[灵动微电子六步换向(方波控制)方案MM32BIN560C] 六步换向实现和规律
六步换向确实不需要Park变换和Clark变换 - 这是与FOC(磁场定向控制)的关键区别。
为什么不需要变换?
FOC需要:
Clark变换:三相到两相转换(abc → αβ)
Park变换:旋转坐标系转换(αβ → dq)
反Park变换:回到静止坐标系(dq → αβ)
SVPWM:复杂的PWM生成算法
六步换向使用:
简单开关逻辑:霍尔传感器直接映射到PWM
方波驱动:任何时候只有两相导通
无坐标变换:直接在三相域工作
查表法:霍尔状态 → PWM模式映射
这个PI控制器的作用
pi_controller.c 用于:
速度控制环:根据速度误差调整PWM占空比
电流限制:基本的电流调节(如果实现了的话)
但不是用于dq轴电流控制(像FOC那样)
六步换向的主要优势
简单性 - 没有复杂的数学运算,CPU开销小,比FOC的变换密集型方法更容易实现。
1. 霍尔传感器检测原理(详细补充)
传感器安装与工作原理:
- 3个霍尔传感器(U/V/W)在空间上间隔120°电角度安装,对应电机的电气周期
- 每个霍尔传感器检测转子永磁体的磁场方向变化
- 当永磁体磁极经过传感器时,输出数字信号(0或1)
- 由于传感器间隔120°,会产生6种不同的相位组合
信号处理流程:
bldc_drv.c
// 在hallhandle.c中的详细实现
uint8_t HALL_ReadHallPorts(void)
{// 读取GPIO端口状态HallA = GPIO_ReadInputDataBit(HALL_PORT, HALLU_PIN); // U相霍尔HallB = GPIO_ReadInputDataBit(HALL_PORT, HALLV_PIN); // V相霍尔 HallC = GPIO_ReadInputDataBit(HALL_PORT, HALLW_PIN); // W相霍尔// 二进制编码:CBA (C为最高位,A为最低位)// 例如:HallA=1, HallB=0, HallC=0 → 001 → 状态1// HallA=0, HallB=1, HallC=0 → 010 → 状态2HallValue = (HallC << 2) | (HallB << 1) | HallA;return HallValue;
}
2. 位置信息编码(深入解释)
有效状态分析:
- 理论上3位二进制有8种组合(000-111),但只有6种是有效的
- 无效状态:000和111(表示霍尔故障或转子位置不确定)
- 有效状态:001, 010, 011, 100, 101, 110
状态映射关系:
bldc_drv.c
二进制 | 十进制 | 物理意义
001 | 1 | 0-60°电角度
010 | 2 | 60-120°
011 | 3 | 120-180°
100 | 4 | 180-240°
101 | 5 | 240-300°
110 | 6 | 300-360°
3. 六步换向过程(详细分解)
步骤1:读取霍尔状态(带防抖处理)
bldc_drv.c
// 在hallhandle.c中的防抖算法
uint8_t HALL_JudgeState(void)
{uint8_t bReadValue1, bReadValue2;uint8_t i, j;bReadValue1 = HALL_ReadHallPorts();// 4次采样防抖:确保霍尔状态稳定for (i = 4, j = 8; i > 0; i--) {if (--j == 0) return bReadValue1;bReadValue2 = HALL_ReadHallPorts();if (bReadValue1 != bReadValue2) {i = 4; // 重新开始计数bReadValue1 = bReadValue2;}}return bReadValue1;
}
步骤2:状态映射与PWM控制(详细实现)
PWM宏定义解析:
bldc_drv.c
// 在board.h或相关头文件中定义的PWM控制宏
#define PWMUH_ON_VL_ON \TIM1->CCR1 = PWM_Duty; /* U相上桥臂导通 */ \TIM1->CCR2 = 0; /* V相上桥臂关闭 */ \TIM1->CCR3 = 0; /* W相上桥臂关闭 */ \/* 下桥臂控制:V相下桥臂导通,其他关闭 */ \GPIO_SetBits(PORT_L, PIN_VL); \GPIO_ResetBits(PORT_L, PIN_UL); \GPIO_ResetBits(PORT_L, PIN_WL);// 其他5种PWM组合类似定义
完整的换向控制:
bldc_drv.c
void MotorDrive(uint8_t u8Value)
{switch(u8Value) {case 1: // B+ C- (001)// V相上桥臂PWM,W相下桥臂导通PWMVH_ON_WL_ON;break;case 2: // A+ B- (010) // U相上桥臂PWM,V相下桥臂导通PWMUH_ON_VL_ON;break;case 3: // A+ C- (011)// U相上桥臂PWM,W相下桥臂导通 PWMUH_ON_WL_ON;break;case 4: // C+ A- (100)// W相上桥臂PWM,U相下桥臂导通PWMWH_ON_UL_ON;break;case 5: // B+ A- (101)// V相上桥臂PWM,U相下桥臂导通PWMVH_ON_UL_ON;break;case 6: // C+ B- (110)// W相上桥臂PWM,V相下桥臂导通PWMWH_ON_VL_ON;break;default: // 故障或无效状态// 关闭所有PWM输出,电机停止TIM1->CCR1 = 0;TIM1->CCR2 = 0; TIM1->CCR3 = 0;PWMH_OFF_PWML_OFF;break;}
}
步骤3:PWM生成原理
TIM1定时器配置:
- 使用高级定时器TIM1生成6路PWM
- 3路互补PWM输出(上桥臂)
- 3路普通PWM输出(下桥臂)
- 带死区时间防止上下桥臂直通
PWM调制方式:
- 上桥臂使用PWM调制(控制转速)
- 下桥臂在换向期间保持导通
- 采用H-PWM-L-ON调制方式
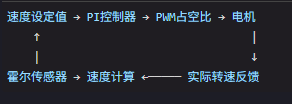
步骤4:速度控制环路
闭环控制结构:
bldc_drv.c
速度设定 → PI控制器 → PWM占空比 → 电机驱动↑ || ↓
霍尔传感器 → 速度计算 ←─────── 实际转速反馈
4. 关键特性深度分析
优点:
- 实时性极高:霍尔变化立即触发换向,响应时间<100μs
- 可靠性强:硬件直接反馈,不受算法误差影响
- 启动性能好:已知初始位置,启动转矩大
- 成本最优:只需要3个霍尔传感器+简单MCU
局限性:
- 依赖传感器:霍尔故障则系统瘫痪
- 转矩脉动:方波驱动导致6步转矩波动
- 低速性能:霍尔分辨率限制低速控制精度
- 机械安装:需要精确的120°安装角度
5. 故障保护机制(详细实现)
霍尔故障检测:
bldc_drv.c
void HALLCheck(uint8_t HallValue)
{// 检测非法状态:000或111if((HallValue == 0) || (HallValue == 7)) {FAULT.bit.HallFlag = 1; // 设置霍尔故障标志// 安全处理:立即关闭PWM输出TIM1->CCR1 = 0;TIM1->CCR2 = 0;TIM1->CCR3 = 0;PWMH_OFF_PWML_OFF;} else {FAULT.bit.HallFlag = 0; // 清除故障标志}
}
完整的保护策略:
- 实时监测:每个控制周期检查霍尔状态
- 故障锁定:一旦检测到故障,锁定保护状态
- 手动复位:需要用户干预才能清除故障
- 多重保护:结合过流、过压、过温保护
6. 性能优化技术
换向补偿:
- 根据转速预测下一个霍尔边沿
- 提前进行换向操作,减少转矩脉动
- 补偿电路和软件延迟
启动算法:
- 初始位置检测
- 强制定向启动
- 开环加速到霍尔信号有效
六步换向的固定规律
1. 换向顺序规律
换向遵循严格的60°电角度间隔,顺序为:
1 → 2 → 3 → 4 → 5 → 6 → 1 → ...
2. PWM导通规律
每个状态只有两相导通,一相浮空:
上桥臂:1相PWM调制(控制速度)
下桥臂:1相持续导通(提供回路)
第三相:完全关闭
3. 电流路径规律
电流总是从一相流入,从另一相流出:
状态1: B+ → C-
状态2: A+ → B-
状态3: A+ → C-
状态4: C+ → A-
状态5: B+ → A-
状态6: C+ → B-
4. 霍尔状态变化规律
霍尔状态按格雷码顺序变化,每次只有1位改变:
001 → 010 → 011 → 100 → 101 → 110 → 001
5. 转矩产生规律
每次换向产生最大转矩的位置
永磁体与定子磁场保持近似90°夹角
确保连续平滑的转矩输出
这种固定规律使得六步换向控制非常简单可靠,只需要根据霍尔状态查表就能确定正确的PWM输出组合。
六步换向速度控制就是占空比控制
六步换向通过PWM占空比控制来实现转速调节。让我详细解释转速控制原理:
转速控制的核心机制
1. PWM占空比调节
// 在PI控制器或速度环中设置PWM占空比
TIM1->CCR1 = PWM_Duty; // 改变这个值来控制转速
TIM1->CCR2 = PWM_Duty;
TIM1->CCR3 = PWM_Duty;
2. 控制原理
提高转速:增加PWM占空比 → 提高电机端电压 → 电流增大 → 转矩增加 → 转速上升
降低转速:减小PWM占空比 → 降低电机端电压 → 电流减小 → 转矩减小 → 转速下降
3. 速度闭环控制
4. 速度检测
通过霍尔传感器计算转速:
测量两个霍尔边沿之间的时间间隔
计算电频率,再转换为机械转速
公式:RPM = (60 × 电频率) / 极对数
5. PI控制实现
速度误差经过PI控制器生成PWM占空比:
PWM_Duty = Kp × Error + Ki × ∫Error dt
这种控制方式虽然简单,但非常有效,能够实现平稳的转速调节。