"""
只标注圆心 + 颜色一致性过滤 + 输出过程图思路:
1) 灰度 + Otsu 阈值;若圆为黑色前景,则反相使圆为白色前景(距离变换以白为前景)
2) 形态学闭运算,修补小孔/断裂
3) 欧氏距离变换(圆心处距离≈半径)
4) 距离模板相关得到峰值响应,阈值化为候选区域
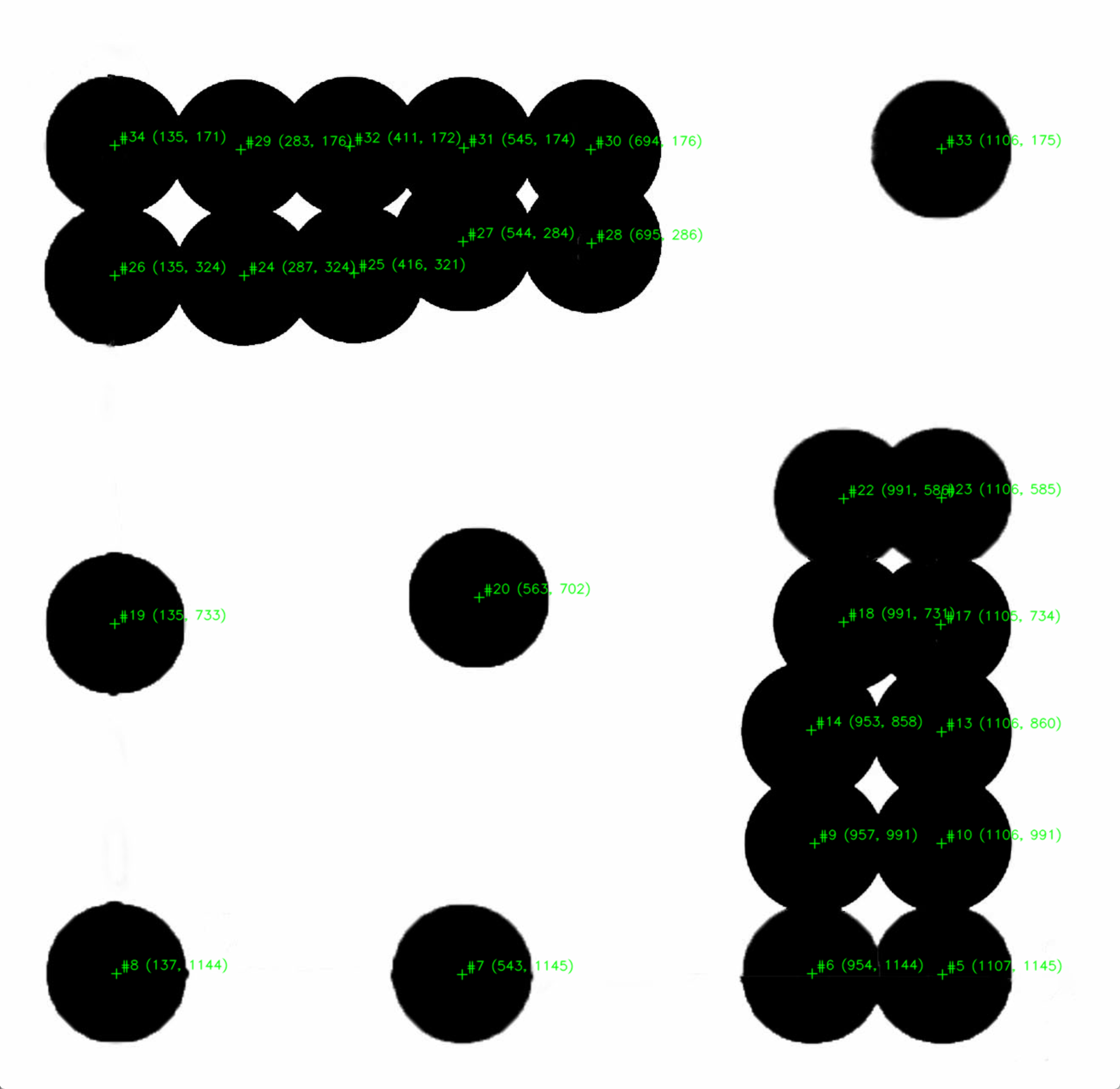
5) 每个候选区域在距离图上取局部极大(圆心),并做“颜色一致性”过滤:- 圆心像素必须为前景(白)- 圆心附近小圆盘区域的前景占比 >= min_fg_ratio(默认 0.6)
6) 仅在圆心画十字;保存中间过程图
"""import os
import cv2
import numpy as np
img_path = 'code.jpg'
out_dir = 'out'
invert_binary = True
peak_thresh_ratio = 0.60
min_peak_area = 5
borderSize = 75
gap = 10
disk_fraction = 0.5
min_fg_ratio = 0.60
marker_color = (0, 255, 0)
marker_size = 12
marker_thickness = 1def ensure_dir(d):if not os.path.exists(d):os.makedirs(d)def to_vis_u8(img_f32):"""将 float 图像线性归一化到 0~255 的 uint8,便于保存/显示"""v = cv2.normalize(img_f32, None, 0, 255, cv2.NORM_MINMAX)return v.astype(np.uint8)def fg_ratio_in_disk(fg_u8, cx, cy, r_eff):"""计算以 (cx, cy) 为圆心、半径 r_eff 的小圆盘内,前景(255)像素比例。fg_u8: 二值图或形态学结果,前景=255,背景=0"""h, w = fg_u8.shape[:2]if r_eff < 1:return 0.0x0, y0 = max(0, cx - r_eff), max(0, cy - r_eff)x1, y1 = min(w - 1, cx + r_eff), min(h - 1, cy + r_eff)roi = fg_u8[y0:y1+1, x0:x1+1]if roi.size == 0:return 0.0mask = np.zeros_like(roi, dtype=np.uint8)cv2.circle(mask, (cx - x0, cy - y0), r_eff, 255, thickness=-1)area = int(np.count_nonzero(mask))if area == 0:return 0.0fg_count = int(np.count_nonzero(cv2.bitwise_and(roi, mask)))return fg_count / areadef main():ensure_dir(out_dir)im = cv2.imread(img_path, cv2.IMREAD_COLOR)if im is None:raise FileNotFoundError(f'无法读取图像:{img_path}')gray = cv2.cvtColor(im, cv2.COLOR_BGR2GRAY)_, bw = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU)if invert_binary:bw = cv2.bitwise_not(bw)cv2.imwrite(os.path.join(out_dir, '01_bw.png'), bw)kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3))morph = cv2.morphologyEx(bw, cv2.MORPH_CLOSE, kernel)cv2.imwrite(os.path.join(out_dir, '02_morph.png'), morph)dist = cv2.distanceTransform(morph, cv2.DIST_L2, 5)cv2.imwrite(os.path.join(out_dir, '03_dist.png'), to_vis_u8(dist))distborder = cv2.copyMakeBorder(dist, borderSize, borderSize, borderSize, borderSize,cv2.BORDER_CONSTANT | cv2.BORDER_ISOLATED, 0)kernel2 = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (2 * (borderSize - gap) + 1, 2 * (borderSize - gap) + 1))kernel2 = cv2.copyMakeBorder(kernel2, gap, gap, gap, gap,cv2.BORDER_CONSTANT | cv2.BORDER_ISOLATED, 0)distTempl = cv2.distanceTransform(kernel2, cv2.DIST_L2, 5)nxcor = cv2.matchTemplate(distborder, distTempl, cv2.TM_CCOEFF_NORMED)cv2.imwrite(os.path.join(out_dir, '04_nxcor.png'), to_vis_u8(nxcor))_, mx, _, _ = cv2.minMaxLoc(nxcor)_, peaks = cv2.threshold(nxcor, mx * peak_thresh_ratio, 255, cv2.THRESH_BINARY)peaks8u = cv2.convertScaleAbs(peaks)cnt_res = cv2.findContours(peaks8u, cv2.RETR_CCOMP, cv2.CHAIN_APPROX_SIMPLE)contours = cnt_res[0] if len(cnt_res) == 2 else cnt_res[1]peaks_clean = np.zeros_like(peaks8u)kept_bboxes = []for cnt in contours:area = cv2.contourArea(cnt)if area >= min_peak_area:cv2.drawContours(peaks_clean, [cnt], -1, 255, thickness=-1)kept_bboxes.append(cv2.boundingRect(cnt))cv2.imwrite(os.path.join(out_dir, '05_peaks_mask.png'), peaks_clean)annotated = im.copy()centers = []for index, (x, y, w_box, h_box) in enumerate(kept_bboxes):mask_roi = peaks_clean[y:y+h_box, x:x+w_box]min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(dist[y:y+h_box, x:x+w_box], mask=mask_roi)cx, cy = int(max_loc[0] + x), int(max_loc[1] + y)r = int(round(max_val)) if morph[cy, cx] == 0:continuer_eff = max(4, int(r * disk_fraction))fg_ratio = fg_ratio_in_disk(morph, cx, cy, r_eff)if fg_ratio < min_fg_ratio:continuecenters.append((cx, cy))cv2.drawMarker(annotated, (cx, cy),color=marker_color,markerType=cv2.MARKER_CROSS,markerSize=marker_size,thickness=marker_thickness,line_type=cv2.LINE_AA)cv2.putText(annotated, f'#{index+1} ({cx}, {cy})', (cx + 5, cy - 5),cv2.FONT_HERSHEY_SIMPLEX, 0.5, marker_color, 1, cv2.LINE_AA)print(f'最终圆心数:{len(centers)}')for i, (cx, cy) in enumerate(centers, start=1):print(f'#{i}: x={cx}, y={cy}')cv2.imwrite(os.path.join(out_dir, '06_centers.png'), annotated)cv2.imshow('centers', annotated)cv2.waitKey(0)cv2.destroyAllWindows()if __name__ == '__main__':main()