CW32L011_电机驱动器开发板试用
CW32L011_电机驱动器开发板(BLDC/PMSM_Square Wave/FOC Driver电机驱动)
- 硬件参数
- 外观
- 参数
- 接口
- 定义
- 接线说明
- 软件
- 使用记录
- 有感
- 视频
- 无感
- 视频
硬件参数
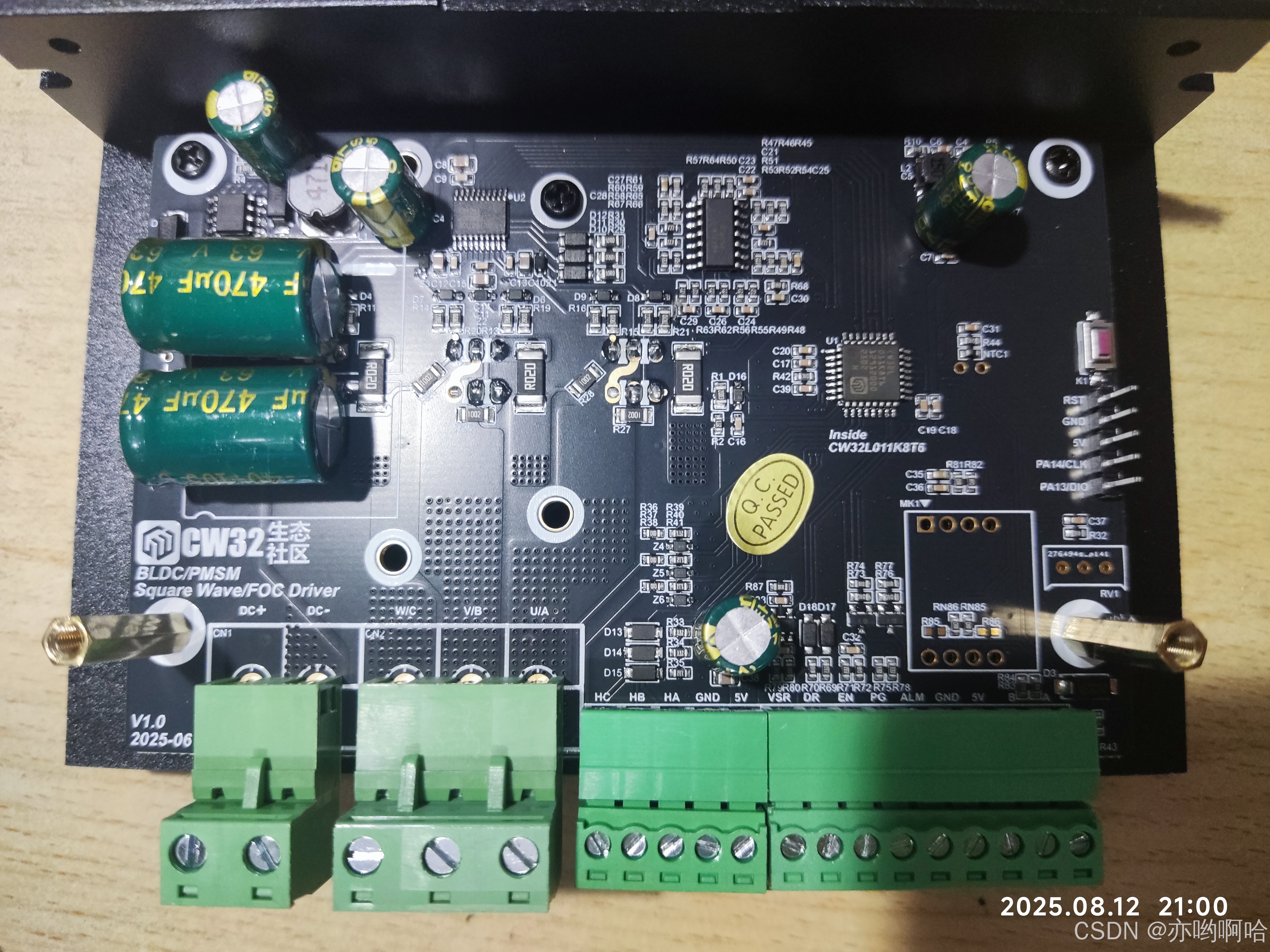
外观


参数
主控MCU:CW32L011K8T6 LQFP32(7*7),ARM® Cortex®-M0+内核, 最高主频 96MHz;
PCBA尺寸、工艺:7.4 * 11.6 cm 黑色沉金;
驱动能力:12~72V 800W MAX; 请注意所选用电容\MOS参数是否支持;建议48V以内使用;大功率使用建议安装散热器;
硬件支持有感/无感方波/FOC驱动;
初次调试建议使用12~24V供电的有霍尔的BLDC电机;使用带保护的可调电源,做好限流保护策略;
接口
定义
| 名称 | 说明 |
|---|---|
| DC+,DC- | 直流电源输入,24V。不能接反 |
| U,V,W | 无刷电机相线(霍尔版务必与霍尔线同时正确接线;无霍尔:随便接) |
| HA,HB,HC | 霍尔信号线。无霍尔时,悬空。 |
| H+,H- | 霍尔电源。无霍尔时,悬空。 |
| VE | 外接调速信号输入(标准出货为:0 ~ 5V) |
| DR | 方向控制;悬空或接GND低电平表示方向 |
| EN | 使能,悬空时运行,与GND短接时停止运行。 |
| PG | 速度反馈信号,频率可根据需要程序中调节. |
| ALM | 预留报警输出信号。 |
| GND | GND。 |
| 5V | 5V。 |
| A、B | 预留485通讯接口或TTL通讯接口。 |
接线说明
- 正、负极:电源输入
直流电源输入,通常采用开关或线性电源供电,不可接反。 - U,V,W:电机三相线
直流无刷电机三根相线。使用霍尔时,务必与霍尔(120度)配对正确接线。 - HA,HB,HC:霍尔(Hall)信号线
无霍尔模式运行时,此信号可不接入。霍尔(120度)模式运行时,必须与相项配对正确接线。 - H+、H-:霍尔/信号电源
霍尔供电电源。 - VE:外部调速信号输入
外接调速信号输入。
支持外接10K电位器或模拟电压(<5V)调速。当外接电位器时,VE对应电位器中间脚,5V、GND对应连接电位器的两边脚。 - DR:电机运转方向控制
正反转方向控制端口。端口控制模式时,悬空或高电平时为正转,低电平反转。
外部接线如下图所示。
当K合上(DR为低电平),电机方向切换为反转。当K断开(DR为高电平),电机方向为正转。 - EN:使能信号。悬空时运行,接GND时停止运行
用户可通过控制驱动器EN端子来控制电机的起动或停止(或刹车)。
外部接线如下图所示。
[图片]
当K合上(EN为低电平),电机停止运行。当K断开(EN为高电平),电机启动运行。 - PG:电机转速反馈输出
速度反馈信号。 此信号与电机转速成正比,PG频率与霍尔换相频率正成比。 - ALM:预留报警、故障信号输出接口
- A,B:预留485通讯接口。
软件
官方提供示例程序
使用记录
有感
由于作者手里目前没有电位器,所以改了一下官方的程序,在Debug中修改目标转速(不建议新手这么操作,容易损坏硬件,可以直接将“SetSpeed1”设置一个目标转速),实现电机转动
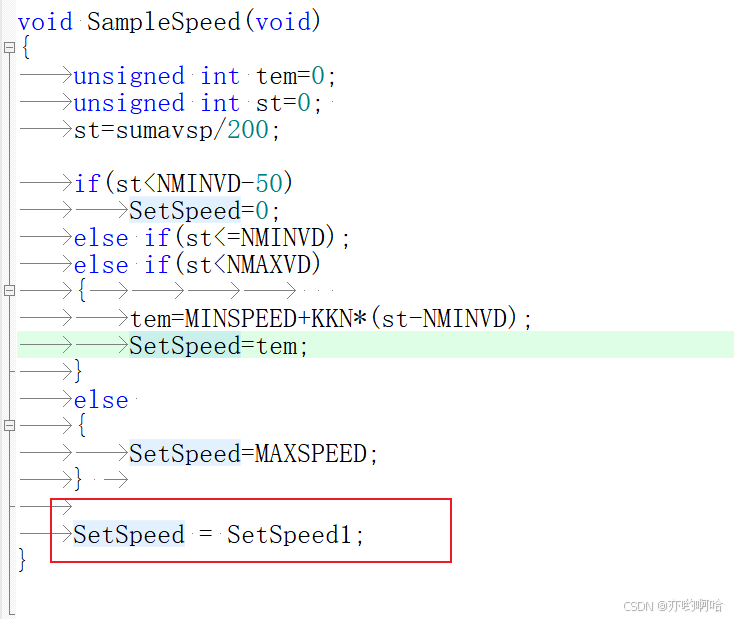
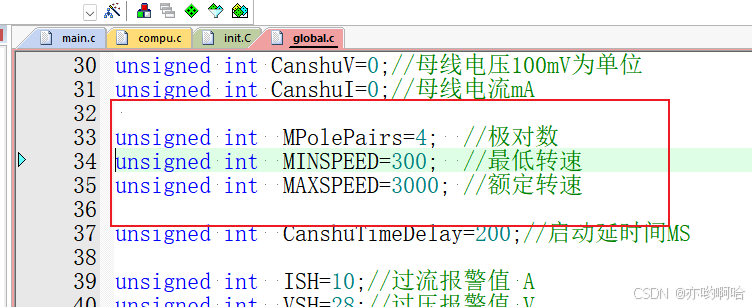
还需要修改一下自己电机的基本参数。
视频
CW32L011_电机驱动器开发板 120°霍尔
作者修改后代码(120°霍尔)
无感
由于作者手里目前没有电位器,跟无感的一样改了一下官方的程序(方法跟有感类似),实现电机转动。
视频
CW32L011_电机驱动器开发板 无感驱动
作者修改后代码(无感)