CiA402 伺服驱动标准与控制模式详解
CiA402 伺服驱动标准与控制模式详解
一、CiA402 是什么?
-
标准背景
- CiA402,全称 CANopen Device Profile for Drives and Motion Control,是由 CAN in Automation (CiA) 组织定义的驱动设备配置文件。
- 最初设计用于 CANopen 总线,但后来被 EtherCAT、POWERLINK、SERCOS III 等总线广泛采用。
- 它定义了一个 统一的对象字典 和 状态机 + 控制模式,使不同厂家的伺服驱动能在同一接口下互换。
-
主要目标
- 统一控制方式(位置/速度/力矩等模式)。
- 标准化状态机(开机、使能、停机、故障)。
- 兼容多种总线(CANopen/EtherCAT/Profinet)。
- 适配不同应用场景(定位、插补、同步、力控)。
二、CiA402 的核心组成
1. 对象字典(Object Dictionary)
- 驱动通过对象字典暴露配置参数(速度、加速度、极限值等)、实时变量(目标位置、实际速度)和控制指令。
- 对象字典分为 通信对象 (COB-ID) 和 过程数据对象 (PDO)。
- 上位机通过 SDO(服务数据对象)配置,PDO 进行实时交换。
2. 状态机(State Machine)
-
驱动必须遵守 CiA402 定义的 标准状态机,典型状态有:
- Switch On Disabled(上电禁止)
- Ready to Switch On(准备就绪)
- Switched On(上电,但未使能输出)
- Operation Enabled(运行使能)
- Fault(故障)
-
上位机通过 控制字 (Controlword) 控制状态机切换,驱动通过 状态字 (Statusword) 返回当前状态。
三、支持的控制模式
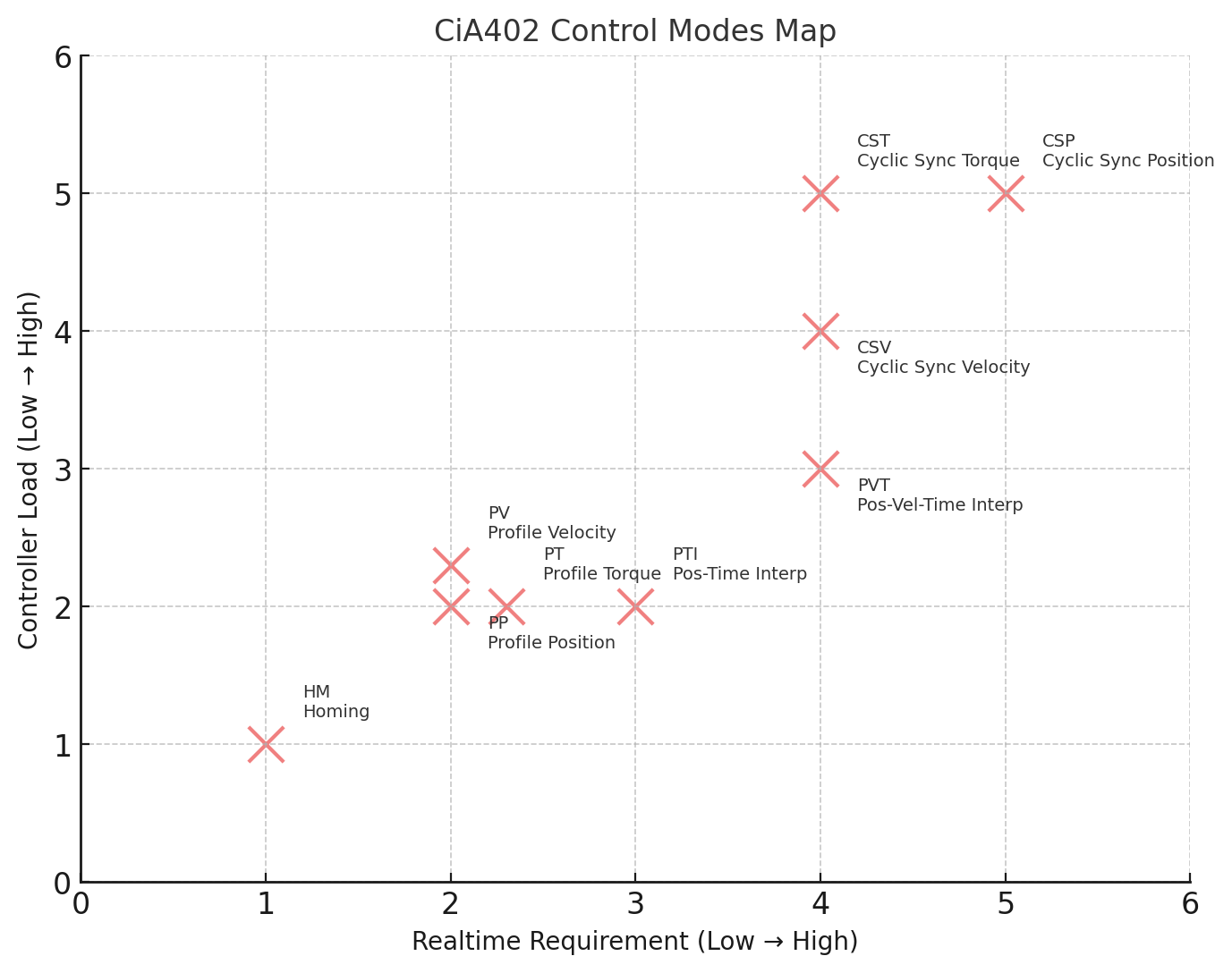
CiA402 标准定义了多种运动控制模式,每种模式适配不同场景。
1. Profile 系列(点到点模式)
-
Profile Position Mode (PP)
- 典型的点到点位置模式。
- 控制器下发目标位置,驱动根据设定的加减速参数执行。
- 常用于 Pick & Place、输送线定位。
-
Profile Velocity Mode (PV)
- 点到点速度模式。
- 控制器下发目标速度,驱动加速到达并维持。
- 常用于 恒速送料、卷绕张力控制。
-
Profile Torque Mode (PT)
- 点到点力矩模式。
- 控制器下发目标力矩(电流),驱动保持该输出。
- 常用于 压装、张力控制、柔性夹持。
2. Homing 模式
-
Homing Mode (HM)
- 驱动执行标准化的回零过程(利用限位开关、Z 相、软限位等)。
- 常用于 机械初始位置校准。
3. Cyclic Synchronous 系列(周期同步模式)
-
Cyclic Synchronous Position (CSP)
- 上位机每周期下发目标位置(带时间戳)。
- 驱动在周期内插值并跟踪。
- 优点:多轴同步精度高(EtherCAT DC 下可 <1 µs)。
- 应用:机器人、多轴插补、CNC。
-
Cyclic Synchronous Velocity (CSV)
- 上位机下发目标速度。
- 驱动在本地积分实现运动。
- 应用:卷绕、恒速输送、张力控制。
-
Cyclic Synchronous Torque (CST)
- 上位机下发目标力矩/电流。
- 驱动直接执行电流环。
- 应用:机器人力控、柔顺控制、压装。
4. Interpolated Position Modes(插补模式)
-
PVT (Position-Velocity-Time)
- 上位机下发一系列段点(目标位置、段末速度、执行时间)。
- 驱动内部用样条插补,保证段间速度连续。
- 应用:数控加工、激光切割、点胶轨迹。
-
PT (Position-Time)
- 上位机只下发目标位置+时间。
- 驱动自动生成速度曲线。
- 应用:简单点到点轨迹,但平滑度不如 PVT。
CiA402 控制模式功能对比表
| 模式 | 中文名称 | 输入数据 | 轨迹生成位置 | 优点 | 缺点 | 典型应用场景 |
|---|---|---|---|---|---|---|
| PP (Profile Position) | 点到点位置模式 | 目标位置 + 配置的速度/加速度 | 驱动内部生成 S 曲线或梯形曲线 | 简单易用;只需目标位置;适合定位 | 不能做多轴插补;灵活性差 | Pick & Place、输送带对位、点到点搬运 |
| PV (Profile Velocity) | 点到点速度模式 | 目标速度 + 加速度参数 | 驱动内部生成速度曲线 | 适合恒速、张力控制;实现简单 | 位置不可控;轨迹精度差 | 卷绕、送料、输送线 |
| PT (Profile Torque) | 点到点力矩模式 | 目标力矩/电流 | 驱动直接控制电流环 | 可实现力控/张力;直接简单 | 无位置信息;需外环控制 | 压装、张力控制、柔性夹持 |
| HM (Homing) | 回零模式 | 回零方法选择 | 驱动内部执行 | 自动寻找机械零点;标准化 | 仅用于初始化 | 机械零点校准、开机复位 |
| CSP (Cyclic Synchronous Position) | 周期同步位置模式 | 每周期目标位置(带时间戳) | 上位机做轨迹规划;驱动跟随 | µs 级同步精度;适合机器人/CNC;灵活 | 上位机计算压力大;通信负担重 | CNC 插补、机器人多轴协调、AGV 路径跟随 |
| CSV (Cyclic Synchronous Velocity) | 周期同步速度模式 | 每周期目标速度 | 上位机生成速度;驱动积分位置 | 通信量小于 CSP;适合卷绕/输送 | 轨迹精度较差;同步性低于 CSP | 卷绕、恒速输送、电子齿轮从轴 |
| CST (Cyclic Synchronous Torque) | 周期同步力矩模式 | 每周期目标力矩 | 上位机决定力矩;驱动执行电流环 | 高速力控;适合机器人柔顺、压装 | 不控制位置;需外部环路 | 力控、打磨、装配、柔顺机器人 |
| PVT (Position-Velocity-Time) | 位置-速度-时间插补模式 | 一系列段点(位置+末速度+时间) | 驱动内部样条/多项式插补 | 平滑度高;抗抖动;上位机负担小 | 段内难以修改轨迹;依赖驱动能力 | 数控加工、激光切割、点胶轨迹 |
| PT (Position-Time) | 位置-时间插补模式 | 一系列段点(位置+时间) | 驱动内部线性或简单插补 | 数据量小,易实现;适合简单轨迹 | 速度连续性差;平滑度不如 PVT | 点到点定位、低速轨迹 |
“实时性需求” 与 “上位机负担”
Interpolated Position (IP) 模式详解
1. 定义
- IP 模式(Interpolated Position Mode)是 CiA-402 驱动配置文件里的一种运动模式。
- 它允许上位机(主控制器)周期性地发送一组轨迹点(插补数据),由驱动器在点与点之间进行插值运算,从而生成平滑的运动轨迹。
- 这是 CANopen/EtherCAT 等总线中,解决 带宽有限 与 轨迹平滑 需求的重要手段。
2. 数据结构
在 CiA-402 中,IP 模式通常对应对象字典 0x60C1h、0x60C2h 等。
轨迹点可以有两种常见格式:
PT(Position–Time)格式
-
每个点包含:
- 目标位置 (Position)
- 段时间 Δt (Time)
-
驱动器根据段时间与目标位置,自动生成速度曲线。
👉 优点:数据量小,实现简单。
👉 缺点:段间速度可能不连续,轨迹平滑性不如 PVT。
PVT(Position–Velocity–Time)格式
-
每个点包含:
- 目标位置 (Position)
- 段末速度 (Velocity)
- 段时间 Δt (Time)
-
驱动器根据 (位置+末速度+时间) 做多项式插补(通常三次样条),保证段间速度连续。
👉 优点:轨迹连续、平滑度高。
👉 缺点:数据量大,规划算法稍复杂。
3. 工作机制
- 上位机(如 STM32F405) 先做好轨迹规划 → 生成一系列 PVT 或 PT 点。
- 周期性通过 PDO(过程数据对象) 或 SDO(服务数据对象) 下发到驱动器的缓冲区(FIFO)。
- 驱动器内部以**更高频率(2–8 kHz)**进行插补,保证平滑的电机运动。
- 主控保持一定的前瞻缓冲(100–200 ms),避免驱动断流。
- 驱动器若 FIFO 低水位或出错,会通过状态字/错误码上报。
4. 特点
- 带宽友好:相比 CSP 每 1 ms 下发一个点,IP 模式可以 10–20 ms 下发一个段,大幅减少 CAN 总线负载。
- 鲁棒性高:即使短时通信丢帧,驱动器还能继续执行 FIFO 内剩余轨迹,不会立即停顿。
- 平滑性好:PVT 轨迹能保证速度连续,适合数控加工/点胶/激光切割。
- 延迟可控:前瞻越多,抗干扰越强,但实时性降低。
5. 典型应用场景
- 数控机床 (CNC):刀具轨迹控制。
- 机器人轨迹:多关节曲线运动。
- 点胶/喷涂/激光切割:需要高轨迹平滑性。
- 包装/印刷:飞剪、跟随切割。
6. 与其他模式对比
| 模式 | 数据输入 | 插补位置 | 优点 | 缺点 |
|---|---|---|---|---|
| CSP | 每周期目标位置 | 控制器规划 | 实时同步精度高 | 总线带宽压力大,容错差 |
| IP (PT/PVT) | 一系列段点 (位置/时间/速度) | 驱动内部 | 带宽友好,轨迹平滑,容错好 | 实时性低于 CSP,段内不可改 |
| PP | 单目标位置 | 驱动内部 | 简单,点到点定位 | 无法连续轨迹 |
✅ 总结一句话:
Interpolated Position (IP) 模式 = 上位机负责规划“路标”,驱动负责在路标间自动补全轨迹。
在 CANopen + STM32F405 这种资源有限的场景下,IP 模式(尤其是 PVT 格式)是最实用、最稳妥的插补方式。
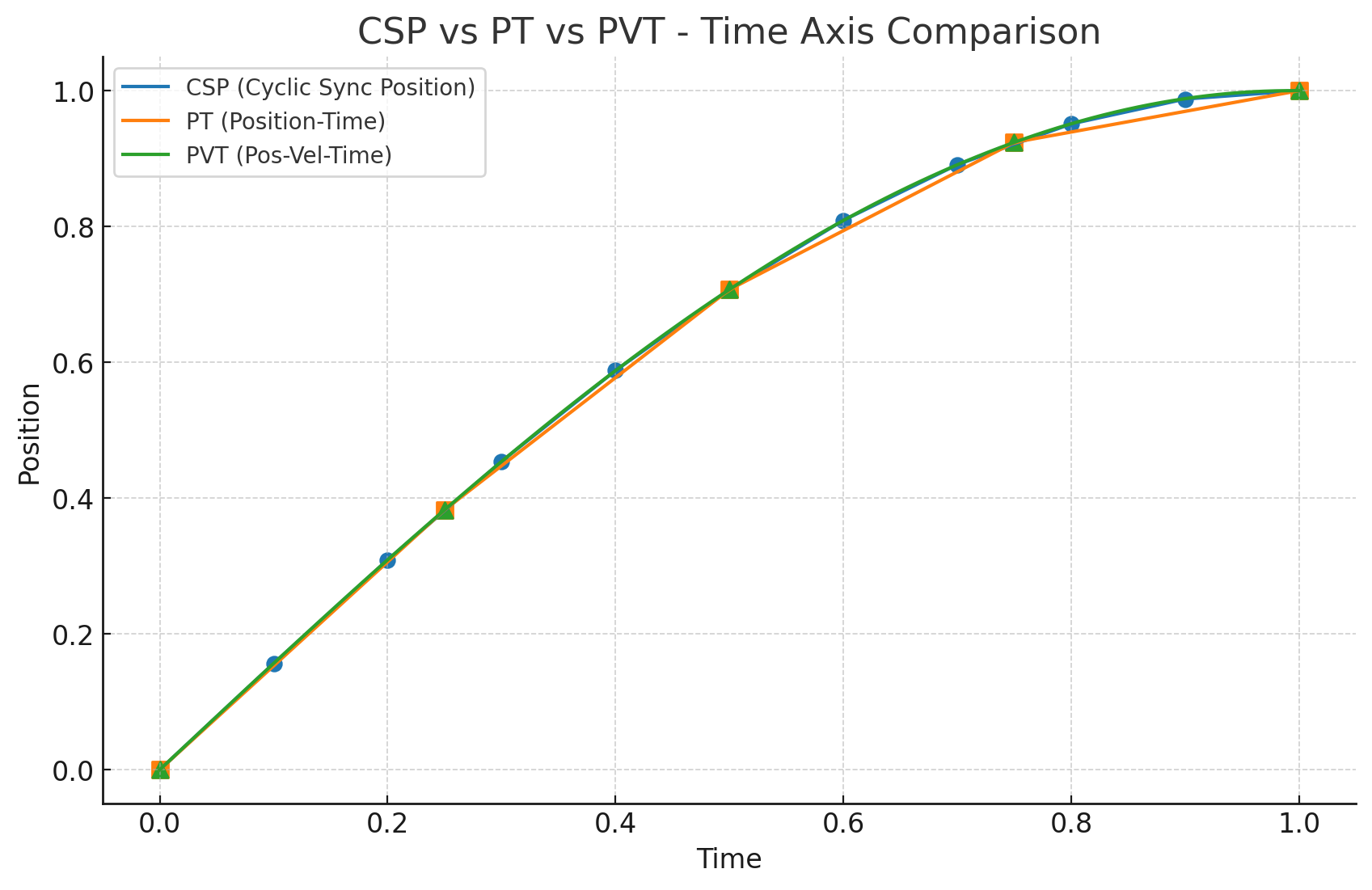
CSP vs PT vs PVT 时间轴对比图
-
CSP(蓝色折线)
- 每 1 ms 下发一个目标点,驱动只是“跟随”。
- 优点:实时性高,精确同步。
- 缺点:总线压力大,抗通信抖动差。
-
PT(橙色折线)
- 每个段点只包含“位置+时间”,驱动在两点间做线性插补。
- 优点:实现简单,数据量小。
- 缺点:段间速度不连续,轨迹有“折角”。
-
PVT(绿色曲线)
- 段点包含“位置+末速度+时间”,驱动做多项式/样条插补。
- 优点:段间速度连续,轨迹平滑。
- 缺点:数据量比 PT 大,上位机规划稍复杂。
👉 直观上:
- CSP = 高分辨率折线(通信压力大)。
- PT = 分段直线(简单但不平滑)。
- PVT = 平滑曲线(最接近真实轨迹)。
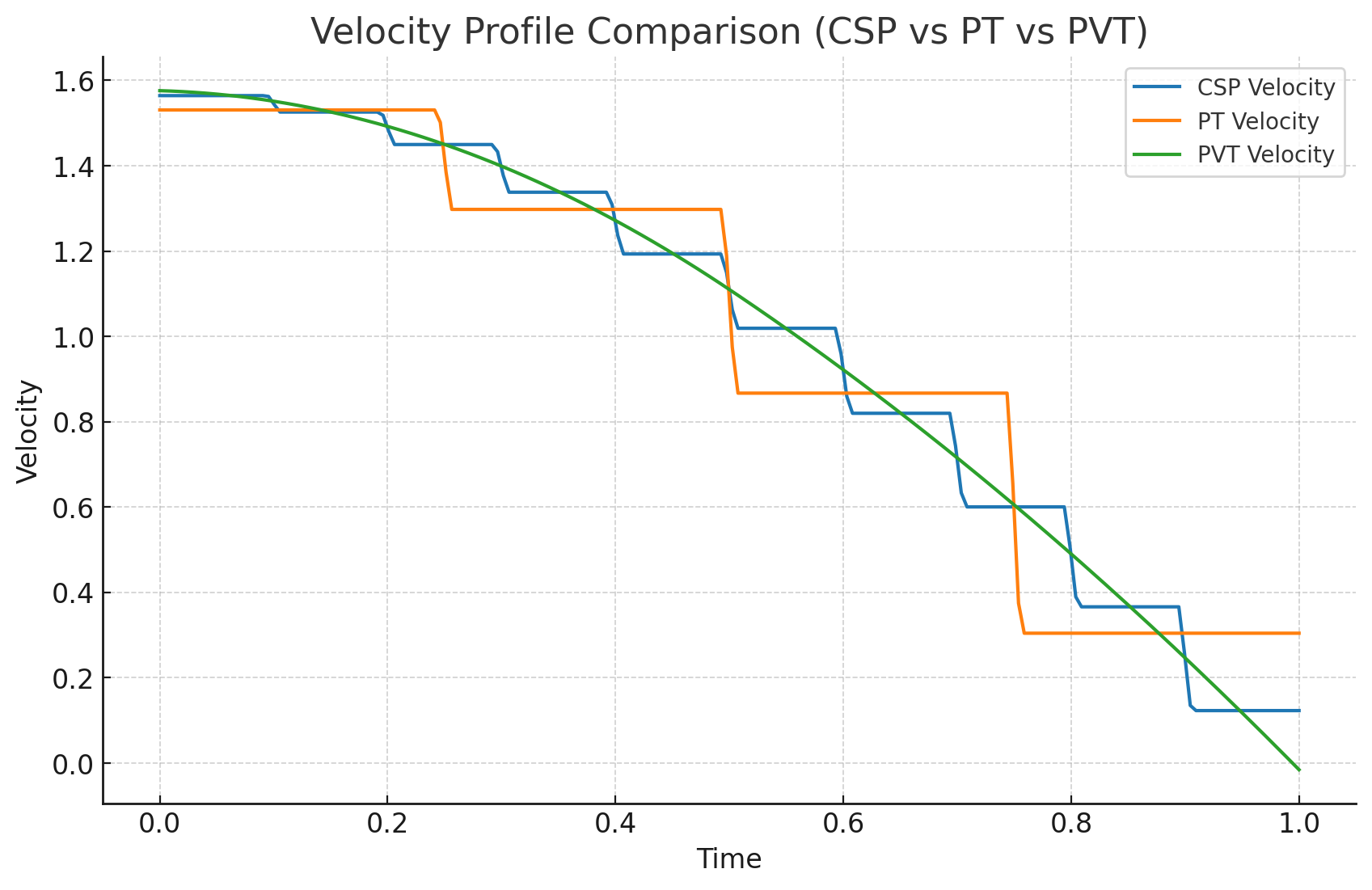
CSP vs PT vs PVT 速度曲线对比图
-
CSP (蓝色)
- 速度曲线呈“锯齿状”,因为每 1 ms 下发位置点,驱动只是跟随 → 数值差分导致速度抖动大。
-
PT (橙色)
- 段内速度恒定,段与段之间出现速度跳变 → 轨迹不连续,容易产生机械冲击。
-
PVT (绿色)
- 速度曲线平滑连续,段间无跳变 → 轨迹自然流畅,最适合高精度插补。
👉 结论:
- CSP:高精度但对通信要求极高,速度曲线容易抖动。
- PT:实现简单,但速度曲线不连续。
- PVT:速度连续性最好,兼顾带宽和轨迹平滑。
CSP vs PT vs PVT 的加速度曲线对比图
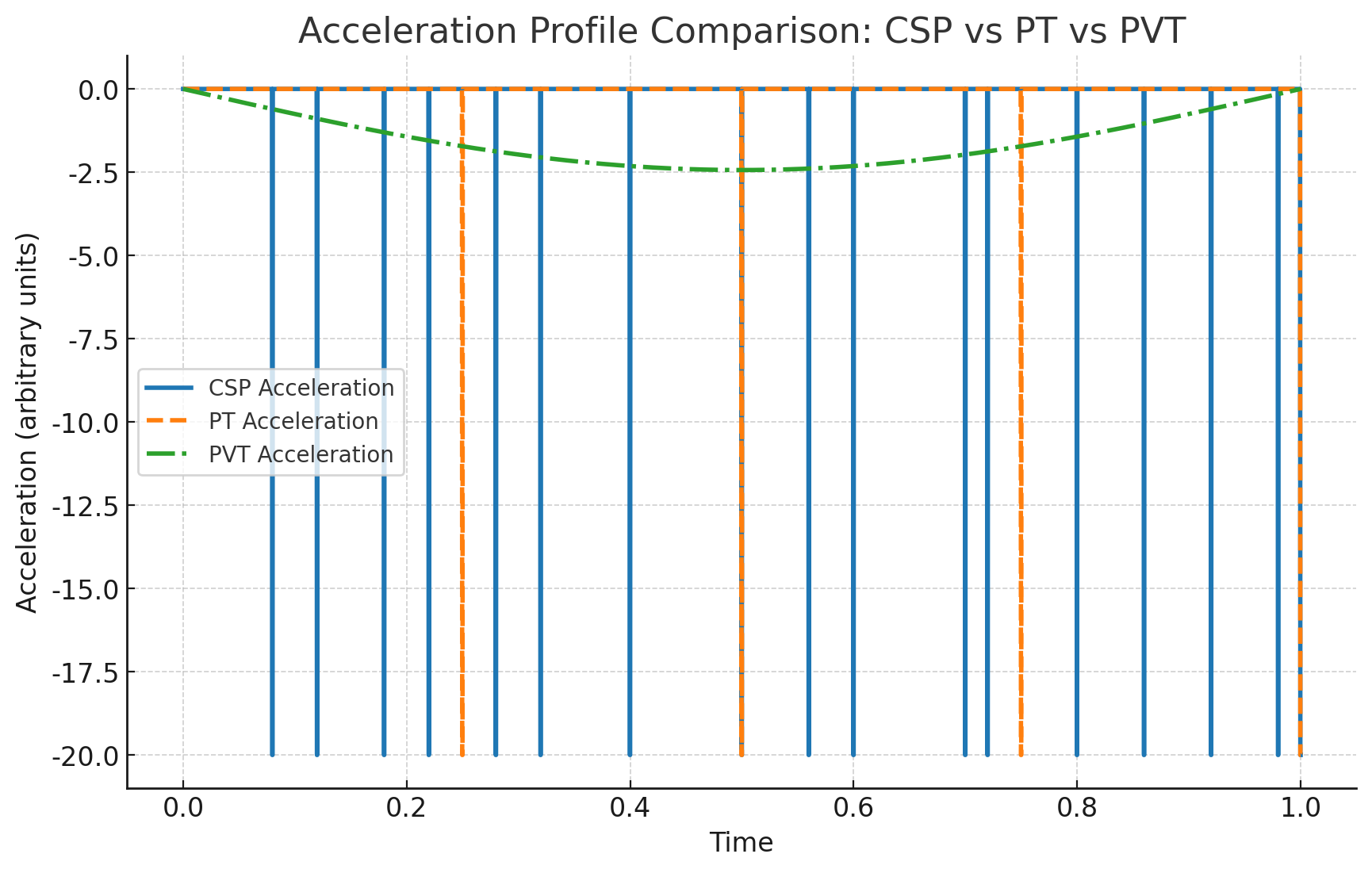
CSP 为多级小台阶、PT 为少量大台阶、PVT 为平滑曲线
- CSP:速度是很多小阶梯 → 加速度表现为密集且幅值较小的负脉冲(图中蓝色竖条),每次目标速度更新会出现一次尖峰。
- PT:速度在段边界发生较大跳变 → 加速度是少量但幅值更大的脉冲(橙色虚线竖条),段与段之间不连续。
- PVT:速度连续并按样条平滑变化 → 加速度连续且平滑(绿色点划线),机械冲击最小。
CSP vs CSV 的速度曲线对比图
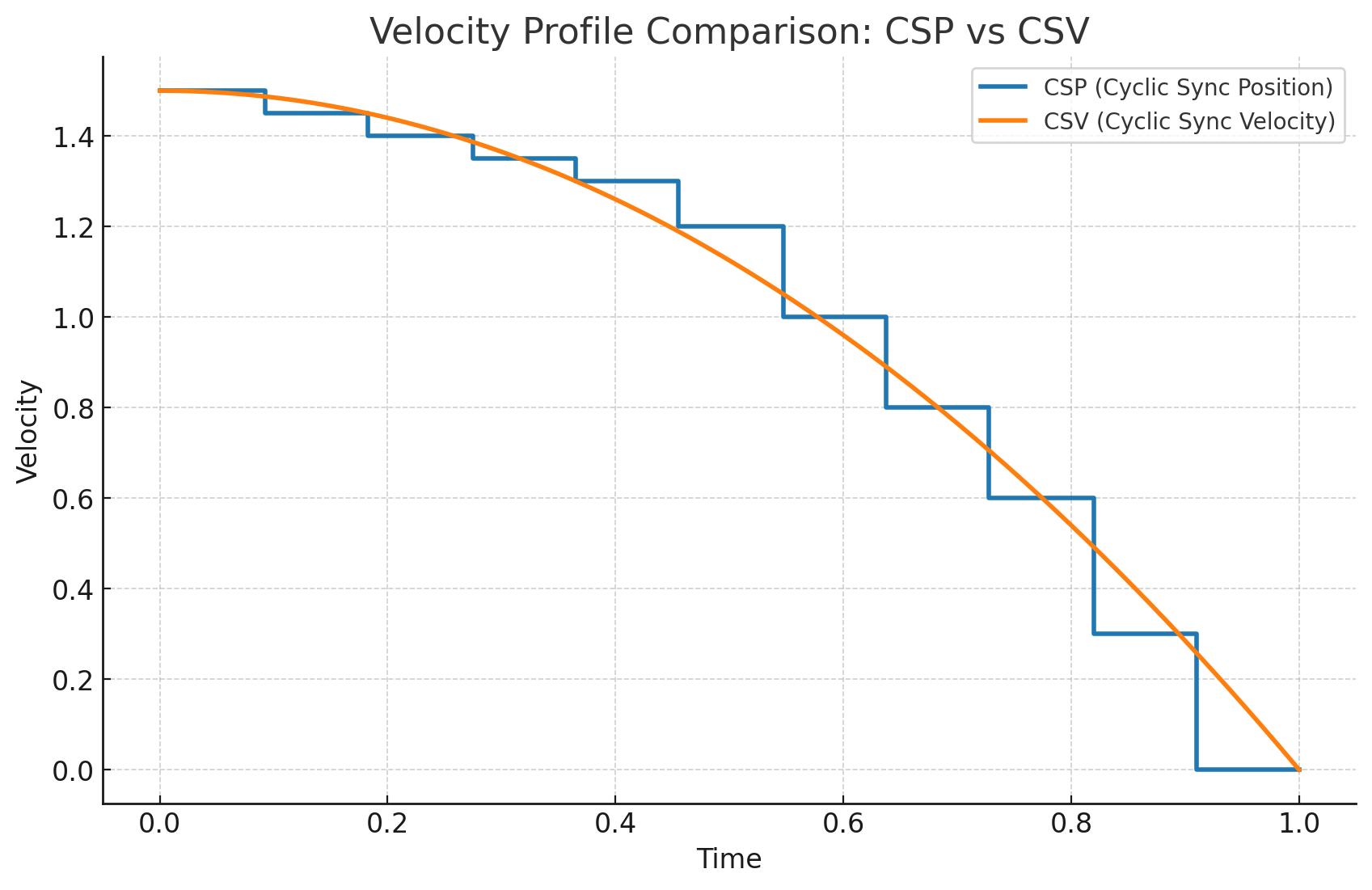
-
CSP
- 主站下发的是 位置点,驱动器根据采样周期计算出速度。
- 速度表现为一阶一阶的小台阶,存在明显的离散化。
- 特点:精确的多轴同步,实时性强,但对带宽和时钟同步要求高。
-
CSV
- 主站直接下发的是 速度设定值,驱动内部积分得到位置。
- 速度曲线是连续的、可直接光滑控制。
- 特点:带宽压力较小,控制平滑,但多轴同步精度略低于 CSP。
CSP vs CSV 的加速度对比图
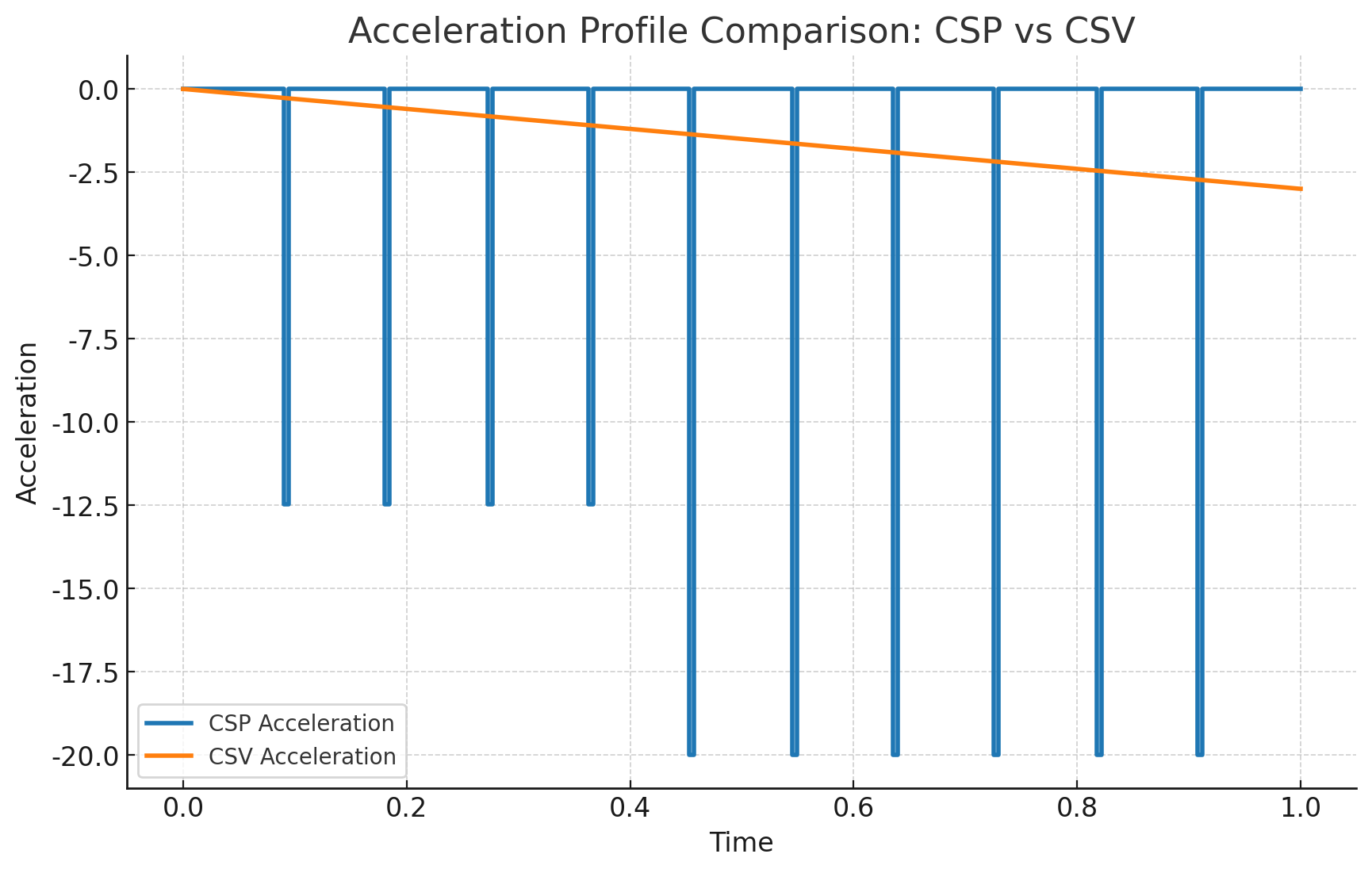
-
CSP (Cyclic Synchronous Position)
- 因为位置点是周期性小步进更新,速度呈阶梯 → 加速度表现为密集脉冲尖峰。
- 每个 1 ms(或设定周期)都会有突变,加速度曲线非常“抖”。
- 特点:轨迹精确,但对机械系统冲击大,需要高带宽+滤波补偿。
-
CSV (Cyclic Synchronous Velocity)
- 主控直接下发平滑速度 → 驱动内部积分为位置。
- 加速度曲线平滑连续,几乎没有尖峰。
- 特点:运动更柔和,适合连续速度控制,但多轴同步精度略逊于 CSP。
要不要我再画一张 CSP vs CSV 的位置曲线对比图,这样三个维度(位置-速度-加速度)就能完整对照?
四、厂商扩展的高级模式
在 CiA402 基础上,各厂商还扩展了:
- 电子齿轮 (Electronic Gear):从轴按主轴比例运动。
- 电子凸轮 (Electronic Cam):从轴根据主轴位置查表运行,适合飞剪、包装。
- NC 模式/路径下载:直接下载 G-code / NC 轨迹,驱动内置轨迹生成器。
- 复合模式 (Hybrid):叠加位置+力矩,实现柔顺控制。
五、应用场景选型
| 场景 | 推荐模式 | 推荐总线 |
|---|---|---|
| 点到点定位 (Pick & Place) | PP | CANopen / EtherCAT |
| 恒速输送 / 卷绕 | PV / CSV | CANopen (低速) / EtherCAT (高速) |
| 压装 / 力控 | PT / CST | EtherCAT |
| 机器人 / CNC | CSP | EtherCAT |
| 高速轨迹加工 | PVT | EtherCAT / CANopen |
| 包装 / 飞剪 | Cam / Gear | EtherCAT / CANopen |
六、总结
- CiA402 是一个跨总线的驱动设备标准,定义了统一的对象字典、状态机和控制模式。
- Profile 模式:点到点,适合简单定位。
- Homing:回零。
- Cyclic Synchronous 模式:高实时性,适合机器人、数控。
- PVT/PT 插补模式:驱动内部插值,适合复杂轨迹加工。
- 扩展模式:电子齿轮、电子凸轮、NC 插补。
👉 工程实践中:
- EtherCAT 常用于 CSP/CSV/CST(高实时性)。
- CANopen 常用于 PP/PV/PT/PVT(成本敏感、低速应用)。