具身智能3全身动力学控制软件包(人形机器人)摘自Openloong社区
系统介绍
易于部署,
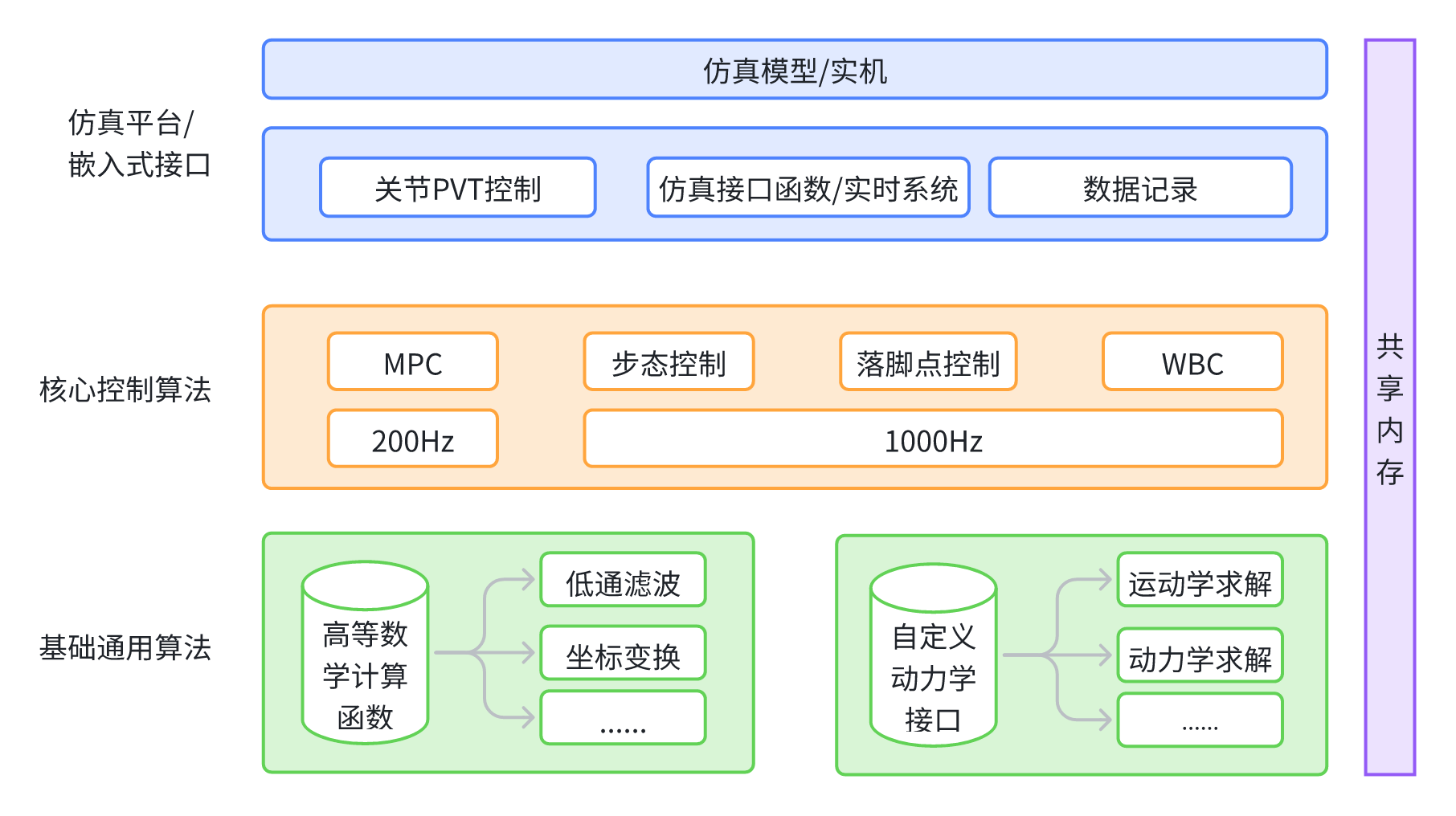
易于理解,人形控制框架结构采用分层模块化设计,提高了系统的可维护性和可扩展性。
易于分层结构,遵循功能模块封装的代码设计原则,采用总线进行模块之间的数据交互,减少封装冗余,有利于降低代码复杂度;算法实现采用“读-计算-写”的简单逻辑,提高了代码的可读性。
功能模块
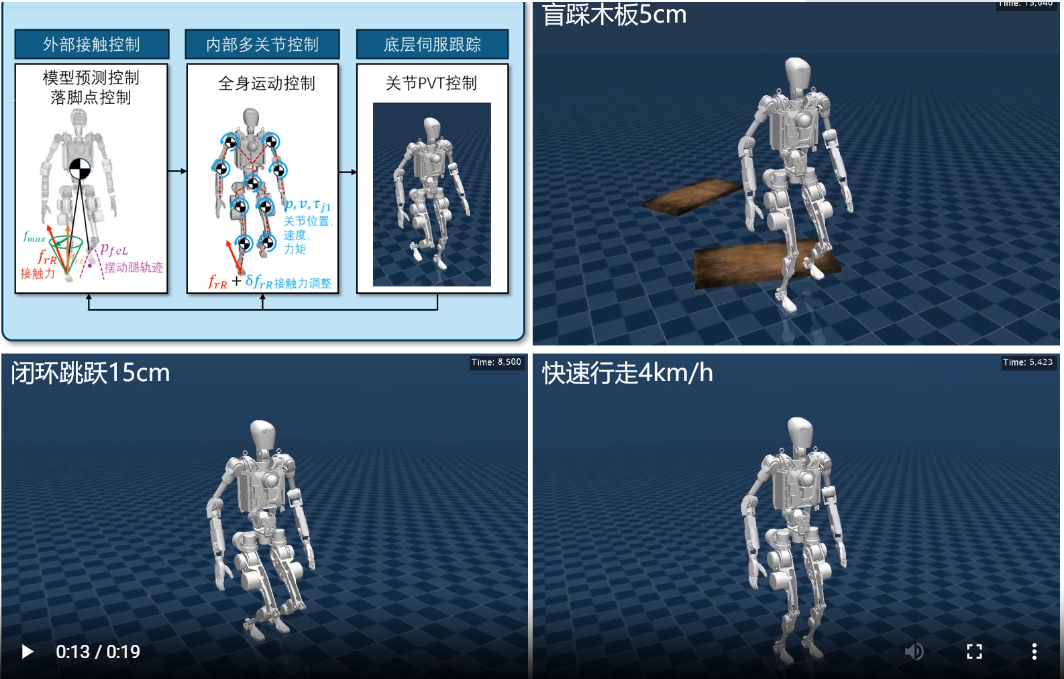
模型预测+全身动力学控制
易于部署,
易于理解,人形控制框架结构采用分层模块化设计,提高了系统的可维护性和可扩展性。
易于分层结构,遵循功能模块封装的代码设计原则,采用总线进行模块之间的数据交互,减少封装冗余,有利于降低代码复杂度;算法实现采用“读-计算-写”的简单逻辑,提高了代码的可读性。