UE5 PCG 笔记(二) Difference 节点
下面笔记不一定对,只是我自己的理解
我在想实现很多种物体例如 树, 石头, 草,等等互不影响效果
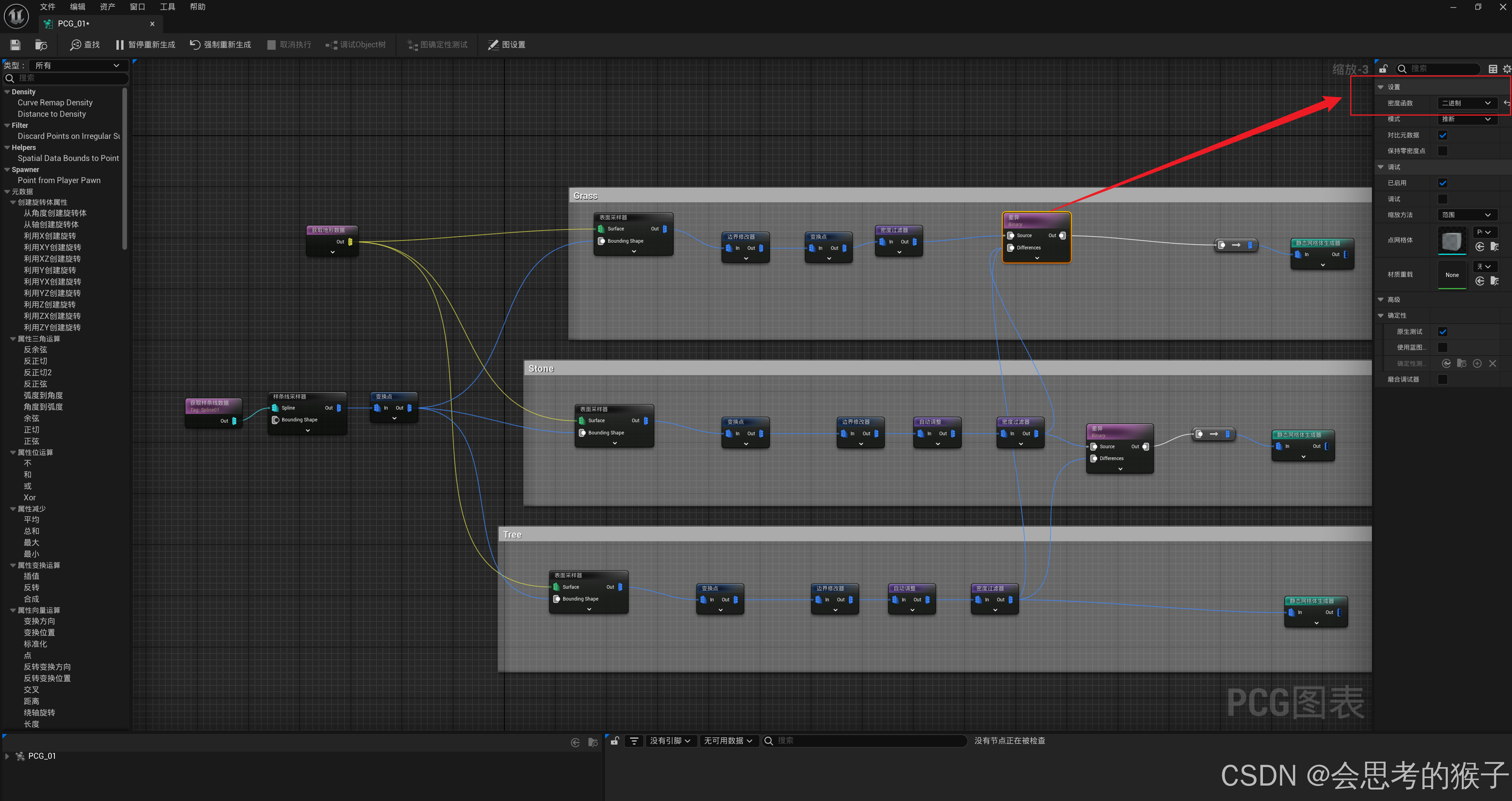
OK,让我们来看看这个Difference Node ,source 连接大范围的点,例如草 肯定比石头的点多,Differences 连接需要被排除的点范围,例如石头,然后我们需要模式选择二进制,至于为啥我也不知道,


下面笔记不一定对,只是我自己的理解
我在想实现很多种物体例如 树, 石头, 草,等等互不影响效果
OK,让我们来看看这个Difference Node ,source 连接大范围的点,例如草 肯定比石头的点多,Differences 连接需要被排除的点范围,例如石头,然后我们需要模式选择二进制,至于为啥我也不知道,