Fanuc机器人EtherCAT通讯配置详解
1、EtherCAT简介
EtherCAT,这一基于以太网的现场总线系统,以其开放架构和高速性能著称。CAT代表的是控制自动化技术(Control Automation Technology)的缩写,彰显了其在工业自动化领域的核心地位。作为确定性的工业以太网技术,EtherCAT由德国Beckhoff公司(倍福)率先研发,以其无需IP地址、高速传输(每个节点接收及传送资料时间仅需1微秒以下)以及大数据处理能力受到广泛赞誉。在Fanuc机器人中,EtherCAT板卡仅作为从站角色存在,通常与Beckhoff的PLC主站配合使用,共同构建高效稳定的通讯网络。其最大输入输出字节数可达512字节,为复杂的数据交换提供了有力支持。本文将深入探讨EtherCAT网络通讯的配置方法,助力您更好地利用这一技术优势。
2、配置前的准备
在着手配置EtherCAT网络通讯之前,我们需要确保已经完成了以下准备工作:首先,确认网络中所有设备的硬件连接已经正确完成,且设备状态良好;其次,熟悉并了解EtherCAT的通讯协议及数据交换标准;最后,准备好相应的配置工具和软件,以便于进行后续的配置操作。通过这些充分的准备,我们将能够更加顺利地开展EtherCAT网络通讯的配置工作。
2.1 确保硬件连接无误
在开始配置EtherCAT网络通讯之前,首要任务是验证网络中所有设备的硬件连接是否已经正确且稳固地建立。这包括检查网线、交换机、路由器以及EtherCAT从站设备等的连接情况,确保它们的状态良好,能够正常进行数据传输。通过这一步骤的准备,我们可以为后续的配置操作奠定坚实的基础。
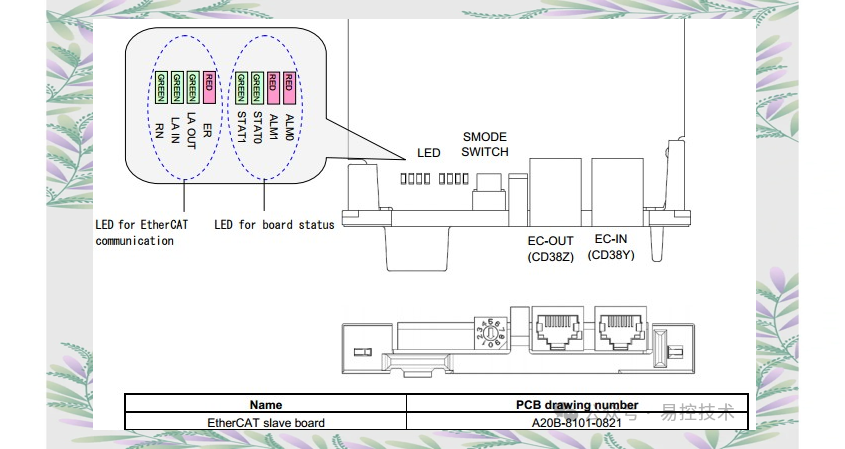
机器人配置:采用EtherCAT Slave Board(编号A20B-8101-0821)进行连接,通过带屏蔽的网线将板卡与PLC的网口相连,确保网络接口EC-IN(CD38Y)正确无误。
2.2 软件配置在开始使用EtherCAT Slave Board之前,需要确保已经准备好了相应的软件。这包括安装必要的驱动程序和配置工具,以确保板卡与PLC之间的顺畅通信。同时,还需要熟悉相关的软件界面和操作流程,以便能够高效地利用板卡的功能。
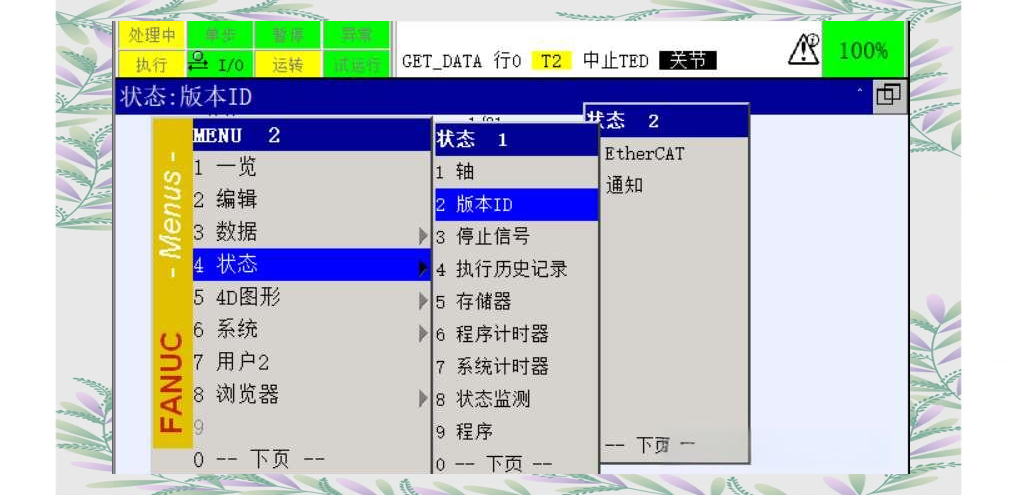
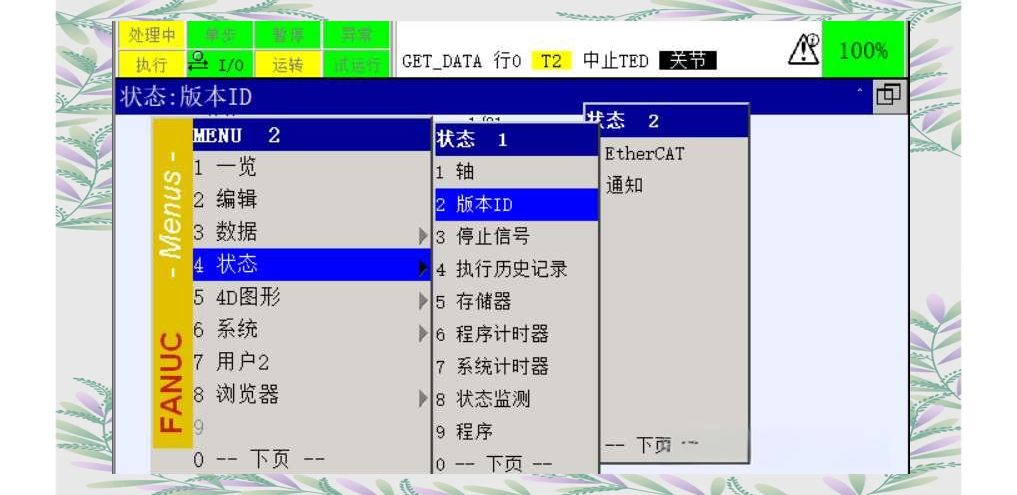
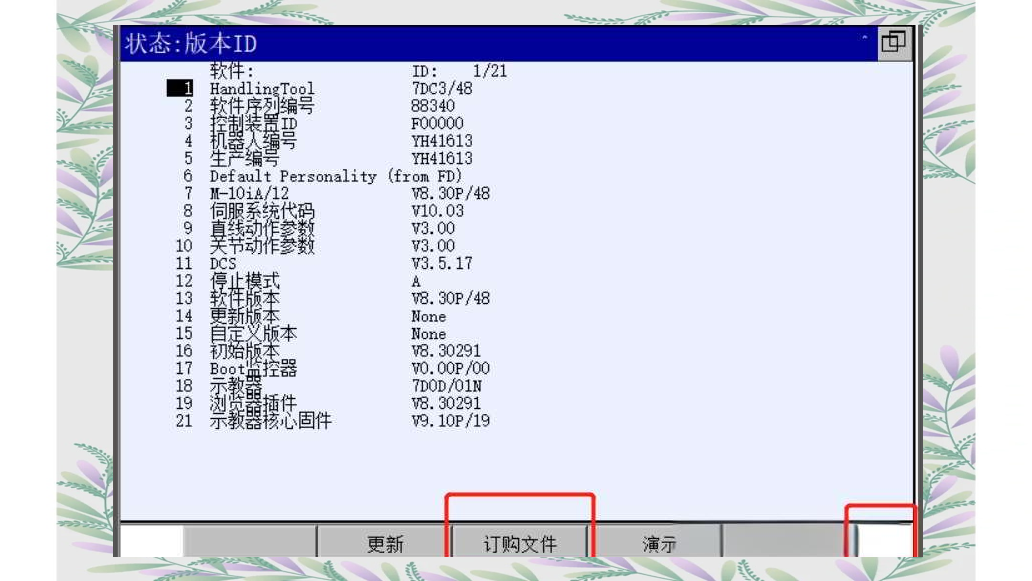
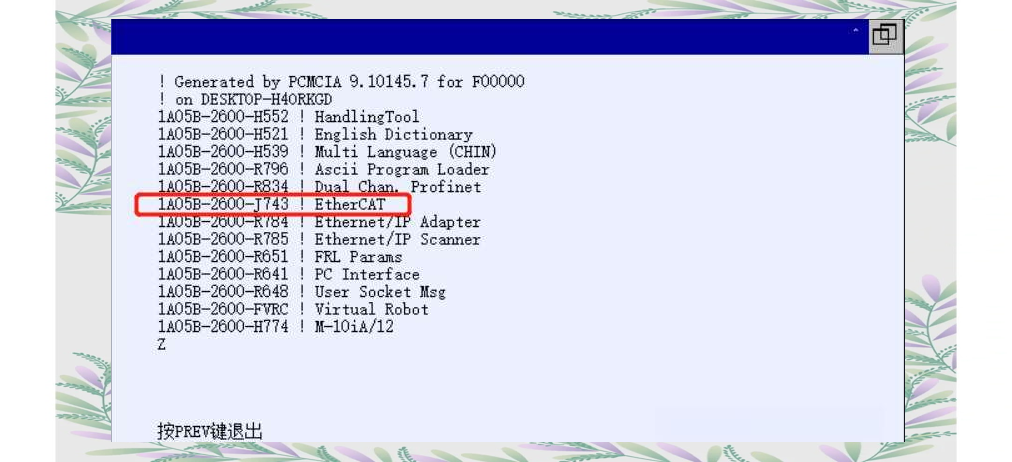
使用EtherCAT通讯方式时,机器人系统需满足一定版本要求。对于7DC2/11版本以上的系统,可直接使用;而若是Mate柜,则需确保系统版本至少为7DC3。在MENU菜单中,依次选择下一页、版本ID、NEXT和订购文件,即可找到相关软件编号。若系统中未包含此选项,需进行功能添加操作,具体方法可咨询后台或通过回复“发那科刷机”了解更多详情。
2.3 关于通讯ESI文件
在EtherCAT通讯方式下,机器人系统不仅需要满足版本要求,还需要正确处理通讯ESI文件。这些文件是机器人系统通讯的关键组成部分,负责在各个设备之间传递数据和指令。确保ESI文件的正确性和完整性,对于保障机器人系统的稳定通讯至关重要。
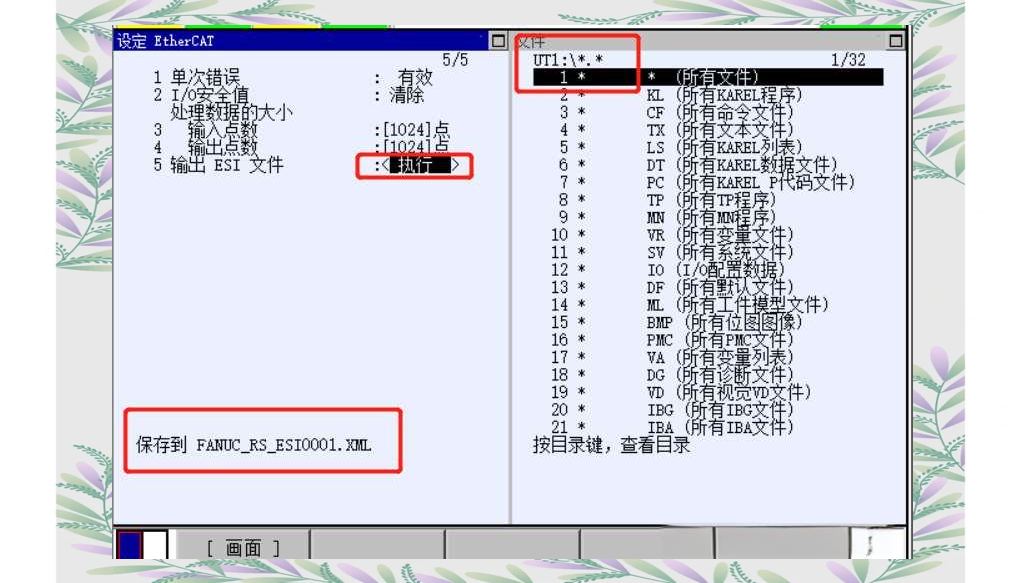
需向PLC工程师提供机器人EtherCAT通讯的ESI文件。此文件可在机器人EtherCAT配置界面的“输出ESI文件”选项中导出,其导出路径位于menu-file目录下,且导出的文件名默认为FANUC_RS_ESI0001.xml。
具体操作步骤如下:在EtherCAT配置界面中,将光标移至第五项“输出ESI文件:执行”上,并按下ENTER键。此时,ESI文件将被成功导出,并在屏幕下方显示“保存到FANUC_RS_ESI0001.XML”的提示。随后,可在指定的导出位置,例如U盘,找到该ESI文件。
3、EtherCAT配置详解
3.1 深入了解EtherCAT配置界面
在机器人EtherCAT通讯中,配置环节至关重要。本文将带您逐步探索EtherCAT的配置界面,了解其各项功能与操作。通过深入剖析,您将能更熟练地运用EtherCAT,实现机器人通讯的高效配置。
- 进入配置界面:首先,在菜单中选择“设置”,然后进入“EtherCAT”选项,以此开启EtherCAT的配置之旅。
- 设定通讯参数:根据实际的通讯需求,您需要仔细设定输入点数和输出点数,以确保通讯的顺畅与准确。
- 冷启动机器人:在每次更改了EtherCAT配置界面的参数后,务必进行机器人的冷启动,以使新的配置能够生效并应用于实际通讯中。
接下来,我们将详细解释界面上的各项设置。
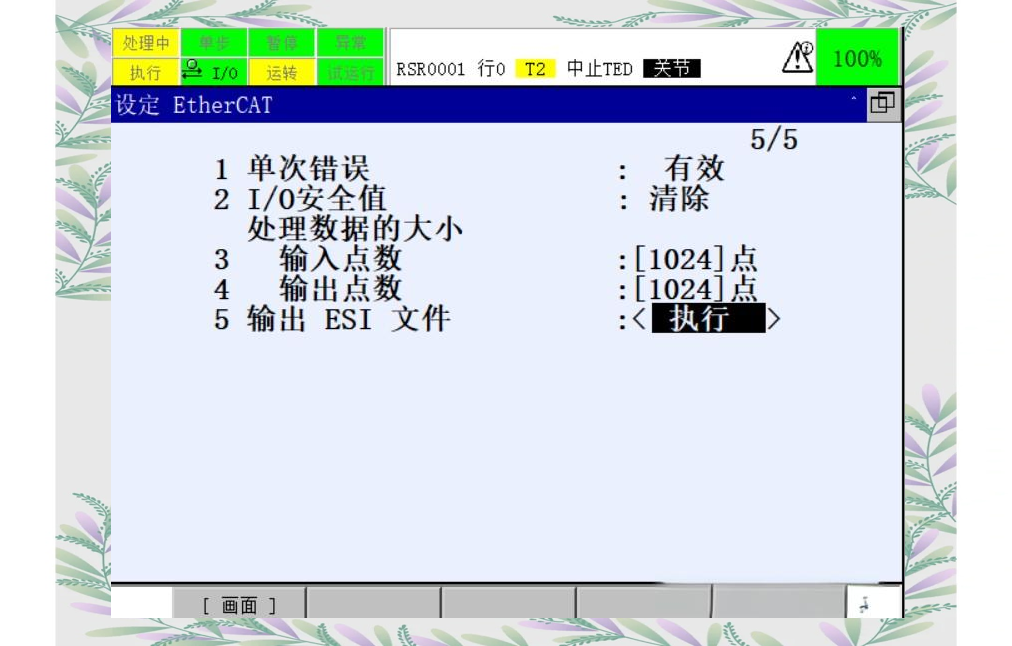
在EtherCAT配置过程中,若出现单次通讯错误,通常在正常通讯后需将“单次错误”设置为“无效”。但在配置EtherCAT之前,若需移动机器人,则可以将此项设置为“有效”,以清除“PRIO-801 EtherCAT 脱机”的报警。
此外,还需注意“I/O 安全值”的默认设置,通常为清除状态。
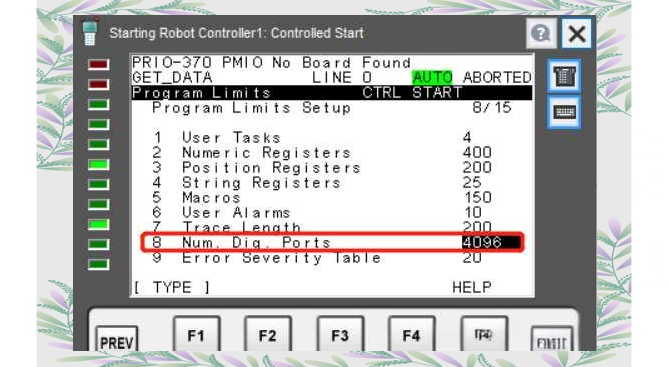
关于输入点数和输出点数的选择,可以通过点F4[选择]在128、256、512、1024、2048、4096这些选项中进行设定。当选择超过512的数值时,可以在控制启动—menu—下一页—程序设置中进一步调整最大DIDO数量。
最后,若需导出xml配置文件,可以选择“输出ESI文件”,并将其保存到menu—文件目录中。
3.2 关键变量解释
$ECAT.ASGUOP 默认值为1,代表自动将UOP分配给EtherCAT网络;若设为0,则表示不进行UOP的自动分配。
3.3 信号分配
在机架号为106,插槽号固定为1的情况下,我们可以查看以下的信号分配示例:
4、PLC侧配置示例
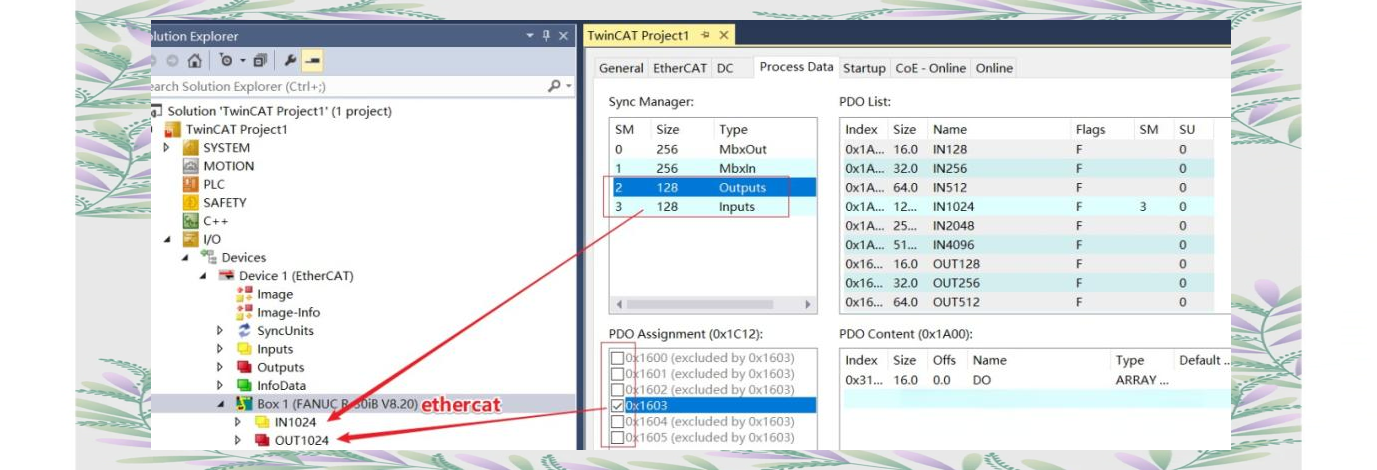
以Beckhoff PLC为例,加载上文导出的FANUC_RS_ESI0001.xml文档后,可以在PDO Assignment中修改输入输出变量的字节大小,支持16/32/64/128/256/512 Bytes的灵活配置。
5、常见报警及其应对措施
报警信息:PRIO-801,EtherCAT脱机
应对措施:检查EtherCAT设置或网线连接是否正常。