惯性导航中的IMU传感器是什么?
内容概要
在深入了解惯性导航系统的核心组件之前,掌握其基本框架至关重要。本文聚焦于IMU传感器的核心作用,它是构成现代导航定位的基础感知单元。我们将探讨高精度组合惯导系统如何实现高精度定位定向,并深入分析影响IMU传感器价格的关键因素。同时,如何甄别可靠的IMU传感器供应商也是确保系统性能的重要环节。文章将特别关注这些技术在船舶与海洋工程领域的应用价值,阐述其如何为船舶姿态、航向与速度的实时数据获取提供强大支撑。后续内容将提供一份实用的选购综合指南。

IMU传感器核心作用
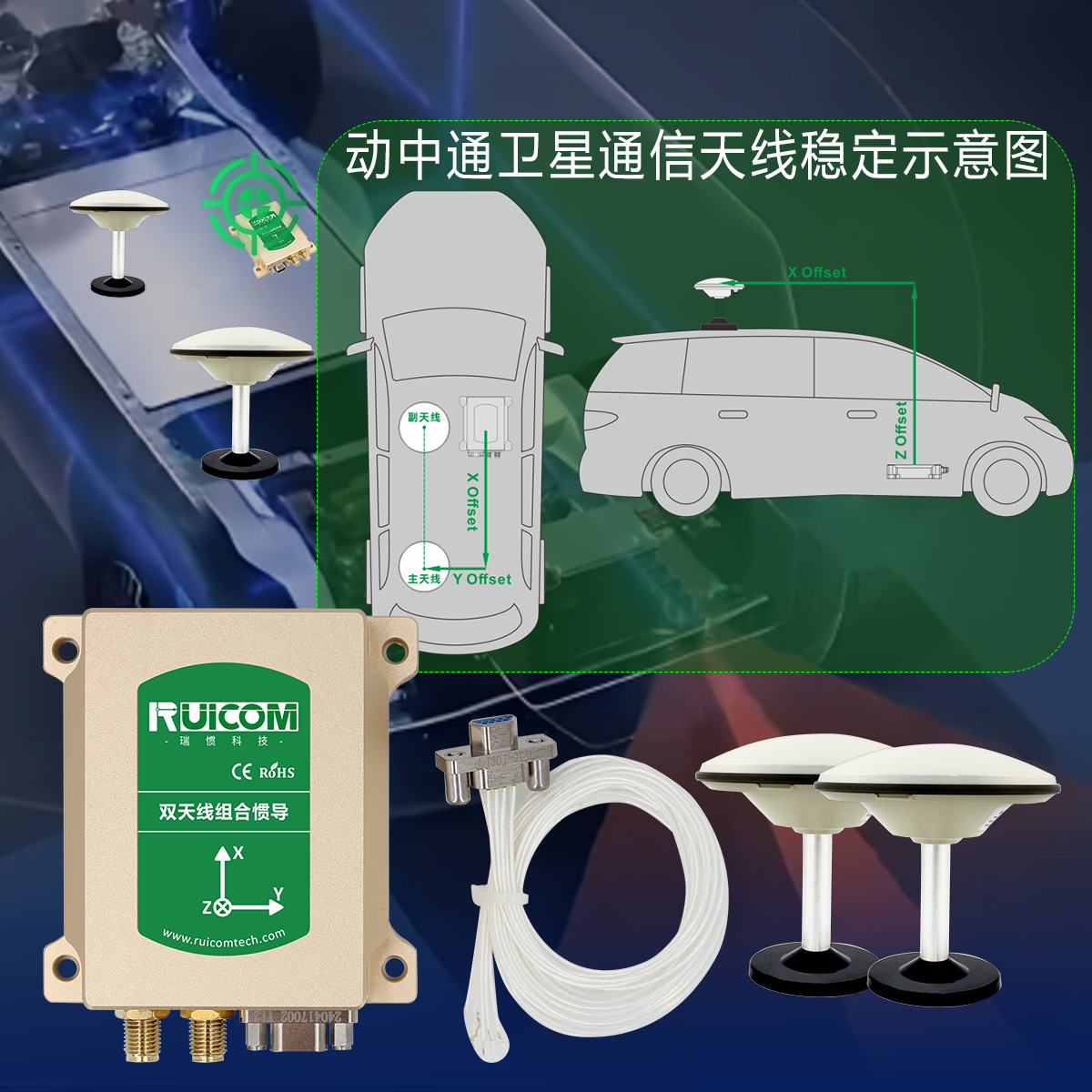
IMU传感器,即惯性测量单元,是构成现代惯性导航系统的基石。它通过内部集成的加速度计和陀螺仪,持续感知载体在三维空间中的线加速度和角速度变化。在惯性导航中,IMU的核心作用在于提供最基础、最实时的运动原始数据。这些数据是导航系统计算载体位置、姿态(航向、俯仰、横滚)和速度不可或缺的初始输入。没有IMU持续、精确的测量,后续的导航解算就如同无源之水。其精度和可靠性直接决定了整个导航系统的性能上限,尤其是在卫星信号受限或完全拒止的环境中(如深海、隧道、复杂电磁环境),IMU提供的不依赖外部信息的自主导航能力变得至关重要。
选择具备高稳定性和低噪声特性的IMU传感器,是确保惯性导航系统在复杂工况下仍能提供可信赖姿态与位置信息的关键第一步。
高精度惯导高精度
高精度组合惯导系统在惯性导航中展现出惊人的高精度性能,这主要得益于其先进的IMU传感器集成和实时算法优化。典型应用中,姿态精度可控制在0.01度以内,位置漂移率低至每小时1海里以下,远超普通导航设备。权威机构如国际海事组织指出,这种精度水平是船舶工程中实时姿态和航向数据可靠性的关键保障。同时,高性能IMU传感器的使用确保了速度测量的稳定性,为后续价格因素分析提供了基础。在海洋环境中,高精度惯性导航显著提升了安全性和操作效率。
价格因素深度分析
在惯性导航系统中,IMU传感器的价格受多个关键因素影响。精度等级是首要考量,高精度组合惯导系统要求超高精度传感器,这显著推高成本,因为制造过程需严格质量控制。此外,组件材料如陀螺仪和加速度计的质量差异、技术规格复杂度以及品牌声誉都直接影响价格波动。IMU传感器供应商的定价策略也扮演重要角色,不同供应商基于规模和市场定位提供不同报价。对于船舶工程应用,可靠性和实时数据需求进一步增加价格压力。因此,理解这些因素为后续供应商选择策略奠定基础。
供应商选择策略
选择可靠的IMU传感器供应商对于惯性导航系统的整体性能和长期可靠性至关重要。在评估供应商时,首要关注其技术实力与产品认证情况,特别是对于要求严苛的高精度组合惯导应用,供应商是否具备相关领域的ISO 9001等质量体系认证是基础门槛。其次,深入考察供应商的生产经验与历史业绩,尤其在船舶与海洋工程这类复杂环境中的实际应用案例,能有效验证其IMU产品的环境适应性和长期稳定性。最后,供应商的技术支持与售后服务能力不容忽视,能否提供及时、专业的技术响应和备件供应,直接关系到船舶等平台获取实时姿态、航向与速度数据的连续性与准确性。综合考量这些因素,才能筛选出真正满足高精度惯性导航需求的合作伙伴。
船舶工程应用
在广阔的海洋环境中,特别是在远离海岸线或GPS信号受到干扰的区域,惯性导航系统(INS)及其核心组件IMU传感器对于船舶的安全航行至关重要。通过持续测量船舶的加速度和角速率变化,IMU能够实时提供船体的姿态(如横摇、纵摇)、航向以及速度信息。这些精确的数据对于大型船舶(如集装箱船、油轮)在复杂海况下保持稳定航向、避免碰撞以及进行精确的靠泊操作具有决定性作用。即使在卫星导航信号暂时失效的情况下,高质量的IMU传感器也能确保船舶在短时间内依靠纯惯性导航继续安全航行,为船员提供关键的决策依据,大大提升了海上作业的安全性和效率。
实时数据获取优势
在瞬息万变的海洋环境中,惯性导航系统所提供的实时数据能力至关重要。IMU传感器作为其核心组件,能够持续且独立地测量载体的角速度和线加速度变化。这种实时性意味着系统无需依赖外部信号(如GPS),就能在任何时刻、任何地点(包括水下或信号受干扰区域)即时输出关键的导航信息。对于船舶与海洋工程而言,这直接转化为对自身姿态(俯仰、横滚)、精确航向以及速度变化的瞬时掌握。无论是进行高精度定位作业、规避突发障碍物,还是在复杂海况下保持稳定航行,这种毫秒级的实时数据反馈都是确保操作安全性和效率的核心优势,为决策和自动控制系统提供了不可替代的时间窗口。
选购综合指南
在选择IMU传感器时,需综合考量多个关键因素以确保最佳性能。首先,IMU传感器价格直接影响成本效益,建议对比不同规格的报价,避免仅追求低价而牺牲精度。其次,高精度组合惯导系统对高精度要求严格,因此应优先选择兼容此类系统的传感器,以保障惯性导航的可靠性。此外,评估IMU传感器供应商的信誉与技术支援至关重要,包括产品认证和售后服务,这能减少后续维护风险。对于船舶与海洋工程应用,实时姿态数据获取依赖于传感器的稳定性,综合考虑这些因素能帮助用户做出明智决策。
结论
惯性导航系统作为现代船舶与海洋工程的关键技术,其核心组件IMU传感器的性能直接决定了整个系统的精度与可靠性。高精度组合惯导系统凭借其卓越的高精度性能,成为获取实时姿态、航向与速度数据的理想选择。在考虑IMU传感器价格时,必须将其置于系统整体价值和长期运行成本中考量,确保获得最佳的投资回报率。同时,审慎评估IMU传感器供应商的技术实力、产品质量与售后服务至关重要,这是保障系统稳定运行和持续获得高精度定位导航信息的基础。因此,深入理解IMU的核心作用,综合权衡价格因素并选择可靠的供应商,最终是实现船舶高效、安全作业不可或缺的环节。
常见问题
IMU传感器在惯性导航中具体起什么作用?
IMU传感器测量加速度和角速度,为导航系统提供核心数据,支撑姿态、航向和速度计算。
高精度组合惯导如何保证高精度性能?
它融合IMU与GPS等传感器,通过算法补偿误差,实现厘米级定位精度,适用于严苛环境。
IMU传感器价格受哪些关键因素影响?
价格主要取决于精度等级、材料成本、品牌差异及附加功能,如抗冲击或温度稳定性。
如何评估IMU传感器供应商的可靠性?
考察供应商的行业认证、产品测试报告、售后服务响应和技术支持经验。
在船舶工程中,IMU传感器如何提升实时数据获取?
它持续监测船舶姿态和运动,确保导航数据的即时性和准确性,优化海上作业安全。