碰撞检测 | 图解凸多边形分离轴定理(附ROS C++可视化)
目录
- 0 专栏介绍
- 1 凸多边形碰撞检测
- 2 多边形判凸算法
- 3 分离轴定理(SAT)
- 4 算法仿真与可视化
- 4.1 核心算法
- 4.2 仿真实验
0 专栏介绍
🔥课设、毕设、创新竞赛必备!🔥本专栏涉及更高阶的运动规划算法轨迹优化实战,包括:曲线生成、碰撞检测、安全走廊、优化建模(QP、SQP、NMPC、iLQR等)、轨迹优化(梯度法、曲线法等),每个算法都包含代码实现加深理解
🚀详情:运动规划实战进阶:轨迹优化篇
本期实现如下的碰撞检测效果

1 凸多边形碰撞检测
在计算机图形学、游戏开发和机器人运动规划中,碰撞检测是保证物体交互真实性的核心技术。凸多边形因其独特的几何特性(任意两点连线均位于图形内部),成为碰撞检测的高效研究对象。与凹多边形相比,凸多边形的碰撞判定可通过分离轴定理(Separating Axis Theorem, SAT)在多项式时间内完成,且无需复杂的三角剖分。本节将通过几何投影原理,揭示如何通过极值投影快速判断两个凸多边形是否相交
2 多边形判凸算法
并非所有多边形都天生为“凸”。判凸算法是碰撞检测的前置关卡,其任务是判断给定多边形的顶点序列是否满足凸性条件,只有凸多边形才能应用分离轴定理进行碰撞检测。
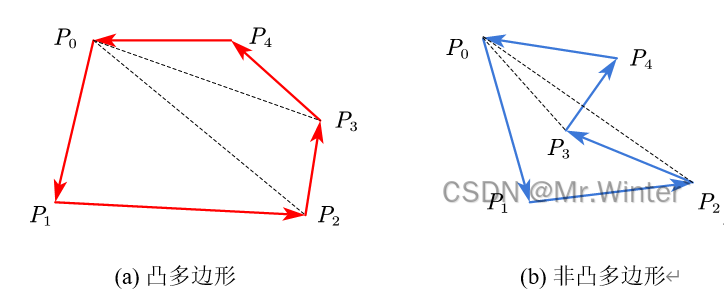
通过向量积可以判断向量的旋转方向。如图所示,由于
P 1 P 2 → × P 2 P 3 → > 0 \overrightarrow{P_1P_2}\times \overrightarrow{P_2P_3}>0 P1P2×P2P3>0
说明从 P 1 P 2 → \overrightarrow{P_1P_2} P1P2到 P 2 P 3 → \overrightarrow{P_2P_3} P2P3是向左转;由于
P 2 P 3 → × P 3 P 4 → > 0 \overrightarrow{P_2P_3}\times \overrightarrow{P_3P_4}>0 P2P3×P3P4>0
说明从 P 2 P 3 → \overrightarrow{P_2P_3} P2P3到 P 3 P 4 → \overrightarrow{P_3P_4} P3P4是向右转。若多边形是凸多边形,则向量的选择方向始终同向——逆时针遍历则总是向左转、顺时针遍历则总是向右转。所以在逆时针遍历多边形顶点的过程中,若存在
P i − 1 P i → × P i P i + 1 → < 0 \overrightarrow{P_{i-1}P_i}\times \overrightarrow{P_iP_{i+1}}<0 Pi−1Pi×PiPi+1<0
则表明多边形非凸,否则为凸多边形。
3 分离轴定理(SAT)
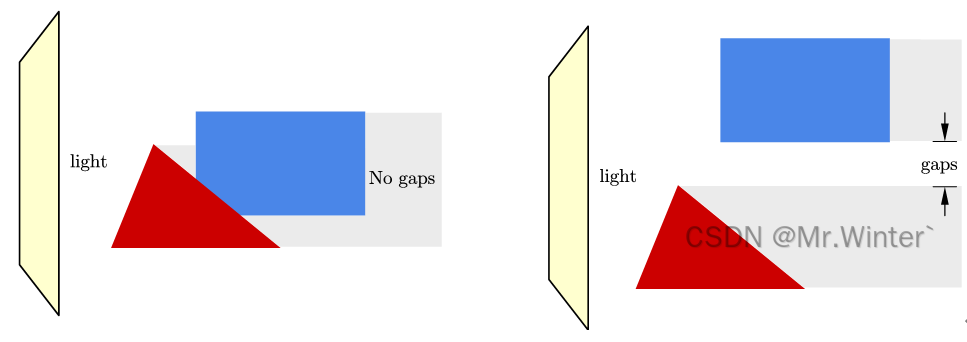
分离轴定理的核心思想直击几何本质:若存在一条直线能将两图形投影分隔,则二者不相交;反之则碰撞。直观地,如下图所示,若两个凸多边形没有发生碰撞,则必存在某角度的光源使两物体的投影存在间隙;也即必存在一条直线使得两个多边形在这条直线上的投影不重叠,这条直线被称为分离轴
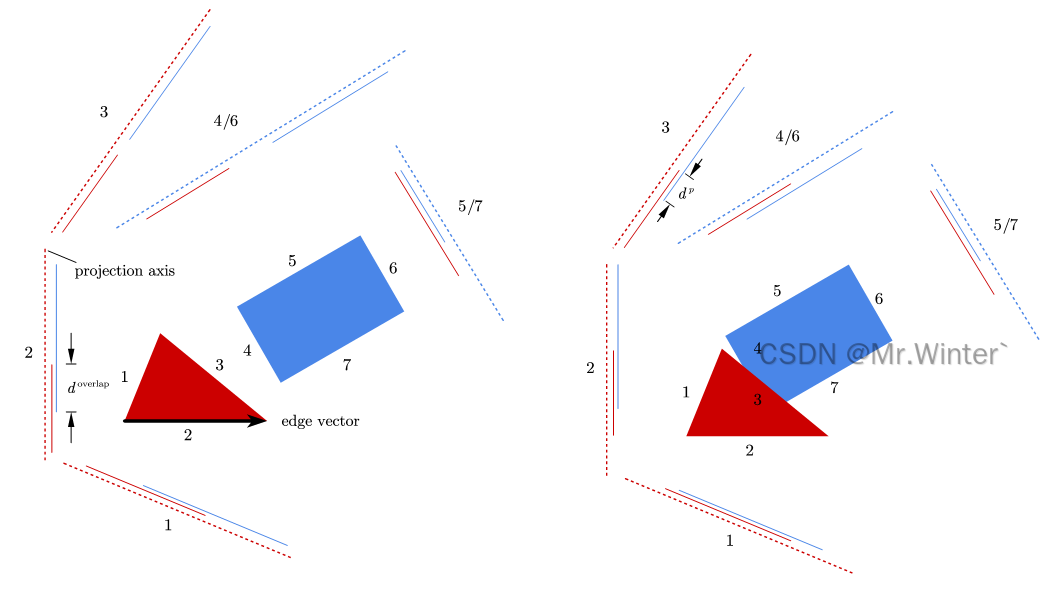
如下图所示,称凸多边形的某条边为边缘向量,平行于边缘向量法向的直线称为投影轴。所有投影轴组成投影轴集合 P P P, ∣ P ∣ |P| ∣P∣等于两个凸多边形的边数之和。遍历 P P P中的每条投影轴 p i \boldsymbol{p}_i pi,将两个多边形分别投影到 p i \boldsymbol{p}_i pi上得到两个投影线段,其重叠区域的长度称为重叠深度 d i o v e r l a p d_{i}^{\mathrm{overlap}} dioverlap。定义穿透深度
d p = min i { d i o v e r l a p } d^p=\min _i\left\{ d_{i}^{\mathrm{overlap}} \right\} dp=imin{dioverlap}
若 d p = 0 d^p=0 dp=0则两个凸多边形没有发生碰撞;若 d p > 0 d^p>0 dp>0则两凸多边形存在碰撞,其中 d p d^p dp所在的投影轴称为穿透向量或分离向量,将其中一个多边形沿分离向量运动 d p d^p dp个单位可以最快消除碰撞。
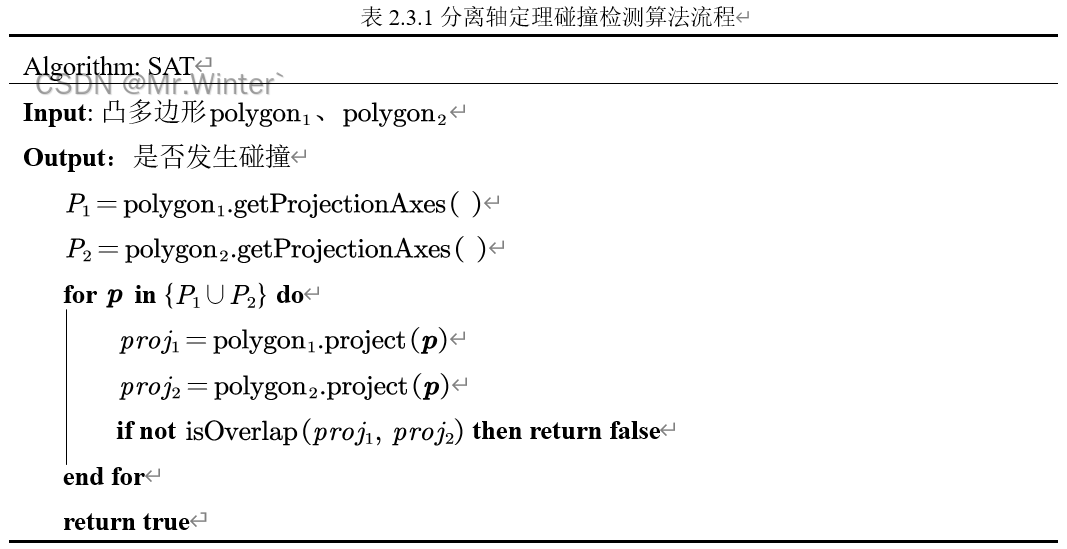
分离轴定理的算法流程如下所示
4 算法仿真与可视化
4.1 核心算法
首先,找到两个待检测多边形的分离轴。分离轴平行于边缘法向量,其位置不限,因为其长度是无限的,该轴的方向才是关键
std::vector<Ogre::Vector3> axes;
for (int i = 0; i < size(); ++i)
{
const auto& pt1 = points_[i];
const auto& pt2 = points_[next(i)];
const auto& edge = pt2 - pt1;
Ogre::Vector3 nor(edge.y, -edge.x, 0.0);
nor.normalise();
axes.emplace_back(std::move(nor));
}
for (int i = 0; i < other->size(); ++i)
{
const auto& pt1 = other->points()[i];
const auto& pt2 = other->points()[other->next(i)];
const auto& edge = pt2 - pt1;
Ogre::Vector3 nor(edge.y, -edge.x, 0.0);
nor.normalise();
axes.emplace_back(std::move(nor));
}
接着,对每一条分离轴计算两个多边形在该轴的投影。通过将一个多边形上的每个顶点向量,与选定的投影轴进行点积,然后保留该多边形在该投影轴上所有投影中的最大值和最小值,即可表示一个多边形在某投影轴上的投影
double proj_1_min, proj_1_max;
double proj_2_min, proj_2_max;
project(points_, axis, proj_1_min, proj_1_max);
project(other->points(), axis, proj_2_min, proj_2_max);
只要存在一条分离轴使两个多边形的投影不重合,即表明不发生碰撞
if (!(proj_1_min <= proj_2_max && proj_2_min <= proj_1_max))
{
return false;
}
4.2 仿真实验
通过Rviz->Add New Tool添加Polygon Simulation插件

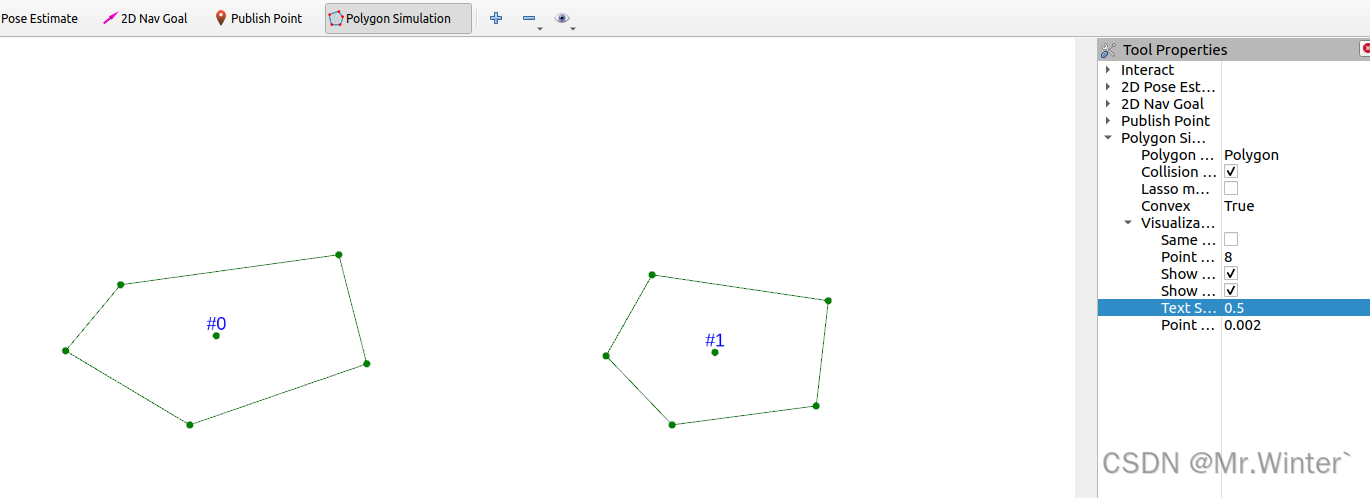
开启碰撞检测功能后验证凸多边形的相交检测功能
- 未相交情形
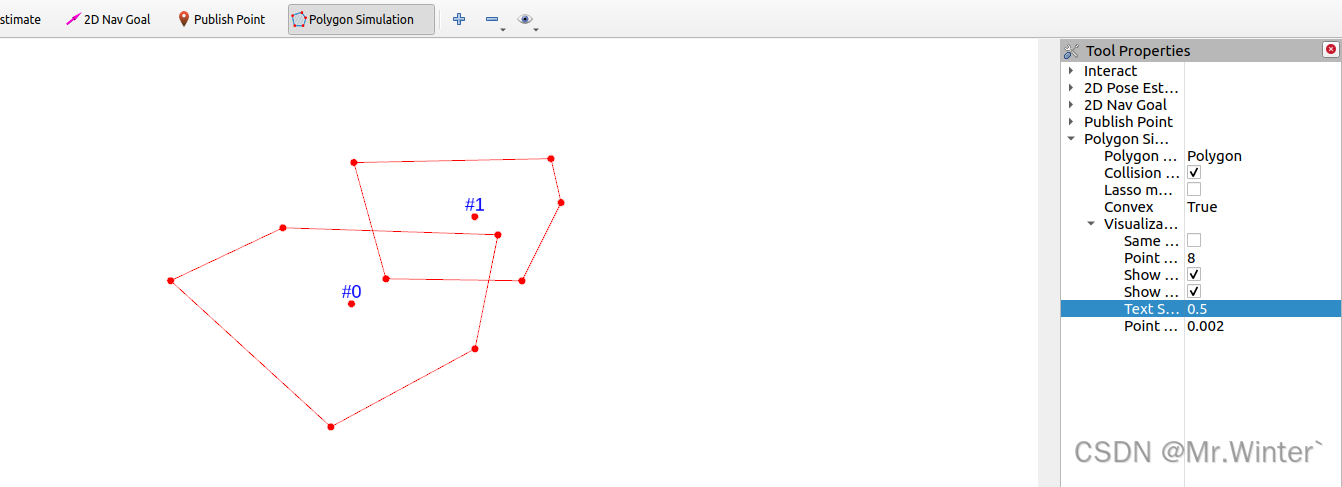
- 相交情形
完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …