六足机器人系统设计与实现cad+设计说明书+电路原图模式+装配图+电路图
摘要
在抗震救灾、石油管道检测方面,由于人员无法到达,因此需要采用轻巧的机器人进入内部进行执勤。迫于实际需求,六足机器人被设计出来以应对这些需求。随着研究的不断进展,六足机器人对地形的适应能力越来越强,并且不再像之前一样那么容易受到天气的影响,另外,在实际使用方面,目前的六足机器人能够搭载更多的传感器,为信号的采集提供了更多的拓展。对于机器人的研究进程,我国虽然已经取得一定的成果但是仍然没有到达世界顶尖的水平,而对于机器人来说,机械结构是其稳定运行并且实现一定功能的前提保证,但是我国的制造业水平却没有达到比较发达的地步。
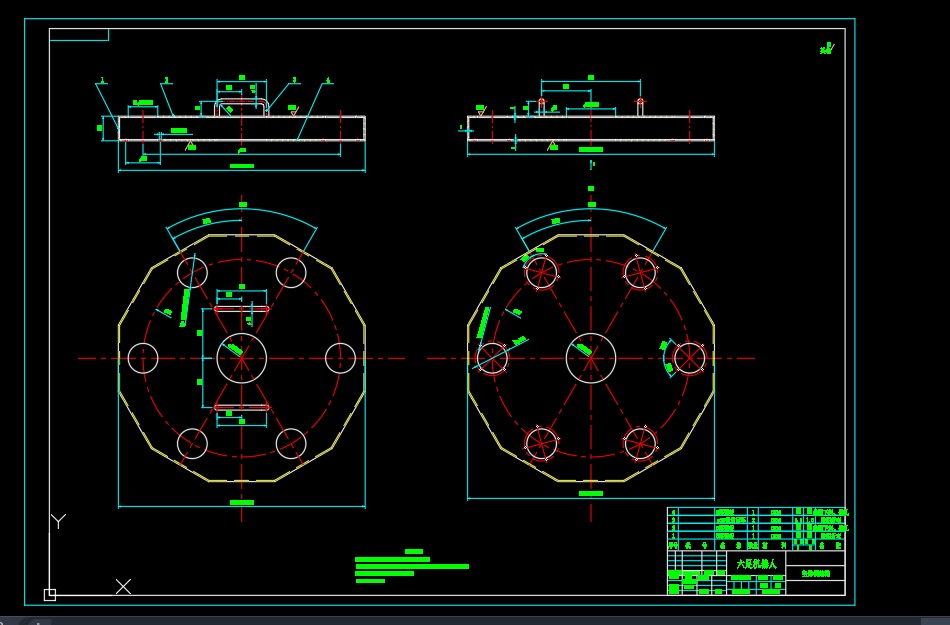
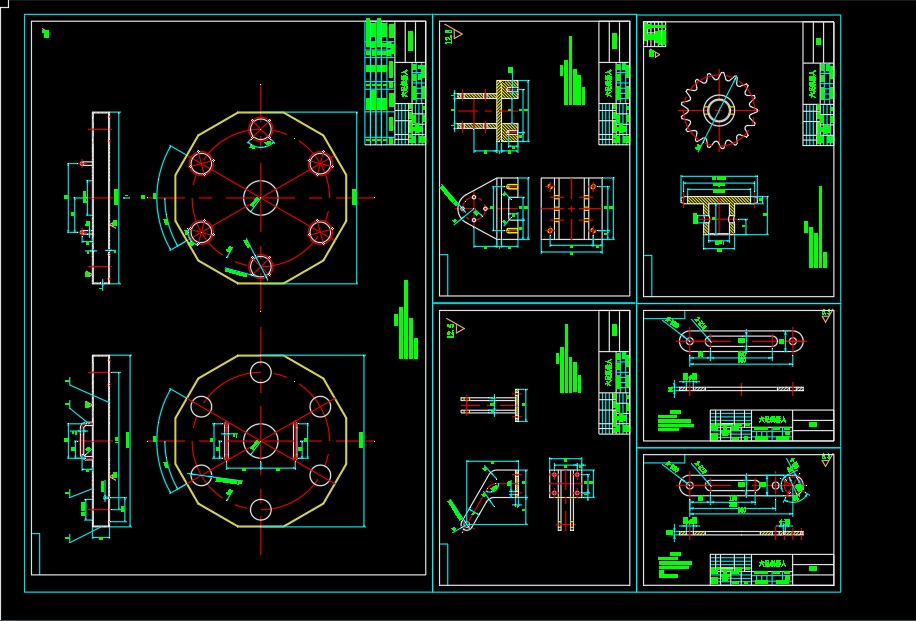
基于此种现状,本文以六足机器人作为研究对象,从机器人的研究现状到整体结构,然后将机器人按照结构进行划分,从零件的选型入手,对其进行理论计算,然后按照机器人中的零件设计准则对零件进行具体尺寸的设计,最后,为了保证设计的合理性,再对上述设计过程中设计的零件进行验证。本次设计由四个主要部件组成:支撑腿升降装置、支撑腿摆动装置、支撑轮转动装置、主体钢结构。在完成机械结构的设计后,还需要有相应的硬件电路作为机器人控制的基础,所以在本文中除了机械结构外,还对机器人的硬件电路进行了设计,从原理图的绘制到PCB的绘制,完成了一个六足机器人的整体设计。
关键词:六足机器人;选型设计;主要部件;养护维修。
目录
摘要 I
Abstract II
第一章 绪论 1
1.1 课题研究背景 1
1.2 课题研究目的及意义 2
1.3 课题国内外研究现状 2
1.4 本文的研究内容 5
第二章 六足机器人设计概述 7
2.1.六足机器人的工作原理 7
2.2六足机器人的步态分析 7
第三章 六足机器人机械选型与设计 9
3.1 已知原始数据及工作条件 9
3.2 设计步骤 9
3.3 外形结构设计 9
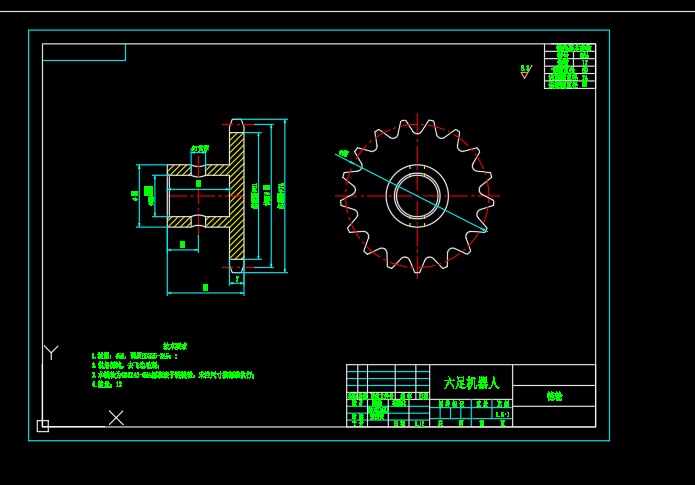
3.4 走行轮选型设计 10
3.4.1 走行轮的作用及类型 10
3.4.2走行轮驱动力计算 13
3.4.3 主要阻力计算 13
3.4.4 倾斜阻力计算 14
3.4.5 走行轮功率()计算 15
3.4.6 轮的计算与校核 15
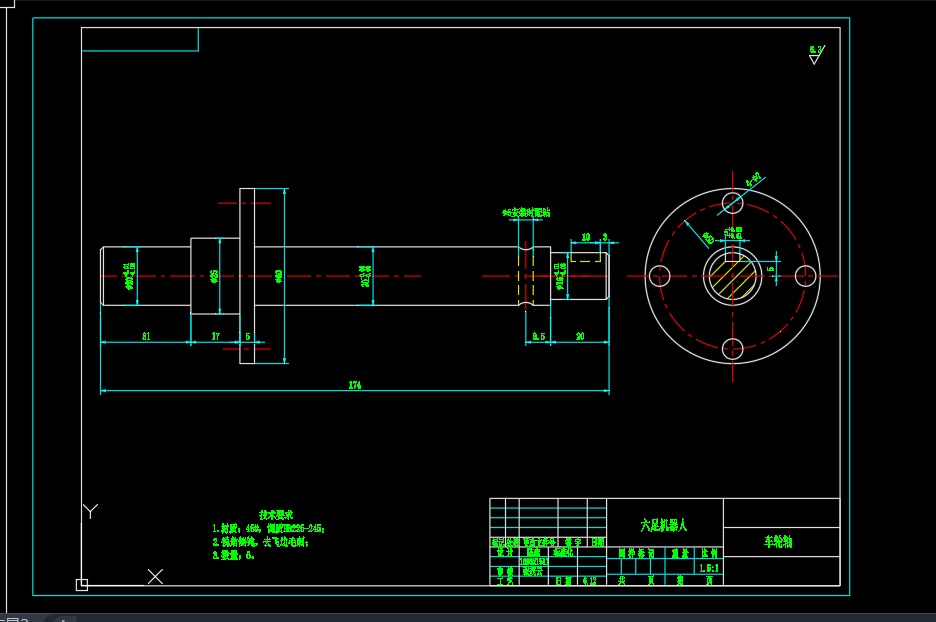
3.5 轴的选型设计 20
3.5.1轴的作用及类型 20
3.5.2轴的材料使用 20
3.5.3 结构设计 20
3.5.4轴与轮的配合结构 21
3.5.5 轴的计算及校核 21
3.6 电机的选用 26
3.7减速器的选用 26
3.8制动装置 27
3.9 转向装置 27
第四章 系统控制电路设计 28
4.1 系统控制电路总体结构设计 28
4.2 STM32电路设计 28
4.2.1复位电路 29
4.2.2时钟电路设计 30
4.3 倾角检测电路设计 30
4.4 电机控制电路设计 31
4.5 无线通信电路设计 31
4.6 语音识别电路设计 31
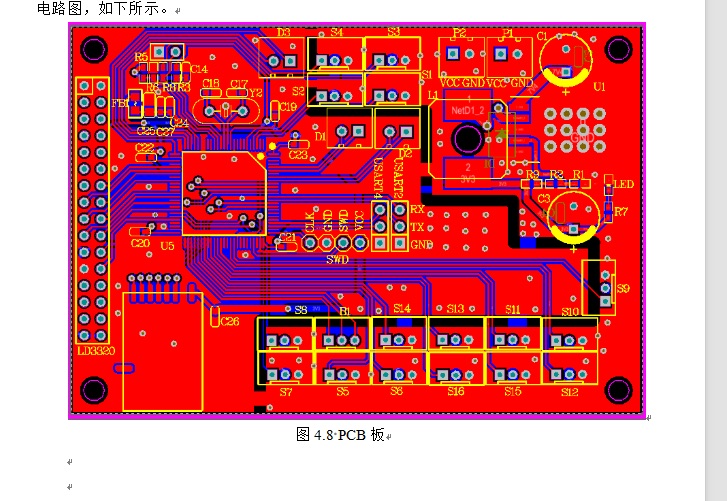
4.7 PCB电路设计 32
第五章 工程定额概算 33
5.1 设计成本预算 33
5.2 设备对环境影响及其可持续性 34
5.3 制作过程管理 34
结论 36
参考文献 37
致谢 39
第一章 绪论
1.1 课题研究背景
随着时代的发展,科技的进步,人们的生活空间也得到了全面的拓展,相应的专家和学者也将科研重心放在机器人的研究之上,而随着当前自动化技术和电子通讯技术的不断发展,机器人领域也逐渐成为了一个综合性学科相互结合的领域,并对人们日常生产生活产生了较为深远的影响【1】。目前来看,机器人领域的研究重点仍然是自主移动式机器人,这种机器人目前是我国863重点课题之一,其比工业机器人的优势更为突出,工作质量和工作效率更高,应用方式也更具灵活性,能够投入到工业生产之中【2】。而目前来看,这种机器人也被应用到军事领域、核电生产领域、石油管道修建领域、医疗领域、海空探索领域之中,能够为人们特殊任务的完成起到有力的推动作用。
自主移动式机器人可以根据其动作形式分为轮式、履带式、足式以及混合移动式机器人,在这之中,轮式机器人的结构最为简单,操控起来也更加容易和方便,其移动过程不会产生较大的摩擦力,移动的速度和效率能够满足具体要求【3】。但这种机器人往往难以应用在地面平坦度不足的路面之中,这也导致其应用的范围得到了缩减。而履带式机器人与地面有着较大的接触面积,其稳定性更强,然而这也会导致其与地面接触摩擦力的不断提升,导致其无法获取更高的工作效率,其能量的消耗也会不断提升。而对于足式机器人而言,其结构体系更加复杂,结构上采用的是冗余设计,使机器人具备了一定的容错性,如果一足损坏,不会对其正常运行产生过多的影响,机器人仍然可以在其他足的配合之下继续执行任务,而在这种多足的设计之下,机器人也能够获取更加良好的稳定性。足式机器人有着更加良好的稳定性,同时其与地面的接触面积也较小,不会耗费大量的能源,有着良好的地形适应能力,同时也不会对地面造成过多的损坏【4】。
所谓的仿生机器人,也就是一种模仿其他生物的外观、动作体系和行为习惯而生成的一种集成体系,能够开展具备了相应生物特点的机器人【5】。仿生机器人的设计囊括了计算机技术、数字化控制技术、机械设备技术和生物学技术,在这种设计模式之下,机器人将具备仿生对象的生物学特征,有着人类赋予的智能,能够高效优质的完成相应的任务。如果机器人面临的环境出现了一定的改变,在当前条件之下的仿生机器人则会出现一定的问题【6】。而这也就要求了相应的专家和从业人员能够从自然界之中探寻生物发展的奥妙,深入调研和分析相应的自然界之中存在的对应案例,不断的学习生物学知识,提升仿生学研究开展的质量与效率,对自然界之中的生物进行有效模仿,使其行为习惯和发展规律得到揭示,进而提取出解决仿生机器人问题的有效对策,确保仿生机器人的技术水平和功能能够达到预期。
1.2 课题研究目的及意义
在本次研究之中,我们的研究对象为六足仿生自主移动机器人,其主要仿生的对象为拥有六只足的昆虫,这种昆虫与哺乳类生物相比,其大脑机制不够完善,然而其适应能力却比哺乳类动物要高出很多。这种昆虫往往包含了较为特殊的身体构造,导致其不需要通过大脑就可以更高的调节自己的身体,提升自身的安全性与稳定性,而这也就使六足机器人有着更加广泛的应用。在2011年,日本就开始使用对应的仿生机器人参与到地震搜救活动之中,并获取了较为显著的成果【7】。而在2014年,韩国科学研究院也将六足机器人应用到沉船事故的定位、搜救以及打捞之中。在2015年,我国在上海国际机器人博览会上,展出了由上海交通大学自主研发的带腰型号的六足机器人,这种机器人能够自主携带检测设备到达相应的事故发生点,并进行位置确定,环境模拟,伤员定位以及救灾物资运输等活动,目前已经进入到应用阶段【8】。
六足昆虫自身拥有较为强大的自我调节功能,能够在较为复杂的环境之下进行生存,然而对于机器人而言,想要在其中加入适应复杂地形的机制却有着一定的难度。六足机器人往往被应用到复杂地形任务的执行之中,这也就使其需要面对更加复杂的地形,更加多元化的道路途径以及更加不确定性的障碍物,需要机器人能够结合实际情况进行地形的穿越,对多种障碍物进行规避,从而探寻到最佳的路径。而从实际情况来看,要求六足机器人控制体系能够在多种传感器的配合之下进行足端控制,确保机器人能够完成预期的动作,因此,在这些动作开展之中,应该对机器人的多个关节进行精准且迅速的控制,这也是确保六足机器人能够达到预期使用要求的核心所在。在本文之中,我们将对六足机器人的控制体系进行深入的研究和分析,对六足机器人的结构体系进行设计,并基于结构体系设计相应的控制体系和控制方案,选择与控制体系相符的软硬件环境,进而明确机器人关节控制算法的优劣性。
1.3 课题国内外研究现状
随着科学技术的不断发展,各个学科也得到了深入的融合,仿生学、数字化控制以及计算机信息控制技术的不断发展与融合也成为了机器人领域之中人们关注的核心所在,国内外的专家学者以及相应的科研机构也针对于六足机器人开展了相应的研究活动,并获取了较为显著的研究成果。在1983年,ODET