【2025CVPR-目标检测方向】UniMamba:基于激光雷达的3D目标检测,采用分组高效曼巴语进行统一空间信道表示学习
1. 研究背景与动机
- 问题:现有基于LiDAR的3D目标检测方法存在局限:
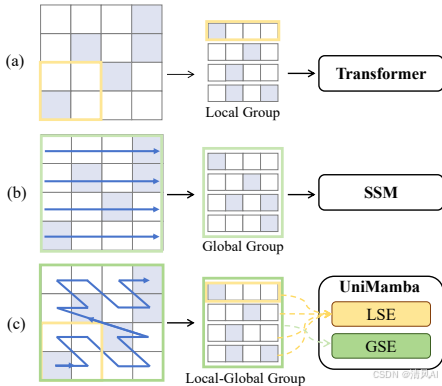
- Transformer方法:计算复杂度高(O(n2)),需将3D体素分组为多个序列,导致感受野受限(图1a)。
- 稀疏卷积方法:感受野小,难以捕获全局上下文。
- 序列化过程:将3D体素展平为1D序列会破坏空间结构。
- 解决思路:受Mamba(状态空间模型,SSM)在NLP和2D视觉中的线性计算复杂度启发,将其引入3D检测,但需解决:
- 序列化导致的空间局部性丢失
- 全局建模的冗余问题
- 局部与全局依赖的平衡
2. 核心创新:UniMamba架构
整体框架(图2)
- 流程:点云体素化 → Un