[新启航]白光干涉仪与激光干涉仪的区别及应用解析
引言
在精密测量领域,干涉仪作为基于光的干涉原理实现高精度检测的仪器,被广泛应用于工业制造、科研实验等场景。其中,白光干涉仪与激光干涉仪是两类具有代表性的设备,二者在原理、性能及适用场景上存在显著差异。明确这些差异并掌握其应用特点,对合理选择测量工具具有重要意义。
工作原理的差异
白光干涉仪
白光干涉仪以宽光谱白光为光源,其核心原理是利用白光的低相干性(相干长度通常仅数微米)产生干涉条纹。光源发出的白光经分光镜分为参考光与物光,参考光射向固定参考镜,物光照射被测样品表面,两束反射光汇合后,仅在光程差接近零时形成清晰干涉条纹。通过垂直扫描参考镜,记录不同位置的干涉条纹强度变化,利用包络曲线峰值定位样品各点高度,进而重建 3D 轮廓。
激光干涉仪
激光干涉仪采用单色性好、相干长度极长(可达数十米甚至更长)的激光作为光源。其工作基于激光的高相干性,光束经分光后形成测量光与参考光,测量光随被测物体移动,参考光路径固定,二者的光程差变化会导致干涉条纹移动。通过计数条纹移动数量,结合激光波长可精确计算被测物体的位移量,实现线性、角度、平面度等几何量的高精度测量。
性能特点的区别
测量维度与精度
白光干涉仪擅长三维形貌测量,垂直分辨率可达纳米甚至亚纳米级,能捕捉样品表面的微观起伏,如粗糙度、台阶高度等,但在大尺度线性测量上精度较低。激光干涉仪则以一维或二维几何量测量为主,线性测量精度可达纳米级,可实现数米范围内的高精度位移检测,但对表面微观形貌的细节呈现能力有限。
光源与干涉特性
白光的宽光谱特性使其干涉条纹仅在极小光程差范围内清晰,适合微观高度定位;而激光的单色性使其干涉条纹稳定且范围广,适合大尺度位移测量。此外,白光干涉信号受环境干扰相对更明显,对测量环境稳定性要求较高;激光干涉仪则因激光的强方向性和高亮度,抗干扰能力更强。
应用领域的不同
白光干涉仪的应用
白光干涉仪在微纳米尺度表面测量中表现突出,主要应用于半导体制造中硅片表面粗糙度、薄膜厚度检测,光学元件(如透镜、棱镜)的面形误差测量,以及微机电系统(MEMS)的微观结构形貌分析等。例如,在光学镜片生产中,可通过其获取镜片表面的三维轮廓,评估球面度、平面度等参数是否达标。
激光干涉仪的应用
激光干涉仪凭借大尺度高精度测量能力,广泛应用于机床校准(如车床、铣床的定位精度检测)、精密位移台的运动精度标定、大尺寸工件的长度计量等领域。在航空航天领域,常用于航天器部件的装配精度测量;在科研实验中,可用于精密仪器的位移校准和振动测量等场景。
关键技术指标对比
在测量范围上,白光干涉仪的垂直测量范围通常为微米至毫米级,横向范围为毫米级;激光干涉仪的线性测量范围可达数十米,远超白光干涉仪。在分辨率方面,白光干涉仪垂直分辨率优势显著,激光干涉仪则在大尺度位移测量的分辨率上更具竞争力。此外,白光干涉仪测量速度相对较慢,适合静态微观测量;激光干涉仪响应速度快,可实现动态位移的实时监测。
大视野 3D 白光干涉仪:纳米级测量全域解决方案
突破传统局限,定义测量新范式!大视野 3D 白光干涉仪凭借创新技术,一机解锁纳米级全场景测量,重新诠释精密测量的高效精密。

三大核心技术革新
1)智能操作革命:告别传统白光干涉仪复杂操作流程,一键智能聚焦扫描功能,轻松实现亚纳米精度测量,且重复性表现卓越,让精密测量触手可及。
2)超大视野 + 超高精度:搭载 0.6 倍镜头,拥有 15mm 单幅超大视野,结合 0.1nm 级测量精度,既能满足纳米级微观结构的精细检测,又能无缝完成 8 寸晶圆 FULL MAPPING 扫描,实现大视野与高精度的完美融合。
3)动态测量新维度:可集成多普勒激光测振系统,打破静态测量边界,实现 “动态” 3D 轮廓测量,为复杂工况下的测量需求提供全新解决方案。
实测验证硬核实力
1)硅片表面粗糙度检测:凭借优于 1nm 的超高分辨率,精准捕捉硅片表面微观起伏,实测粗糙度 Ra 值低至 0.7nm,为半导体制造品质把控提供可靠数据支撑。
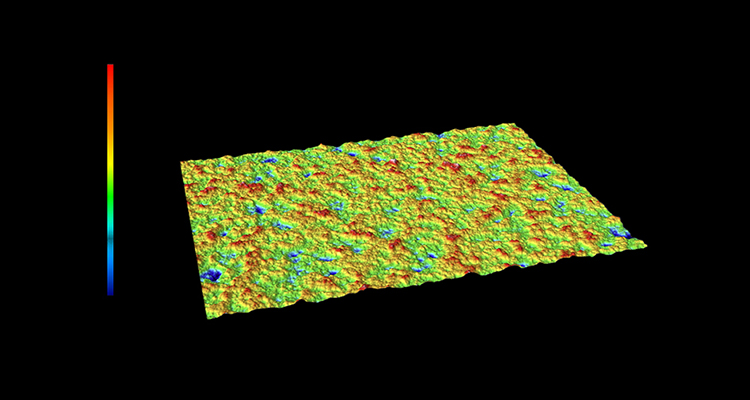
(以上数据为新启航实测结果)
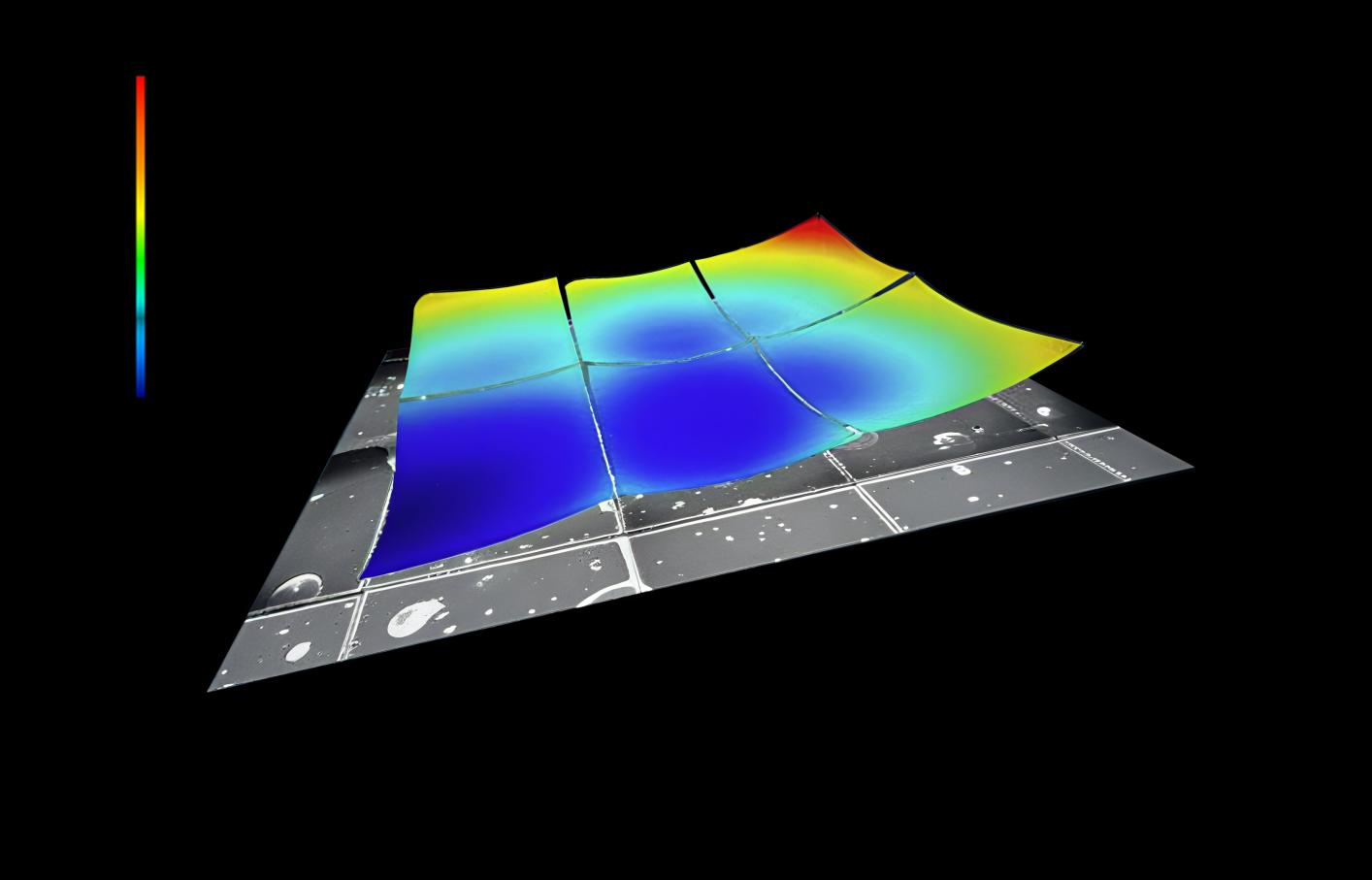
有机油膜厚度扫描:毫米级超大视野,轻松覆盖 5nm 级有机油膜,实现全区域高精度厚度检测,助力润滑材料研发与质量检测。
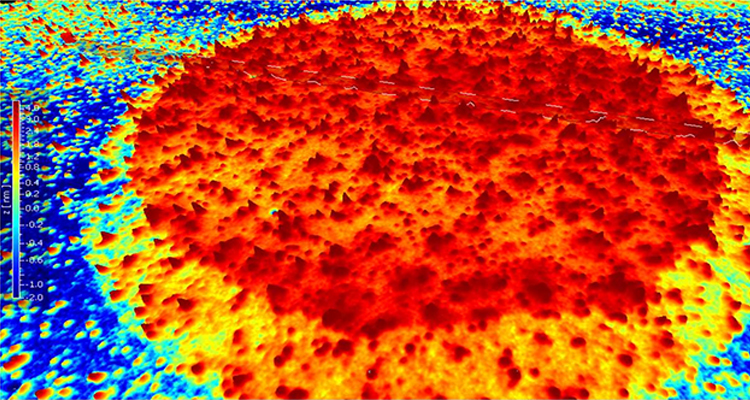
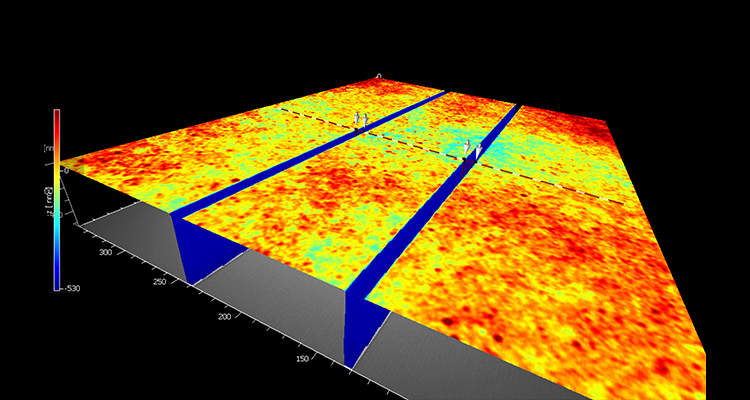
高深宽比结构测量:面对深蚀刻工艺形成的深槽结构,展现强大测量能力,精准获取槽深、槽宽数据,解决行业测量难题。
分层膜厚无损检测:采用非接触、非破坏测量方式,对多层薄膜进行 3D 形貌重构,精准分析各层膜厚分布,为薄膜材料研究提供无损检测新方案。
新启航半导体,专业提供综合光学3D测量解决方案!