[vmware][ubuntu]一个linux调用摄像头截图demo
[vmware][ubuntu]一个linux调用摄像头截图demo
- ①准备环境
- 1.电脑有摄像头(笔记本摄像头也可)
- 2.vmware-开启摄像头相关设置(ubuntu)
- vmware设置
- 测试ubuntu摄像头
- ②ubuntu-安装必备库
- ③ubuntu-编译&运行-摄像头截图代码
①准备环境
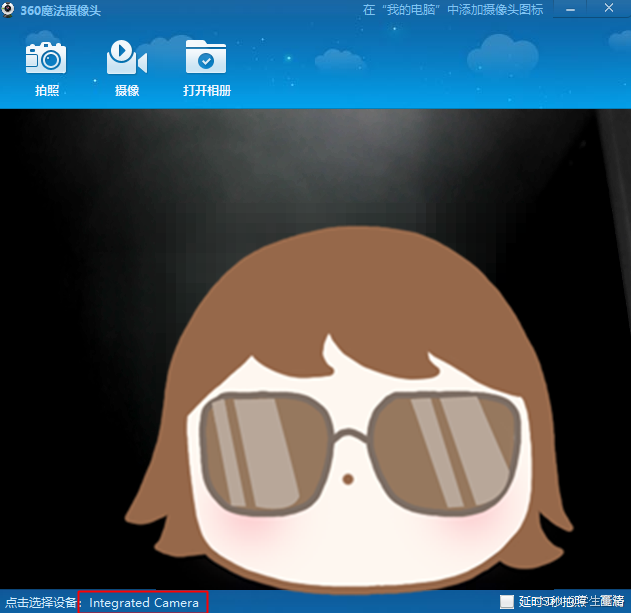
1.电脑有摄像头(笔记本摄像头也可)
本机是windows环境-打开360魔法摄像头-如图√确认摄像头功能正确
2.vmware-开启摄像头相关设置(ubuntu)
我这边安装的ubuntu20.04
vmware设置
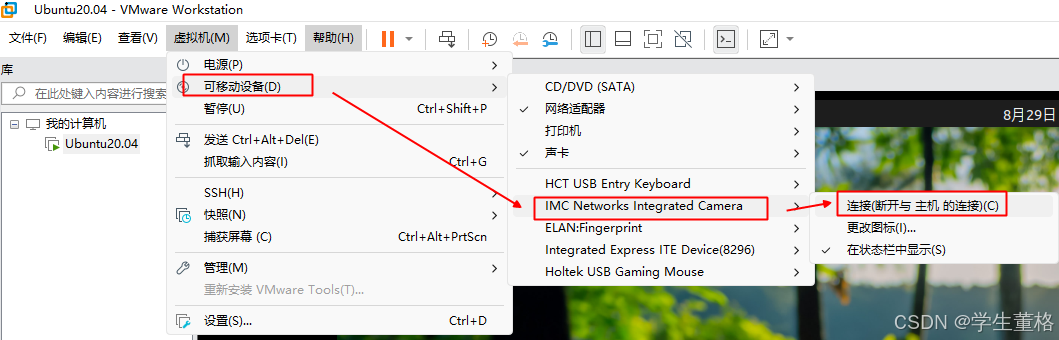
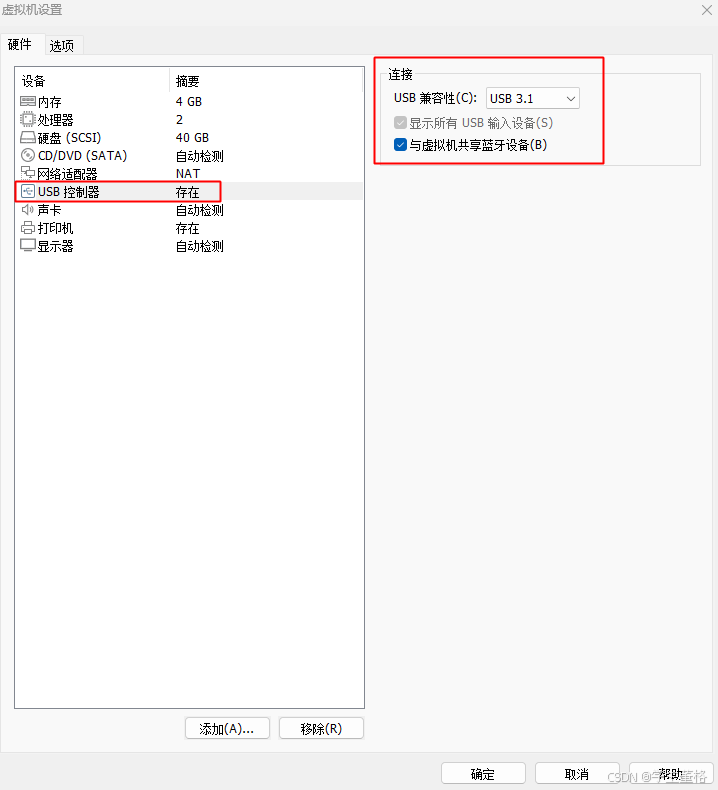 打开USB控制器后-重启Ubuntu-找到虚拟机设置-可以选择开启摄像头
打开USB控制器后-重启Ubuntu-找到虚拟机设置-可以选择开启摄像头
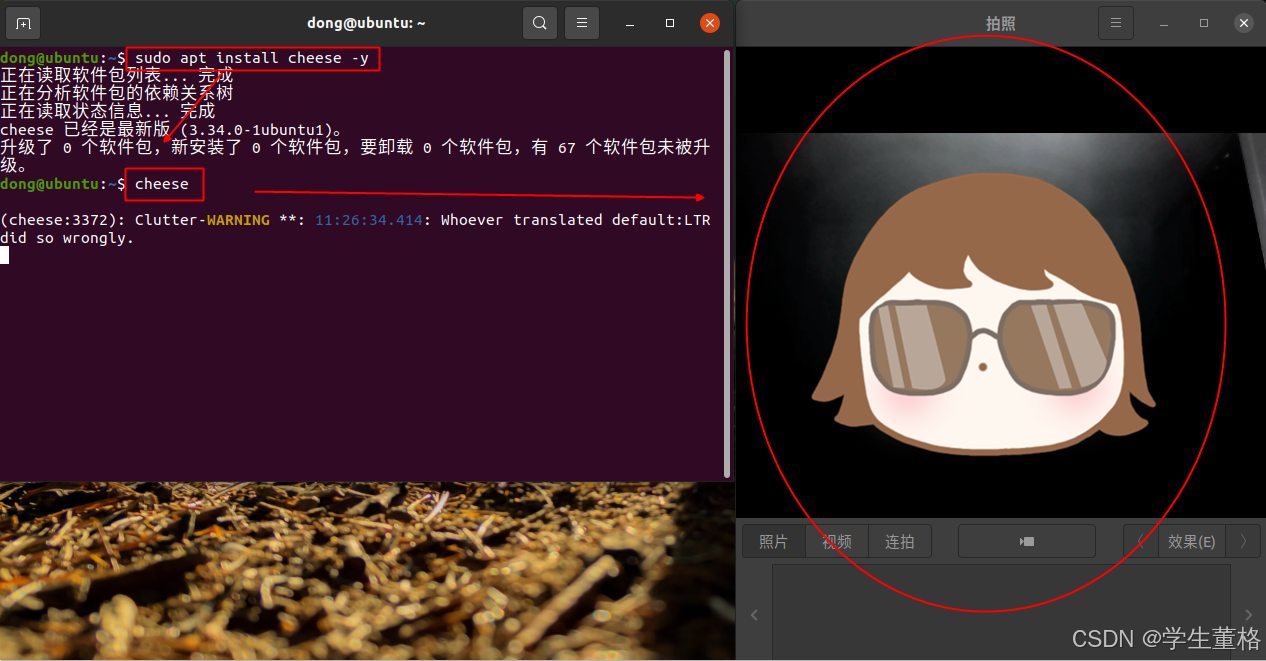
测试ubuntu摄像头
在ubuntu-终端执行:
sudo apt install cheese -y
cheese
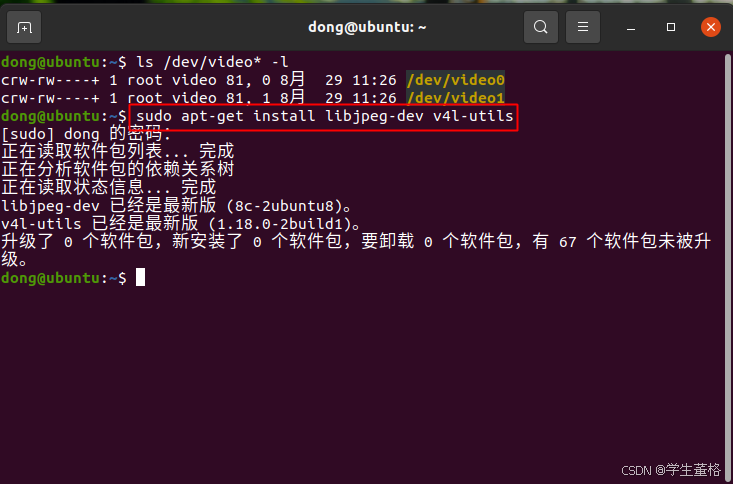
②ubuntu-安装必备库
sudo apt-get install libjpeg-dev v4l-utils
③ubuntu-编译&运行-摄像头截图代码
camera_capture.c
//author:学生董格
//date:20250829
//command1: sudo apt-get install libjpeg-dev v4l-utils
//command2: gcc camera_capture.c -o camera_capture -ljpeg
//run: ./camera_capture#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <fcntl.h>
#include <errno.h>
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <linux/videodev2.h>
#include <jpeglib.h>
#include <setjmp.h>
#include <unistd.h> // 新增:包含close()函数的声明#define DEVICE "/dev/video0"
#define OUTPUT_FILE "capture.jpg"
#define WIDTH 640
#define HEIGHT 480// 定义缓冲区结构
struct buffer {void *start;size_t length;
};static struct buffer *buffers = NULL;
static unsigned int n_buffers = 0;
static int fd = -1;// JPEG错误处理结构
struct my_error_mgr {struct jpeg_error_mgr pub;jmp_buf setjmp_buffer;
};typedef struct my_error_mgr *my_error_ptr;// JPEG错误处理函数
METHODDEF(void)
my_error_exit(j_common_ptr cinfo) {my_error_ptr myerr = (my_error_ptr)cinfo->err;(*cinfo->err->output_message)(cinfo);longjmp(myerr->setjmp_buffer, 1);
}// 初始化摄像头设备
int init_device(const char *dev_name) {struct v4l2_capability cap;struct v4l2_format fmt;struct v4l2_requestbuffers req;unsigned int i;// 打开设备fd = open(dev_name, O_RDWR | O_NONBLOCK, 0);if (fd == -1) {perror("无法打开设备");return -1;}// 检查设备是否支持视频捕获if (ioctl(fd, VIDIOC_QUERYCAP, &cap) == -1) {perror("VIDIOC_QUERYCAP失败");return -1;}if (!(cap.capabilities & V4L2_CAP_VIDEO_CAPTURE)) {fprintf(stderr, "设备不支持视频捕获\n");return -1;}if (!(cap.capabilities & V4L2_CAP_STREAMING)) {fprintf(stderr, "设备不支持流式捕获\n");return -1;}// 设置视频格式memset(&fmt, 0, sizeof(fmt));fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;fmt.fmt.pix.width = WIDTH;fmt.fmt.pix.height = HEIGHT;fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV; // 常用的格式fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;if (ioctl(fd, VIDIOC_S_FMT, &fmt) == -1) {perror("VIDIOC_S_FMT失败");return -1;}// 请求缓冲区memset(&req, 0, sizeof(req));req.count = 4;req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;req.memory = V4L2_MEMORY_MMAP;if (ioctl(fd, VIDIOC_REQBUFS, &req) == -1) {perror("VIDIOC_REQBUFS失败");return -1;}if (req.count < 2) {fprintf(stderr, "内存不足,无法分配缓冲区\n");return -1;}buffers = calloc(req.count, sizeof(*buffers));if (!buffers) {fprintf(stderr, "内存分配失败\n");return -1;}// 映射缓冲区for (n_buffers = 0; n_buffers < req.count; ++n_buffers) {struct v4l2_buffer buf;memset(&buf, 0, sizeof(buf));buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;buf.memory = V4L2_MEMORY_MMAP;buf.index = n_buffers;if (ioctl(fd, VIDIOC_QUERYBUF, &buf) == -1) {perror("VIDIOC_QUERYBUF失败");return -1;}buffers[n_buffers].length = buf.length;buffers[n_buffers].start = mmap(NULL, buf.length,PROT_READ | PROT_WRITE, MAP_SHARED,fd, buf.m.offset);if (buffers[n_buffers].start == MAP_FAILED) {perror("mmap失败");return -1;}}// 队列缓冲区for (i = 0; i < n_buffers; ++i) {struct v4l2_buffer buf;memset(&buf, 0, sizeof(buf));buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;buf.memory = V4L2_MEMORY_MMAP;buf.index = i;if (ioctl(fd, VIDIOC_QBUF, &buf) == -1) {perror("VIDIOC_QBUF失败");return -1;}}// 开始捕获enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;if (ioctl(fd, VIDIOC_STREAMON, &type) == -1) {perror("VIDIOC_STREAMON失败");return -1;}return 0;
}// 将YUYV转换为RGB
void yuyv_to_rgb(const unsigned char *yuyv, unsigned char *rgb, int width, int height) {int i, j;int y0, u, y1, v;int r, g, b;for (i = 0; i < height; i++) {for (j = 0; j < width; j += 2) {// 提取YUYV分量y0 = yuyv[2 * (i * width + j)];u = yuyv[2 * (i * width + j) + 1] - 128;y1 = yuyv[2 * (i * width + j) + 2];v = yuyv[2 * (i * width + j) + 3] - 128;// 转换第一个像素r = y0 + (int)(1.402f * v);g = y0 - (int)(0.344f * u + 0.714f * v);b = y0 + (int)(1.772f * u);rgb[3 * (i * width + j)] = (r > 255) ? 255 : ((r < 0) ? 0 : r);rgb[3 * (i * width + j) + 1] = (g > 255) ? 255 : ((g < 0) ? 0 : g);rgb[3 * (i * width + j) + 2] = (b > 255) ? 255 : ((b < 0) ? 0 : b);// 转换第二个像素r = y1 + (int)(1.402f * v);g = y1 - (int)(0.344f * u + 0.714f * v);b = y1 + (int)(1.772f * u);rgb[3 * (i * width + j + 1)] = (r > 255) ? 255 : ((r < 0) ? 0 : r);rgb[3 * (i * width + j + 1) + 1] = (g > 255) ? 255 : ((g < 0) ? 0 : g);rgb[3 * (i * width + j + 1) + 2] = (b > 255) ? 255 : ((b < 0) ? 0 : b);}}
}// 保存RGB数据为JPEG
int save_jpeg(const unsigned char *rgb_data, int width, int height, const char *filename) {struct jpeg_compress_struct cinfo;struct my_error_mgr jerr;FILE *outfile;JSAMPROW row_pointer[1];int row_stride;// 初始化JPEG压缩对象cinfo.err = jpeg_std_error(&jerr.pub);jerr.pub.error_exit = my_error_exit;if (setjmp(jerr.setjmp_buffer)) {jpeg_destroy_compress(&cinfo);return -1;}jpeg_create_compress(&cinfo);// 打开输出文件if ((outfile = fopen(filename, "wb")) == NULL) {fprintf(stderr, "无法打开输出文件 %s\n", filename);return -1;}jpeg_stdio_dest(&cinfo, outfile);// 设置JPEG参数cinfo.image_width = width;cinfo.image_height = height;cinfo.input_components = 3;cinfo.in_color_space = JCS_RGB;jpeg_set_defaults(&cinfo);jpeg_set_quality(&cinfo, 90, TRUE); // 质量设置,1-100// 开始压缩jpeg_start_compress(&cinfo, TRUE);row_stride = width * 3; // RGB每行的字节数// 逐行写入图像数据while (cinfo.next_scanline < cinfo.image_height) {row_pointer[0] = (JSAMPROW)&rgb_data[cinfo.next_scanline * row_stride];(void)jpeg_write_scanlines(&cinfo, row_pointer, 1);}// 完成压缩jpeg_finish_compress(&cinfo);fclose(outfile);jpeg_destroy_compress(&cinfo);return 0;
}// 捕获一帧图像并保存
int capture_frame() {fd_set fds;struct timeval tv;int r;struct v4l2_buffer buf;unsigned char *rgb_data;// 等待数据就绪FD_ZERO(&fds);FD_SET(fd, &fds);tv.tv_sec = 2;tv.tv_usec = 0;r = select(fd + 1, &fds, NULL, NULL, &tv);if (r == -1) {if (errno == EINTR)return capture_frame();perror("select失败");return -1;}if (r == 0) {fprintf(stderr, "捕获超时\n");return -1;}// 出列缓冲区memset(&buf, 0, sizeof(buf));buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;buf.memory = V4L2_MEMORY_MMAP;if (ioctl(fd, VIDIOC_DQBUF, &buf) == -1) {perror("VIDIOC_DQBUF失败");return -1;}// 分配RGB缓冲区rgb_data = malloc(WIDTH * HEIGHT * 3);if (!rgb_data) {fprintf(stderr, "内存分配失败\n");return -1;}// 转换格式 YUYV -> RGByuyv_to_rgb(buffers[buf.index].start, rgb_data, WIDTH, HEIGHT);// 保存为JPEGif (save_jpeg(rgb_data, WIDTH, HEIGHT, OUTPUT_FILE) != 0) {fprintf(stderr, "保存JPEG失败\n");free(rgb_data);return -1;}printf("成功保存截图到 %s\n", OUTPUT_FILE);// 释放资源free(rgb_data);// 重新入列缓冲区if (ioctl(fd, VIDIOC_QBUF, &buf) == -1) {perror("VIDIOC_QBUF失败");return -1;}return 0;
}// 清理资源
void cleanup() {enum v4l2_buf_type type;unsigned int i;// 停止捕获type = V4L2_BUF_TYPE_VIDEO_CAPTURE;if (ioctl(fd, VIDIOC_STREAMOFF, &type) == -1)perror("VIDIOC_STREAMOFF失败");// 解除映射for (i = 0; i < n_buffers; ++i)if (munmap(buffers[i].start, buffers[i].length) == -1)perror("munmap失败");free(buffers);// 关闭设备if (close(fd) == -1)perror("关闭设备失败");
}int main() {// 初始化设备if (init_device(DEVICE) != 0) {fprintf(stderr, "初始化设备失败\n");return 1;}// 捕获一帧if (capture_frame() != 0) {fprintf(stderr, "捕获帧失败\n");cleanup();return 1;}// 清理资源cleanup();return 0;
}用xftp-上传文件到vmware-ubuntu
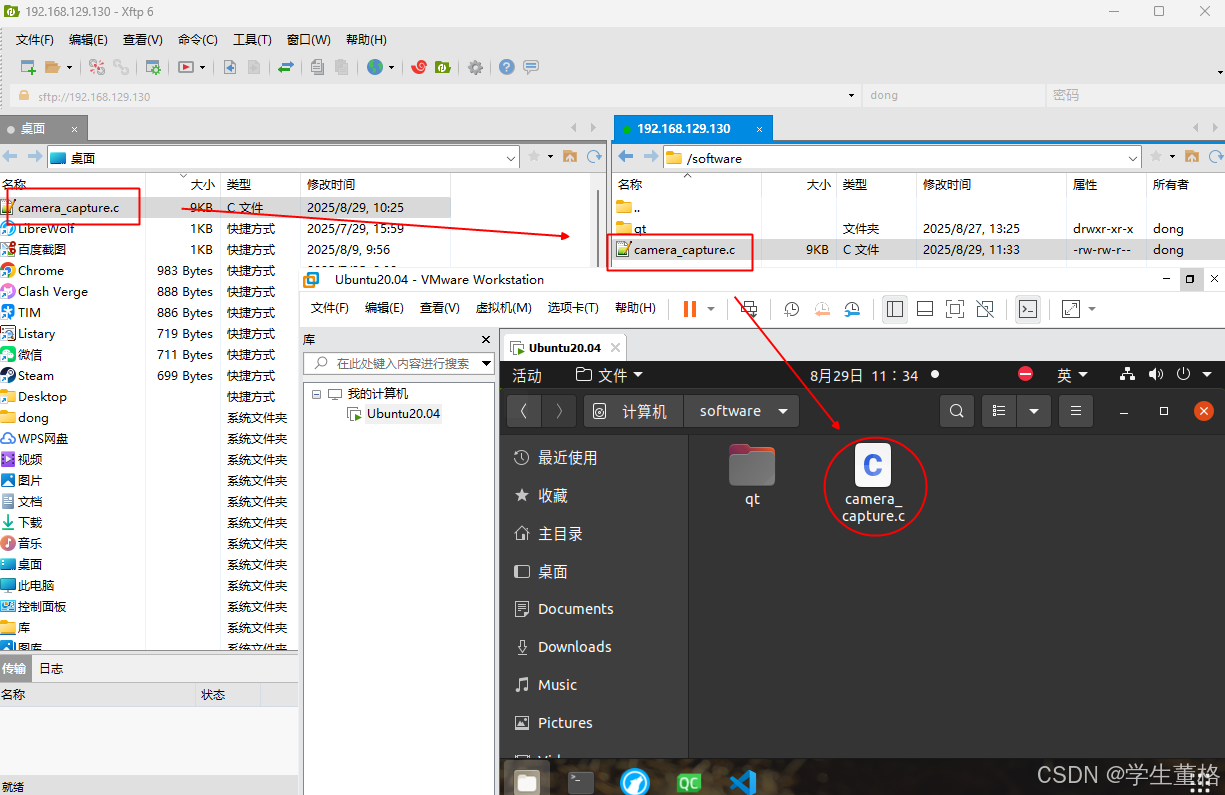
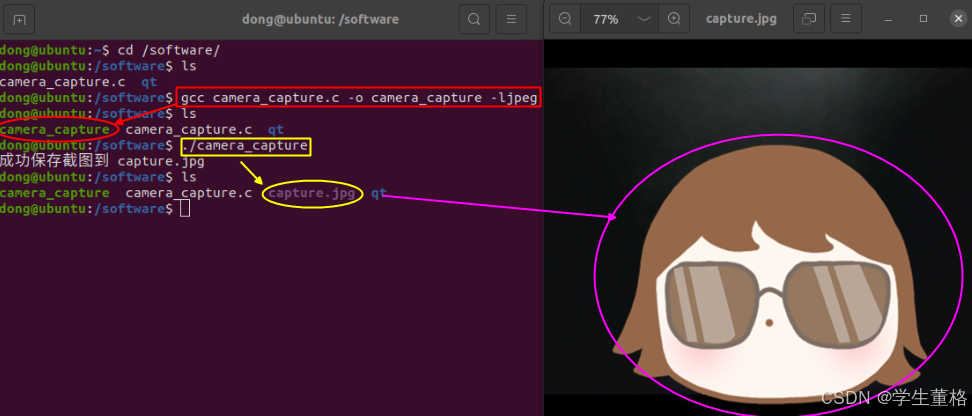
在camera_capture.c所在目录执行:
gcc camera_capture.c -o camera_capture -ljpeg
./camera_capture
如图所示: