qt配置ros2环境,简单版本
因为不同的系统环境会有差异,先把我的环境介绍如下:
系统:Ubuntu22.04
ROS版本:ros2 humble
Qt版本:qt-5.14.2
要配置Qt中的ros环境,需要在Qt的系统环境中添加2个变量,一个是编译环境变量、一个是运行环境变量
如下:
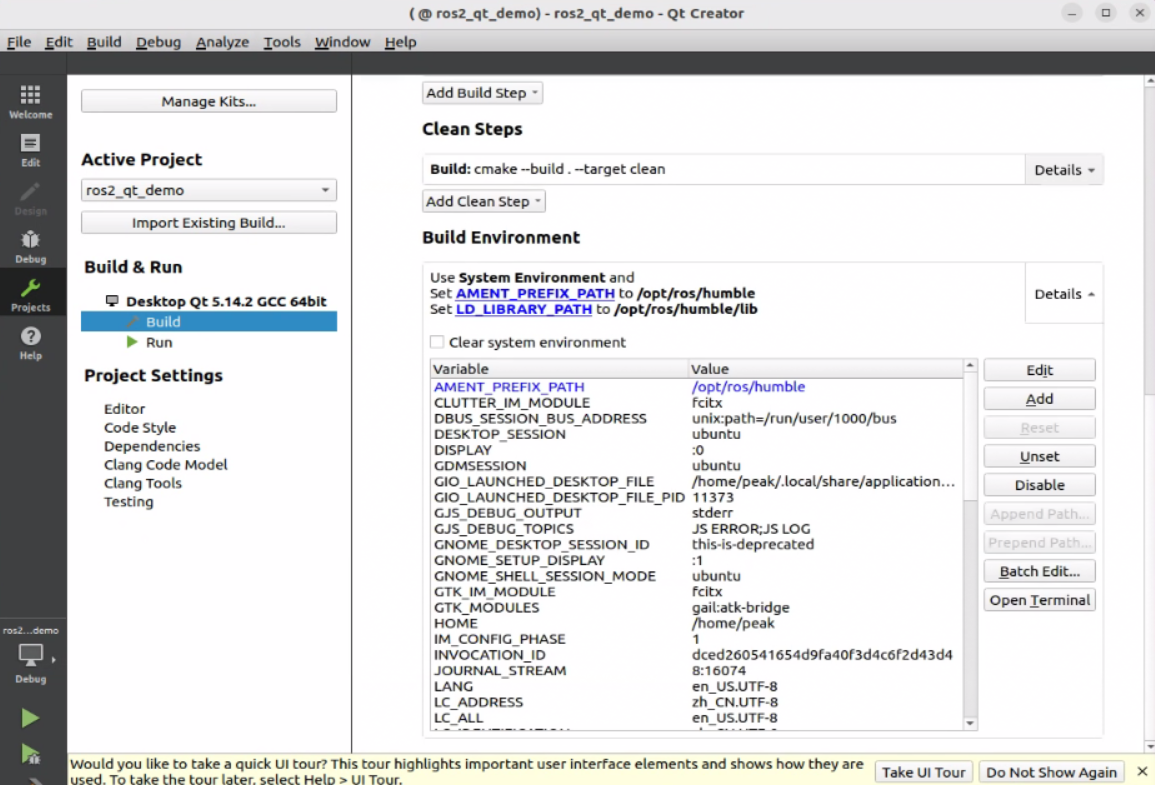
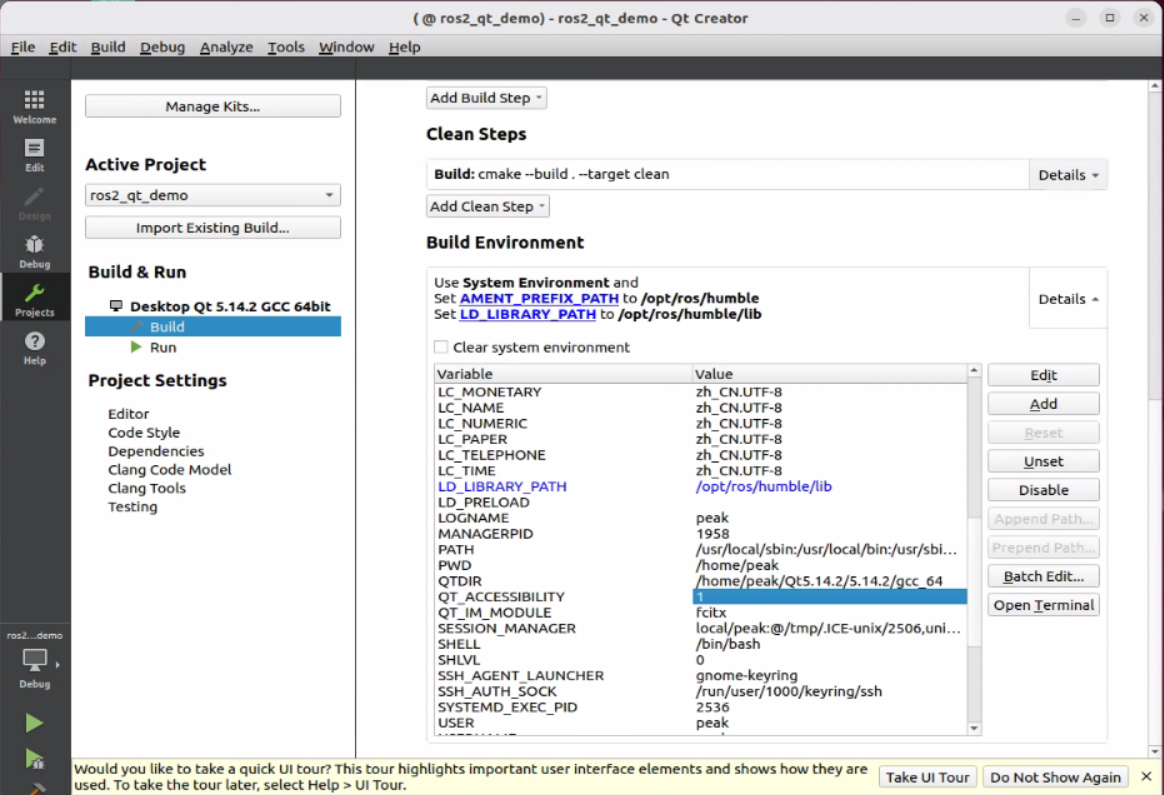
最后还要在CMakeList.txt中添加Ros的环境变量
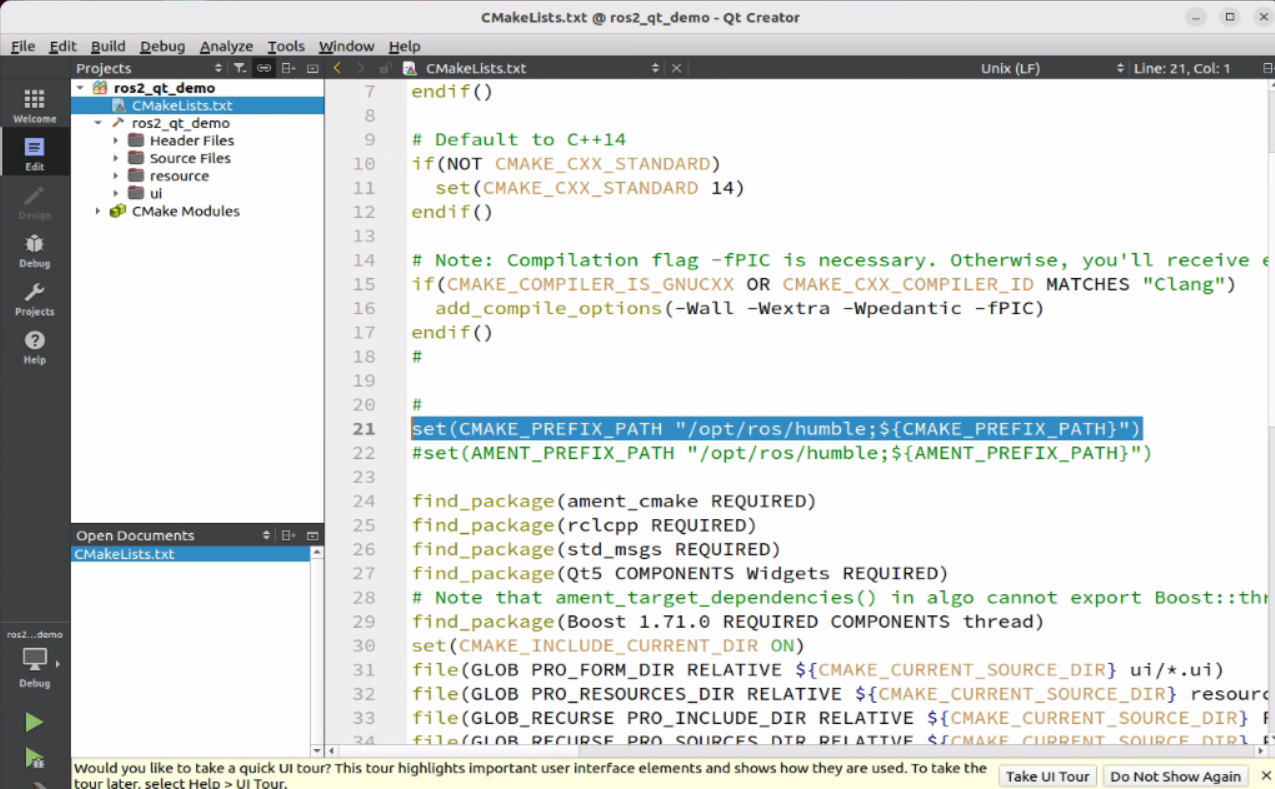
其实ROS1直接在CMakeList.txt中添加就可以了,不知道为什么ROS2要手动添加一下。OK,大家可以试试了。
因为不同的系统环境会有差异,先把我的环境介绍如下:
系统:Ubuntu22.04
ROS版本:ros2 humble
Qt版本:qt-5.14.2
要配置Qt中的ros环境,需要在Qt的系统环境中添加2个变量,一个是编译环境变量、一个是运行环境变量
如下:
最后还要在CMakeList.txt中添加Ros的环境变量
其实ROS1直接在CMakeList.txt中添加就可以了,不知道为什么ROS2要手动添加一下。OK,大家可以试试了。