【完整源码+数据集+部署教程】植物病害检测系统源码和数据集:改进yolo11-RFAConv
背景意义
研究背景与意义
随着全球农业生产的不断发展,植物病害的监测与管理已成为保障粮食安全和提高农业产量的重要环节。植物病害不仅影响作物的生长和产量,还可能对生态环境造成严重影响。因此,及时、准确地识别和分类植物病害,对于制定有效的防治措施至关重要。传统的植物病害检测方法多依赖于人工观察和经验判断,效率低下且容易受到主观因素的影响。近年来,计算机视觉技术的快速发展为植物病害检测提供了新的解决方案,尤其是基于深度学习的目标检测算法在图像识别领域表现出色。
本研究旨在基于改进的YOLOv11模型,构建一个高效的植物病害检测系统。我们将利用一个包含4100张图像的数据集,该数据集涵盖了三种植物病害类别:早期枯萎、健康状态和晚期枯萎。这些类别的细致划分为模型的训练和评估提供了良好的基础。通过对这些图像的深度学习训练,系统能够自动识别和分类不同类型的植物病害,从而为农民和农业管理者提供及时的决策支持。
此外,随着数据集的不断丰富和模型的持续优化,基于YOLOv11的植物病害检测系统将具备更强的适应性和准确性。该系统不仅能够提高病害检测的效率,还能减少人工成本,推动农业智能化的发展。通过将先进的计算机视觉技术应用于植物病害检测,我们希望能够为农业生产提供更为科学和高效的解决方案,促进可持续农业的发展。
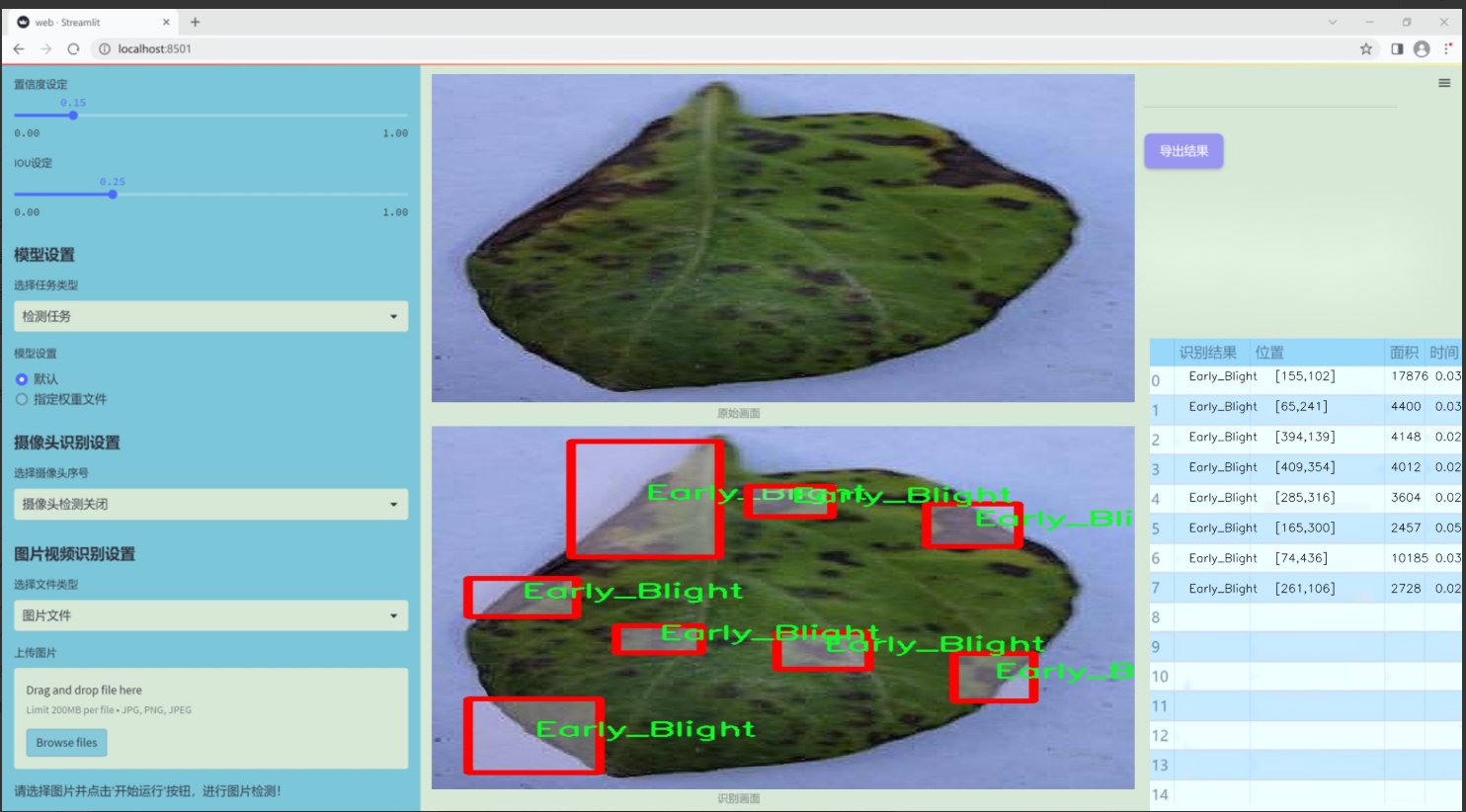
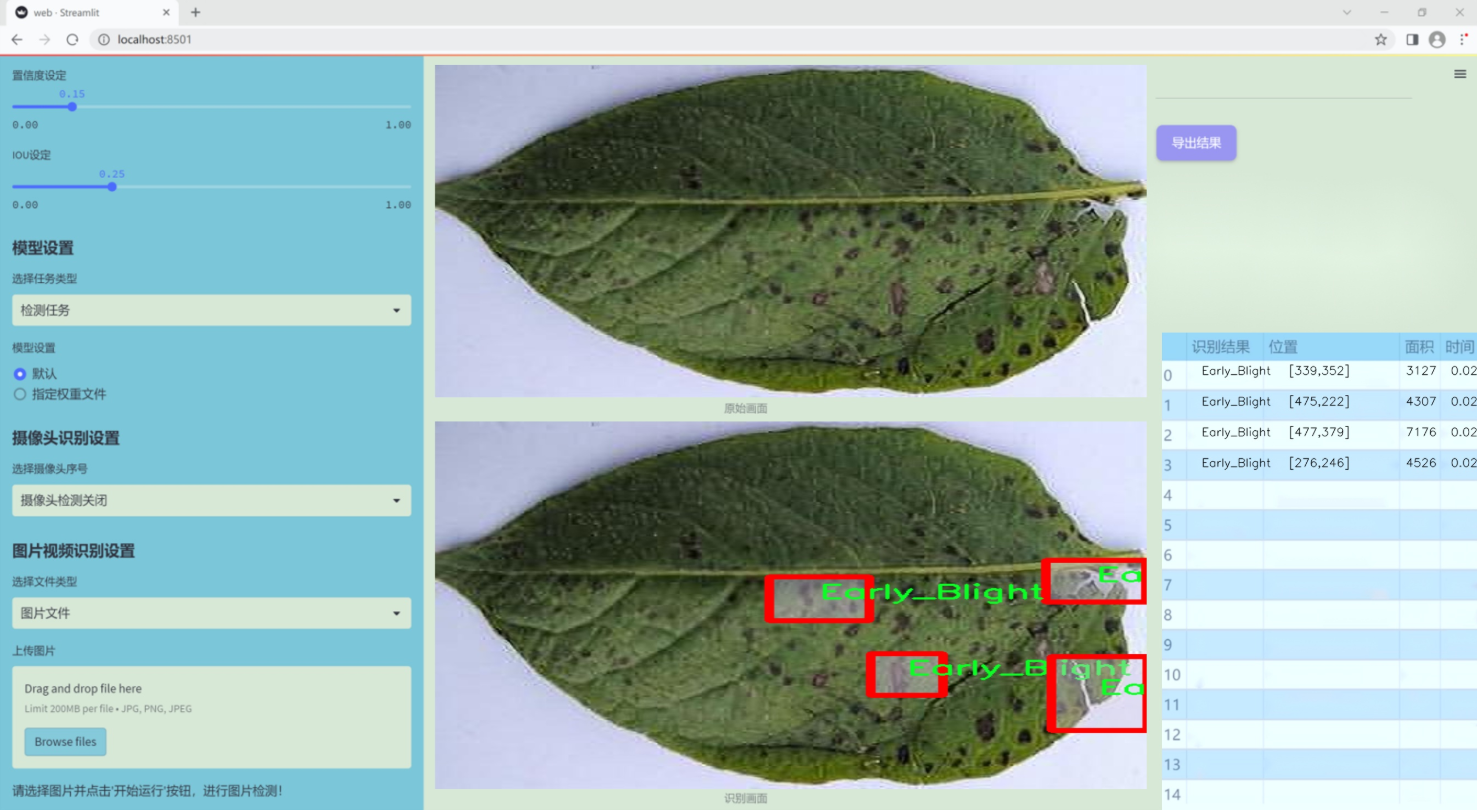
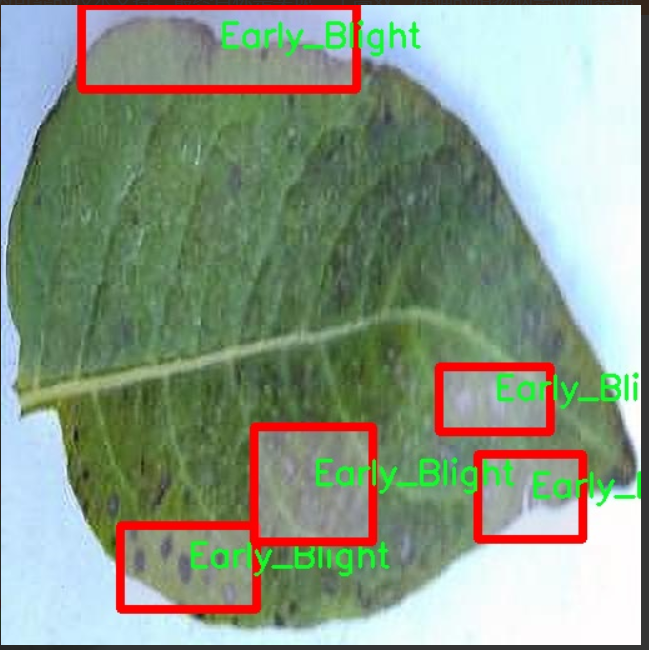
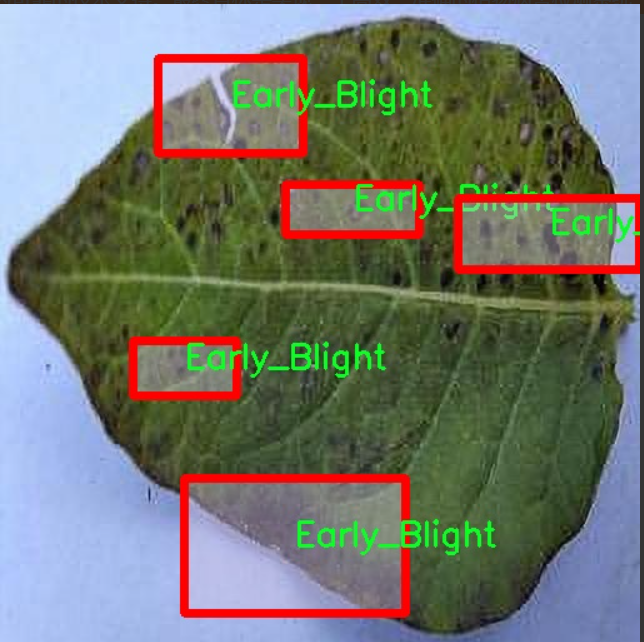
图片效果

数据集信息
本项目数据集信息介绍
本项目旨在改进YOLOv11的植物病害检测系统,所使用的数据集专注于植物病害的识别与分类,特别是针对“早期枯萎病”和“晚期枯萎病”这两种病害的研究。数据集包含三类主要类别,分别为“Early_Blight”(早期枯萎病)、“Healthy”(健康植物)和“Late_Blight”(晚期枯萎病),总类别数量为三。数据集的构建过程涵盖了大量的植物图像,这些图像来源于不同的生长环境和气候条件,以确保模型的泛化能力和鲁棒性。
在数据采集阶段,我们注重选择不同生长阶段的植物样本,特别是早期和晚期枯萎病的表现,以便于模型能够有效识别出病害的早期症状和后期发展状态。每个类别的图像均经过精心标注,确保数据的准确性和一致性。这些图像不仅包括健康植物的特征,还涵盖了不同程度的病害表现,帮助模型学习到病害的多样性和复杂性。
此外,为了提高模型的训练效果,我们还进行了数据增强处理,包括旋转、缩放、翻转等操作,增加了数据集的多样性,从而提高模型在实际应用中的表现。通过使用这个精心构建的数据集,我们期望能够显著提升YOLOv11在植物病害检测中的准确性和效率,为农业生产提供更为可靠的技术支持。最终目标是实现一个高效、准确的植物病害检测系统,帮助农民及时识别和处理植物病害,从而提高作物产量和质量。
核心代码
以下是提取出的核心代码部分,并附上详细的中文注释:
import torch
import torch.nn as nn
import numpy as np
class Mlp(nn.Module):
“”“多层感知机(MLP)模块”“”
def init(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().init()
out_features = out_features or in_features # 输出特征数
hidden_features = hidden_features or in_features # 隐藏层特征数
self.fc1 = nn.Linear(in_features, hidden_features) # 第一层线性变换
self.act = act_layer() # 激活函数
self.fc2 = nn.Linear(hidden_features, out_features) # 第二层线性变换
self.drop = nn.Dropout(drop) # Dropout层
def forward(self, x):"""前向传播"""x = self.fc1(x) # 线性变换x = self.act(x) # 激活x = self.drop(x) # Dropoutx = self.fc2(x) # 线性变换x = self.drop(x) # Dropoutreturn x
class CSWinBlock(nn.Module):
“”“CSWin Transformer的基本块”“”
def init(self, dim, num_heads, mlp_ratio=4., drop=0., attn_drop=0.):
super().init()
self.dim = dim # 输入特征维度
self.num_heads = num_heads # 注意力头数
self.mlp_ratio = mlp_ratio # MLP的隐藏层比率
self.qkv = nn.Linear(dim, dim * 3) # 线性变换用于生成Q、K、V
self.norm1 = nn.LayerNorm(dim) # 归一化层
# 注意力层self.attn = LePEAttention(dim, num_heads=num_heads, attn_drop=attn_drop)# MLP层mlp_hidden_dim = int(dim * mlp_ratio) # 隐藏层维度self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, out_features=dim, drop=drop)self.norm2 = nn.LayerNorm(dim) # 归一化层def forward(self, x):"""前向传播"""img = self.norm1(x) # 归一化qkv = self.qkv(img).reshape(x.shape[0], -1, 3, self.dim).permute(2, 0, 1, 3) # 生成Q、K、Vx = self.attn(qkv) # 注意力计算x = x + self.drop_path(x) # 残差连接x = x + self.drop_path(self.mlp(self.norm2(x))) # MLP和残差连接return x
class CSWinTransformer(nn.Module):
“”“CSWin Transformer模型”“”
def init(self, img_size=640, in_chans=3, num_classes=1000, embed_dim=96, depth=[2,2,6,2], num_heads=12):
super().init()
self.num_classes = num_classes
self.embed_dim = embed_dim # 嵌入维度
# 第一阶段的卷积嵌入self.stage1_conv_embed = nn.Sequential(nn.Conv2d(in_chans, embed_dim, 7, 4, 2), # 卷积层nn.LayerNorm(embed_dim) # 归一化层)# 各个阶段的CSWinBlockself.stage1 = nn.ModuleList([CSWinBlock(dim=embed_dim, num_heads=num_heads) for _ in range(depth[0])])# 其他阶段的构建省略...def forward(self, x):"""前向传播"""x = self.stage1_conv_embed(x) # 卷积嵌入for blk in self.stage1:x = blk(x) # 通过每个CSWinBlockreturn x
示例用法
if name == ‘main’:
inputs = torch.randn((1, 3, 640, 640)) # 随机输入
model = CSWinTransformer() # 创建模型
res = model(inputs) # 前向传播
print(res.size()) # 输出结果的尺寸
代码注释说明:
Mlp类:实现了一个简单的多层感知机,包括两个线性层和一个激活函数。使用Dropout来防止过拟合。
CSWinBlock类:实现了CSWin Transformer的基本块,包含注意力机制和MLP。使用残差连接来提高模型的训练效果。
CSWinTransformer类:实现了整个CSWin Transformer模型,包含多个阶段的卷积嵌入和CSWinBlock。前向传播方法中依次通过各个模块进行处理。
示例用法:创建模型并进行一次前向传播,输出结果的尺寸。
以上是对代码的核心部分进行了提取和详细注释,便于理解其结构和功能。
这个程序文件 CSWinTransformer.py 实现了 CSWin Transformer 模型,这是一个用于计算机视觉任务的深度学习模型。该模型结合了卷积神经网络(CNN)和自注意力机制,旨在提高图像分类等任务的性能。
首先,文件中导入了必要的库,包括 PyTorch 和一些辅助函数。模型的主要组成部分包括 Mlp(多层感知机)、LePEAttention(局部增强自注意力)、CSWinBlock(CSWin 模块)以及 CSWinTransformer(整个模型)。这些组件共同构成了 CSWin Transformer 的架构。
Mlp 类定义了一个简单的多层感知机,包含两个线性层和一个激活函数(默认为 GELU),同时支持 dropout。LePEAttention 类实现了局部增强自注意力机制,它通过将输入图像划分为窗口来进行注意力计算,并且支持多头注意力。该类的 forward 方法实现了查询、键、值的计算和注意力的应用。
CSWinBlock 类是 CSWin Transformer 的基本构建块,它包含了注意力层和 Mlp 层,并且支持残差连接和层归一化。该模块根据输入的分辨率和分支数量选择适当的注意力机制,并在最后阶段进行特定的处理。
CSWinTransformer 类则是整个模型的实现,包含了多个阶段,每个阶段由多个 CSWinBlock 组成。模型的输入通过卷积层进行嵌入,然后经过多个 CSWinBlock 和合并模块,逐步提取特征。模型支持不同的深度和宽度配置,允许用户根据需求调整。
此外,文件中还定义了一些辅助函数,如 img2windows 和 windows2img,用于在图像和窗口之间进行转换。Merge_Block 类用于在不同阶段之间合并特征。
最后,文件提供了几个函数(如 CSWin_tiny、CSWin_small、CSWin_base 和 CSWin_large)用于创建不同规模的 CSWin Transformer 模型,并支持加载预训练权重。主程序部分演示了如何创建这些模型并对随机输入进行前向传播,输出各层的特征图尺寸。
整体而言,这个文件实现了一个灵活且强大的视觉 Transformer 模型,适用于各种计算机视觉任务。
10.4 head.py
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn as nn
import torch.nn.functional as F
from ultralytics.utils.tal import dist2bbox, make_anchors
class Detect_DyHead(nn.Module):
“”“YOLOv8 检测头,使用动态头进行目标检测。”“”
def __init__(self, nc=80, hidc=256, block_num=2, ch=()):"""初始化检测层。参数:nc (int): 类别数量hidc (int): 隐藏层通道数block_num (int): 动态头块的数量ch (tuple): 输入通道数"""super().__init__()self.nc = nc # 类别数量self.nl = len(ch) # 检测层数量self.reg_max = 16 # DFL 通道数self.no = nc + self.reg_max * 4 # 每个锚点的输出数量self.stride = torch.zeros(self.nl) # 在构建过程中计算的步幅c2, c3 = max((16, ch[0] // 4, self.reg_max * 4)), max(ch[0], self.nc) # 通道数self.conv = nn.ModuleList(nn.Sequential(Conv(x, hidc, 1)) for x in ch) # 卷积层self.dyhead = nn.Sequential(*[DyHeadBlock(hidc) for _ in range(block_num)]) # 动态头块self.cv2 = nn.ModuleList(nn.Sequential(Conv(hidc, c2, 3), Conv(c2, c2, 3), nn.Conv2d(c2, 4 * self.reg_max, 1)) for _ in ch) # 第二层卷积self.cv3 = nn.ModuleList(nn.Sequential(nn.Sequential(DWConv(hidc, x, 3), Conv(x, c3, 1)),nn.Sequential(DWConv(c3, c3, 3), Conv(c3, c3, 1)),nn.Conv2d(c3, self.nc, 1),)for x in ch) # 第三层卷积self.dfl = DFL(self.reg_max) if self.reg_max > 1 else nn.Identity() # DFL层def forward(self, x):"""连接并返回预测的边界框和类别概率。"""for i in range(self.nl):x[i] = self.conv[i](x[i]) # 通过卷积层处理输入x = self.dyhead(x) # 通过动态头处理shape = x[0].shape # 获取输出形状for i in range(self.nl):x[i] = torch.cat((self.cv2[i](x[i]), self.cv3[i](x[i])), 1) # 连接第二层和第三层的输出if self.training:return x # 如果是训练模式,返回中间结果elif self.dynamic or self.shape != shape:# 如果是动态模式或形状变化,更新锚点和步幅self.anchors, self.strides = (x.transpose(0, 1) for x in make_anchors(x, self.stride, 0.5))self.shape = shape# 将输出结果进行拼接x_cat = torch.cat([xi.view(shape[0], self.no, -1) for xi in x], 2)box, cls = x_cat.split((self.reg_max * 4, self.nc), 1) # 分割边界框和类别dbox = dist2bbox(self.dfl(box), self.anchors.unsqueeze(0), xywh=True, dim=1) * self.strides # 解码边界框y = torch.cat((dbox, cls.sigmoid()), 1) # 拼接解码后的边界框和类别概率return y # 返回最终结果def bias_init(self):"""初始化检测层的偏置,警告:需要步幅可用。"""m = self # 当前模型for a, b, s in zip(m.cv2, m.cv3, m.stride): # 遍历卷积层a[-1].bias.data[:] = 1.0 # 边界框偏置初始化b[-1].bias.data[:m.nc] = math.log(5 / m.nc / (640 / s) ** 2) # 类别偏置初始化
代码核心部分说明:
Detect_DyHead类:这是YOLOv8模型的检测头,负责处理输入特征并生成边界框和类别概率。
初始化方法:设置类别数量、通道数、步幅等,并定义多个卷积层和动态头块。
前向传播方法:处理输入特征,通过卷积层和动态头生成输出,支持训练和推理模式。
偏置初始化方法:为模型的卷积层设置初始偏置值,以提高训练效果。
以上是代码的核心部分和详细注释,涵盖了YOLOv8检测头的主要功能和结构。
这个程序文件 head.py 是一个用于目标检测的深度学习模型的实现,主要基于 YOLOv8 架构。文件中定义了多个检测头(Detect Head),每个检测头都实现了不同的功能和结构,以适应不同的任务需求,如目标检测、分割、姿态估计等。
首先,文件引入了一些必要的库,包括 PyTorch 及其相关模块,数学库等。接着,定义了一系列类,主要是不同类型的检测头,这些类继承自 nn.Module,使得它们可以被 PyTorch 的训练和推理框架所使用。
每个检测头类都有以下几个主要部分:
初始化方法 (init):该方法用于定义模型的结构,包括输入输出的通道数、卷积层、激活函数等。通过参数可以灵活配置模型的各个部分,比如类别数、隐藏层通道数、卷积块数量等。
前向传播方法 (forward):该方法定义了数据在模型中的流动过程。它通常包括对输入数据的处理、特征提取、分类和回归等步骤。对于不同的检测头,前向传播的实现可能会有所不同,以适应不同的任务需求。
锚框和步幅的计算:在训练过程中,模型需要根据输入特征图的形状动态计算锚框和步幅,以便进行目标检测时的边界框回归。
权重初始化方法 (bias_init):该方法用于初始化模型的偏置项,以提高模型的收敛速度和性能。
特定任务的实现:一些类实现了特定的功能,比如 Detect_LSCD 用于轻量级共享卷积检测头,Detect_AFPN_P345 实现了具有自适应特征金字塔网络的检测头,Detect_TADDH 实现了任务动态对齐检测头等。
解码方法 (decode_bboxes):用于将模型输出的边界框进行解码,以便将其转换为实际的坐标格式。
后处理方法:在推理阶段,模型输出的结果需要经过后处理,以获得最终的检测结果,包括边界框、类别和置信度等。
整体来看,这个文件实现了 YOLOv8 的多个检测头,提供了灵活的结构以适应不同的应用场景,如目标检测、实例分割、姿态估计等。通过组合不同的检测头,用户可以根据需求构建适合特定任务的模型。
源码文件

源码获取
欢迎大家点赞、收藏、关注、评论啦 、查看👇🏻获取联系方式