《人形机器人的觉醒:技术革命与碳基未来》——触觉反馈系统:电子皮肤的概念、种类、原理及在机器中的应用
目录:
一、电子皮肤的概念种类和工作原理及在人形机器人中的应用
二、电子皮肤技术前沿及攻关的难点和重点和主要研发机构
三、电子皮肤主要检测和表征技术与设备及国产化进程
四、人形机器人对电子皮肤的具体要求及适配性进展
五、电子皮肤主要制造商产品特征和供应能力及市场需求变化和竞争格局
六、全球电子皮肤专利综合分析
电子皮肤
一、电子皮肤的概念种类和工作原理及在人形机器人中的应用
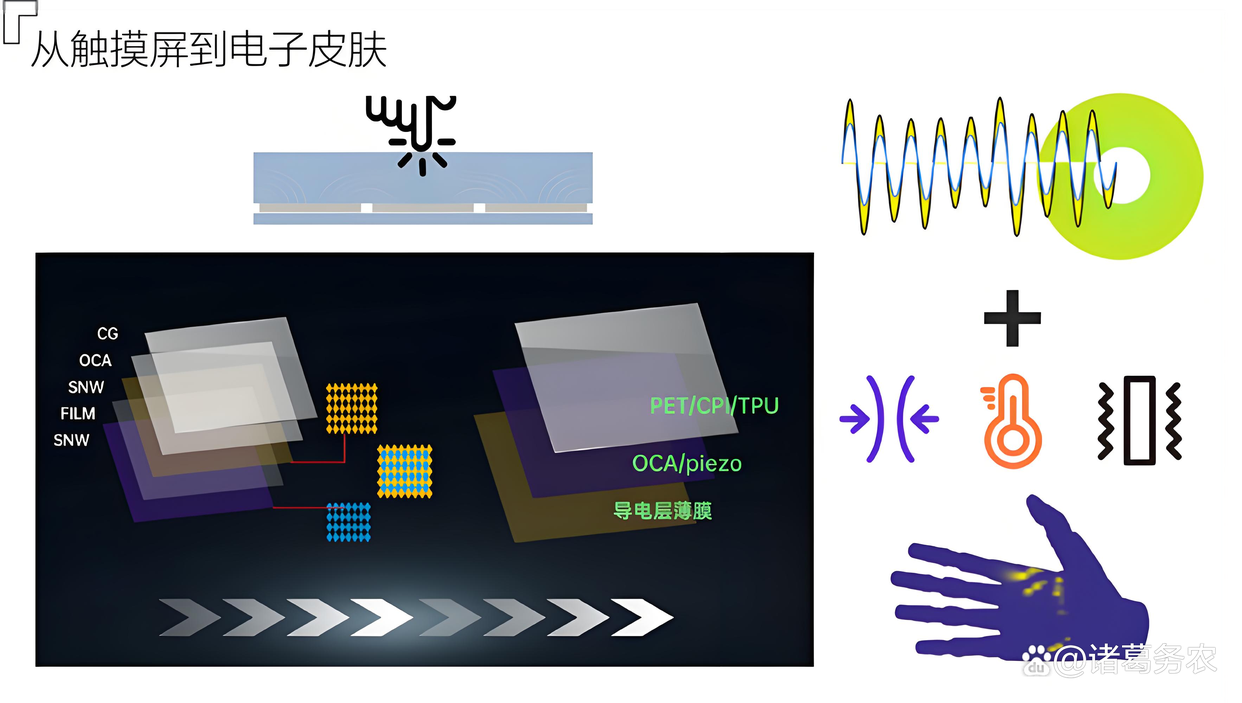
电子皮肤(E-skin)是一种模拟人类皮肤感知功能的柔性电子器件,通过将物理刺激转化为电信号,赋予机器人类似的触觉能力。
(一)电子皮肤的概念与核心特征
1. 仿生本质
电子皮肤通过柔性材料基底(如PDMS、水凝胶)和活性导电层(如石墨烯、碳纳米管)模拟人类皮肤的力学特性(可拉伸率最高达400%)及多维感知能力(压力、温度、纹理等)。
2. 核心功能
触觉感知:检测压力分布、物体软硬度及表面纹理。
安全交互:实时反馈力度,避免机械损伤或人机碰撞。
环境适应:贴合机器人复杂曲面(如手指、关节),实现动态响应。

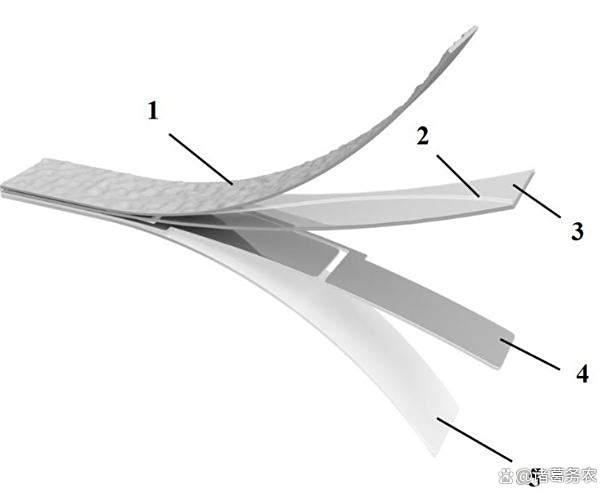
多维力(触)觉传感器
(二)电子皮肤的种类与工作原理
1. 按技术原理分类
以下是主要电子皮肤类型及其特性比较:
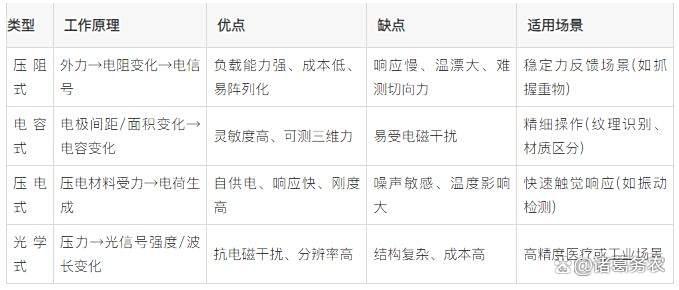
不同类型电子皮肤的原理特性和应用范围
2. 信号处理流程
传感层:外部刺激(压力、温度)→ 电/光信号转换。
感知层:AI算法解耦多维力(如正压力、切向力),融合视觉/听觉数据构建物体属性模型。
执行层:依据反馈调整动作(如抓取力度、避障路径)。
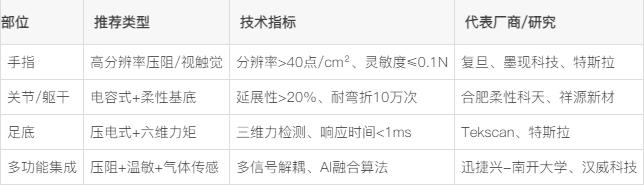
(三)适用于人形机器人的电子皮肤类型
1. 指尖灵巧操作应用
1)技术需求:
高空间分辨率(≥100点/cm²)、微力感知(阈值≤0.1N)。
2)代表方案:
特斯拉Optimus Gen2:12×8像素阵列,单点分辨率0.8–1mm,实现“捏鸡蛋”级精细控制。
复旦视触觉AI传感器:灵敏度达0.01N(人体10倍),通过摄像头捕捉硅胶粒子位移,AI解耦多维力,成本降低50倍,适用于豆腐/薯片抓取。
东莞墨现科技:硅胶基电子皮肤(厚度0.2mm),触发力5g,覆盖手指100感应点。
2. 全身安全交互应用
关节与躯干:压阻/电容式传感器覆盖肩、肘、膝部,监测运动状态与外力碰撞(如跌倒保护)。合肥柔性科天水性聚氨酯“仿生皮肤”(三代迭代),重量<10kg,贴合机械结构,提供类肤触感。
足底与平衡:六维力矩传感器(如Optimus脚踝)检测地面反作用力,适应复杂地形。
3. 多模态融合智能
嗅觉+触觉集成:迅捷兴与南开大学开发“电子鼻+电子皮肤”双模系统,赋予机器人气体识别与触觉反馈能力,用于危化品巡检或医疗场景。
自愈与温度感知:水凝胶基底材料模拟皮肤弹性,未来可整合温敏元件(如PN结测温)。

人形机器人用仿生皮肤
(四)技术挑战与未来趋势
1. 当前瓶颈
成本与工艺:磁控溅射、电子束蒸镀等工艺昂贵,碳纳米管/石墨烯材料单价高。
信号干扰:电容式易受电磁干扰,压电式噪声敏感。
大规模集成:全身覆盖需200cm²/机器人(成本约1万元/台),且需解决多传感器协同。
2. 创新方向
材料革新:3D打印导电聚合物(拉伸率400%)、卷对卷加工纳米薄膜降低成本。
神经拟态:仿生传入神经(压力传感器+突触晶体管),直接编码生物电信号(如斯坦福“数字皮肤”刺激鼠神经)。
3. 商业落地:
2030年全球市场规模92亿元(人形机器人主导),国内汉威科技、能斯达等企业加速量产。
假肢、医疗监测(血压/呼吸)、汽车轮胎压力传感等拓展场景崛起。
(五)总结:人形机器人电子皮肤的选型建议
电子皮肤正推动机器人从“机械执行”向“感知-决策-交互”跃迁。随着材料成本下降(如复旦方案)与跨领域应用拓展,兼具仿生特性与超敏感知的电子皮肤将成为人形机器人的核心组件,重塑医疗、工业及消费电子的人机交互范式。
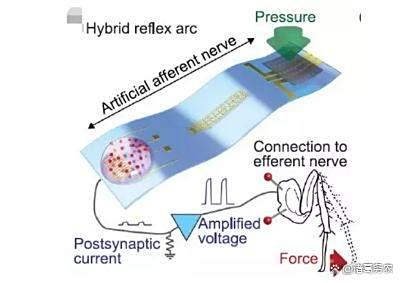
蟑螂腿被人造神经控制机理
二、电子皮肤技术前沿及攻关的难点和重点和主要研发机构
(一)技术限制与前沿突破
1. 多模态信号干扰与解耦
1)限制:
传统传感器难以同时检测压力、温度、湿度等多维信号,且存在串扰问题。例如,拉伸应变易导致传感材料电学特性漂移,影响精度。
2)前沿突破:
清华大学:基于布拉格光纤光栅(FBG)的分布式传感器,通过S形排布光栅和波长位移解耦算法,同步实现接近感知、力触觉感知和非接触温度感知,抗干扰能力提升3倍。
中山大学:开发“岛桥并联结构”水凝胶传感器(SSIM),利用PET刚性岛与PDMS柔性基底的高模量差(模量差>100倍),将应变干扰降至0.2%,实现温度、湿度、紫外线、氧气四模态无串扰检测。
2. 大规模制造与耐久性
1)限制:
传统工艺(如磁控溅射)成本高,软硬界面易损坏;循环大应变下材料裂纹扩展导致性能退化(例如灵敏度下降>30%)。
2)前沿突破:
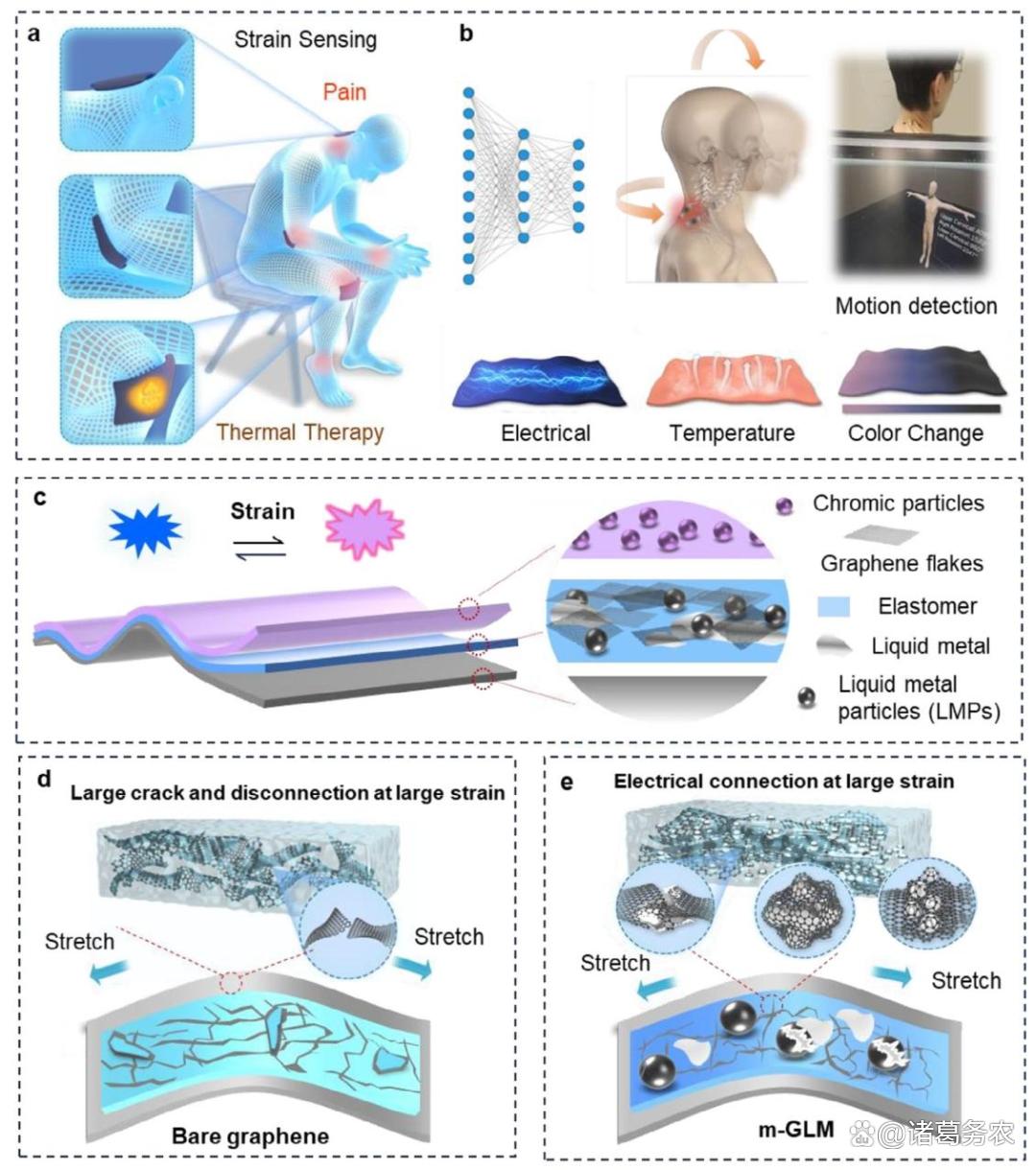
新加坡国立大学&华中科大:iStretch电子皮肤采用石墨烯-液态金属(m-GLM)纳米复合材料,通过液态金属填充裂纹机制,实现300%应变范围、10,000次循环稳定性(电阻变化<3%)。
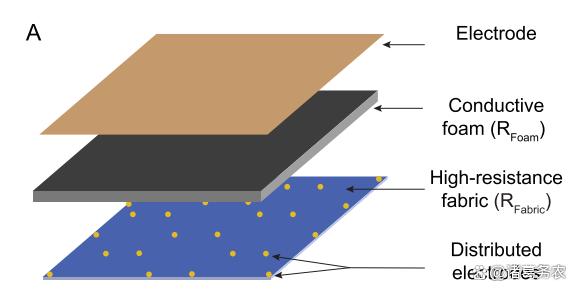
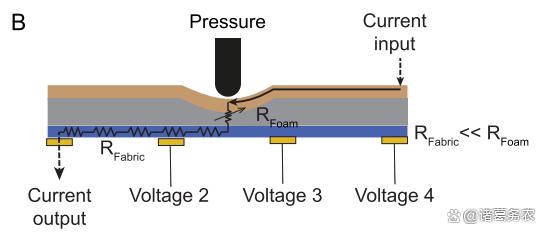
剑桥大学:单层水凝胶结合电阻抗断层成像(EIT),仅需32个电极即可构建172万个触觉通道,简化制造并提升鲁棒性。
3. 感知维度与灵敏度
1)限制:
现有技术难以兼顾高灵敏度与大范围检测(如压力检测范围通常限于0.1–100 kPa)。
2)前沿突破:
复旦大学:仿生微结构-导电聚合物复合传感器,压力检测范围扩展至0.1 Pa–100 kPa(覆盖羽毛到钢块),灵敏度达人类指尖的10倍(0.01N)。
某团队:3D双相结构电子皮肤(CNC/PPy/PVA),通过冷冻捕获自组装策略,实现应变、压力、气体、温度四维信号同步感知,灵敏度提升40%。
(二)攻关难点与重点方向
1. 材料与结构创新
难点在于平衡柔性、导电性与耐久性。例如水凝胶易失水、导电聚合物易老化。重点方向:
自修复材料:复旦大学在导电聚合物中嵌入可逆化学键,实现室温自修复(效率>92%)。
仿生结构:纽约州立大学布法罗分校开发类神经织物,通过摩擦伏特效应实现0.76ms响应(接近人类触觉受体),解决物体滑移检测难题。
2. 多模态融合与算法
难点是多源信号实时解耦需复杂算法支持,传统线性模型难以处理非线性耦合。重点方向:
AI驱动解耦:复旦大学视触觉传感器结合CNN算法,将粒子位移场转化为多维力信息,实现压力、剪切、扭转力的精准解耦。
动态补偿机制:中山大学SSIM传感器引入自补偿电路,消除环境湿度对温度测量的影响,误差<1%。
分布式多模态柔性传感器
3. 系统集成与能耗
难点:全身覆盖需数百个传感节点,功耗与无线传输成瓶颈。重点方向:
低功耗设计:清华大学FBG传感器利用光学信号传输,功耗较电学传感器降低90%。
模块化集成:迅捷兴与南开大学合作开发“电子鼻+电子皮肤”双模系统,通过共享处理单元降低冗余。
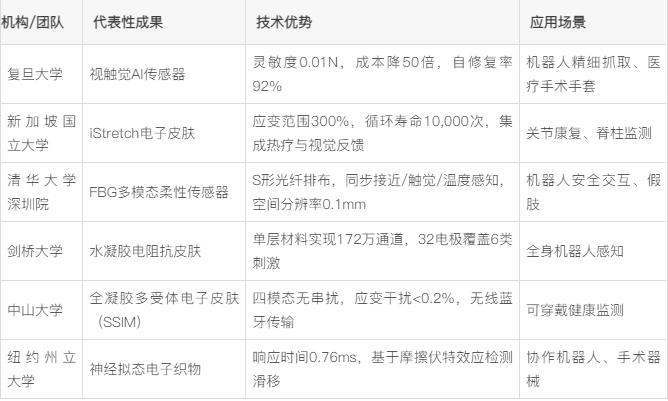
(三)主要研发机构与成果进展
(四)未来趋势与挑战
1. 技术融合加速
神经拟态传感:斯坦福“数字皮肤”探索压力传感器+突触晶体管,直接编码生物电信号。
AI-材料协同:深度学习优化材料设计(如生成式模型预测液态金属-聚合物配比),缩短研发周期50%。
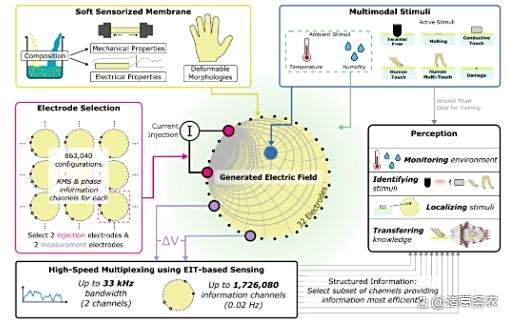
172万触觉通道水凝胶多模态机器人皮肤
2. 规模化应用挑战
成本:高端电子皮肤单价超$1,000,特斯拉Optimus Gen2通过12×8像素阵列简化设计,目标降至$100/台。
标准化:多传感器信号接口尚未统一,汉威科技、能斯达等企业正推动工业协议制定。
3. 新兴场景拓展
医疗闭环系统:iStretch的“监测-热疗-预警”一体化范式,有望用于慢性病管理。
跨领域集成:“电子鼻+电子皮肤”双模系统(迅捷兴-南开大学)将拓展至危化品巡检、医疗诊断。
(五)总结
电子皮肤的核心壁垒在于多模态解耦、耐久性提升与低成本制造。未来突破将依赖仿生材料设计(如自修复水凝胶)、神经拟态架构及AI算法融合。随着2030年全球市场达92亿元(年复合增长率28%),中美科研团队在柔性传感领域的竞合,将重塑机器人、医疗及消费电子的人机交互范式。
三、电子皮肤主要检测和表征技术与设备及国产化进程
电子皮肤(E-skin)的可靠性与性能高度依赖于系统化的测试与表征技术。我国在材料设计、多模态感知、AI融合等方面取得了显著突破,推动该技术向实用化迈进。
(一)核心测试与表征技术体系
电子皮肤的测试需覆盖力学形变适应性、电学稳定性、环境鲁棒性及多模态感知能力四大维度,具体技术如下:
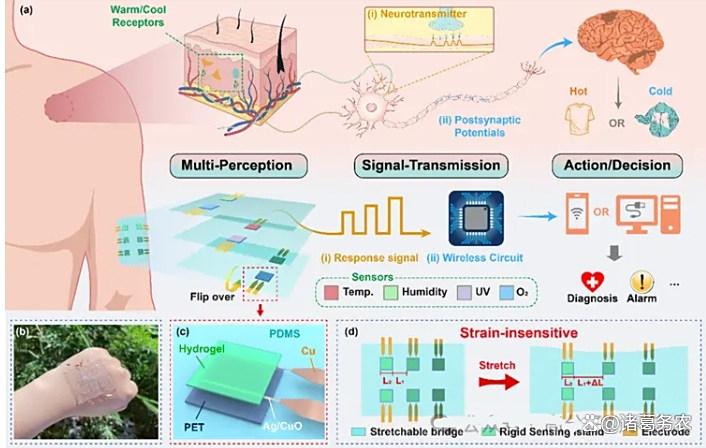
SSIM电子皮肤的设计概念
1. 力学形变适应性测试
1)动态弯折测试:模拟关节运动(如手指弯曲),评估材料在周期性形变下的疲劳寿命。
方法:设定弯折角度(0°–180°)、频率(1–5Hz)及循环次数(最高10⁶次),监测电阻变化率(ΔR/R₀)及裂纹扩展。
设备:工业级Instron ElectroPuls系列,支持高频动态弯折;低成本方案:Arduino控制定制夹具(<$5k)。
2)拉伸/扭转测试:
拉伸:万能材料试验机(如PY-H802型)测试断裂应变(100%–1000%)及动态拉伸疲劳。
扭转:角速度控制(如30°/s)至±180°,观察导电层剥离现象。
2. 电学性能稳定性测试
1)原位电学监测:
电阻/电容漂移:四探针电阻仪(Keithley 2450)实时记录形变下的ΔR/R₀或ΔC/C₀。
阻抗分析:Keysight E4990A评估电容式传感器的介电性能衰减。
2)多触点信号解耦:
电阻抗断层成像(EIT):通过电极阵列电压变化重构触觉分布,如爱丁堡大学开发的水凝胶EIT传感器,触点分类准确率达99.6%。
深度学习辅助:ERT传感器结合Transfer-Net与Recon-Net网络,将电压信号映射为力分布图,多触点定位误差降至6%以下。
3. 环境鲁棒性验证
温湿度耦合测试,设备:恒温恒湿箱(如PY-E608D)模拟人体环境(37℃, 60%RH),测试基底软化或离子迁移导致的性能衰减。
极端环境模拟:华南理工大学采购的柔性器件测试系统支持高空、深海等场景,同步分析力学-电学信号。
4. 多模态感知表征
视触觉融合:复旦大学方案:摄像头捕捉硅胶粒子位移场,CNN算法解耦压力、剪切、扭转力,灵敏度达0.01N(人类10倍)。
嗅觉+触觉集成:迅捷兴与南开大学“电子鼻+电子皮肤”双模系统,支持气体识别与触觉反馈,适用于危化品巡检。
(二)我国技术突破与核心成果
1. 高灵敏度多模态传感
复旦大学视触觉AI传感器:突破压力检测范围0.1Pa–100kPa(覆盖羽毛至钢块),自修复效率>92%,成本降50倍。应用于机械手实现豆腐抓取、汤圆舀取等精细操作,工业分拣成功率提升40%。
某团队3D双相结构电子皮肤:冷冻捕获自组装策略构建半封闭多维网络,同步感知应变、压力、气体、温度四维信号。
2. 低成本制造与集成工艺
东莞墨现科技:硅胶基电子皮肤厚度0.2mm,最小触发力5g,单手指集成100感应点,贴合机器人复杂关节。
合肥柔性科天:水性聚氨酯仿生皮肤重量<10kg,耐弯折10万次,适配全身覆盖。
3. 新型测试方法论
AI驱动的仿真-实验闭环:ERT传感器优化,通过有限元仿真生成29万条数据训练AI模型,减少真实实验量90%。
原位自修复监测:集成荧光探针实时显示裂纹位置,触发微胶囊修复剂,提升耐久性。
(三)核心测试设备国产化进展

(四)技术挑战与未来方向
1. 耐久性瓶颈:
循环弯折10⁵次后导电层易裂纹(ΔR/R₀>20%)7 → 需发展仿生蛇形电路或液态金属填充(如m-GLM材料)。
2. 多信号串扰:
温湿度对压力检测的干扰 → 中山大学SSIM传感器通过岛桥结构将应变干扰降至0.2%。
3. 标准化缺失:
测试协议分散(如IEC 62847侧重机械可靠性,ASTM F2193关注导体稳定性)→ 亟需建立中国电子皮肤测试国家标准。
电子皮肤
(五)总结
我国电子皮肤测试技术正向多模态融合、AI驱动仿真、极端环境验证三大方向突破:复旦的视触觉解耦、墨现科技的高密度集成、华南理工的环境模拟系统代表国际前沿水平。未来需攻克长寿命材料(如室温自修复聚合物)、神经拟态传感架构(类脑信号编码)及低成本量产工艺(卷对卷印刷),推动电子皮肤在人形机器人、医疗监测等场景的规模化落地。
四、人形机器人对电子皮肤的具体要求及适配性进展
(一)电子皮肤的核心性能指标体系
电子皮肤需兼顾力学适应性、电学稳定性、感知精度及环境鲁棒性四大维度:
1. 力学形变适应性
弯曲半径:最小可弯曲曲率(需≤1mm,模拟指关节)。
拉伸应变:断裂极限应变(需≥100%,贴合肢体活动)。
循环寿命:动态弯折/拉伸10⁴–10⁶次后性能衰减≤20%。
2. 电学性能稳定性
电阻/电容变化率(ΔR/R₀或ΔC/C₀):形变下波动需<±10%。
响应时间:触觉反馈延迟需≤1ms(接近人类触觉受体1-50ms水平)。
灵敏度:压力检测阈值需≤0.1kPa(人类皮肤阈值1kPa)。
3. 感知能力
多模态融合:同步检测压力、温度、切应力、湿度等信号。
空间分辨率:指尖需≥40点/cm²(人类指尖约100点/cm²)。
量程范围:压力检测需覆盖0.1Pa–1MPa(羽毛至重物)。
4. 环境鲁棒性
温湿度耐受:在37℃、60%RH人体环境下性能稳定。
自修复能力:受损后室温修复效率>90%(提升耐用性)。
(二)人形机器人对电子皮肤的具体要求
不同身体部位因功能差异,对电子皮肤的要求呈现梯度分化:
1. 手部(指尖与手掌)
技术要求:空间分辨率≥100点/cm²,力分辨率≤0.01N(实现“捏鸡蛋”级操作)。多维力解耦(正压力、切向力、扭转力同步感知)。
应用场景:抓取豆腐、装配精密零件等易损物操作。
2. 关节与躯干
技术要求:延展性>20%,耐弯折10万次以上(适应肢体运动)。碰撞检测灵敏度≤5N(实现安全人机交互)。
应用场景:防碰撞、跌倒保护、运动状态监测。
3. 足底
技术要求:六维力矩感知(检测地面反作用力)。响应时间<1ms(快速调整步态适应地形)。
应用场景:复杂地形行走、平衡控制。
4. 系统级要求
低功耗:单点传感功耗≤100nW(全身覆盖需数百节点)。
集成度:多模态信号解耦算法(避免温湿度对压力检测干扰)。
轻量化:厚度≤0.3mm,重量<10kg/全身。
(三)当前技术满足程度与差距分析
1. 已实现突破的领域
精细操作(手部):复旦视触觉传感器压力检测范围达0.1Pa–100kPa,灵敏度0.01N(人类10倍),成功抓取豆腐、薯片。途见科技产品空间分辨率0.5mm(实验室达30μm),每平方厘米集成400个传感器。
快速响应:纽约州立大学布法罗分校的电子织物响应时间0.76ms,可实时检测物体滑移。
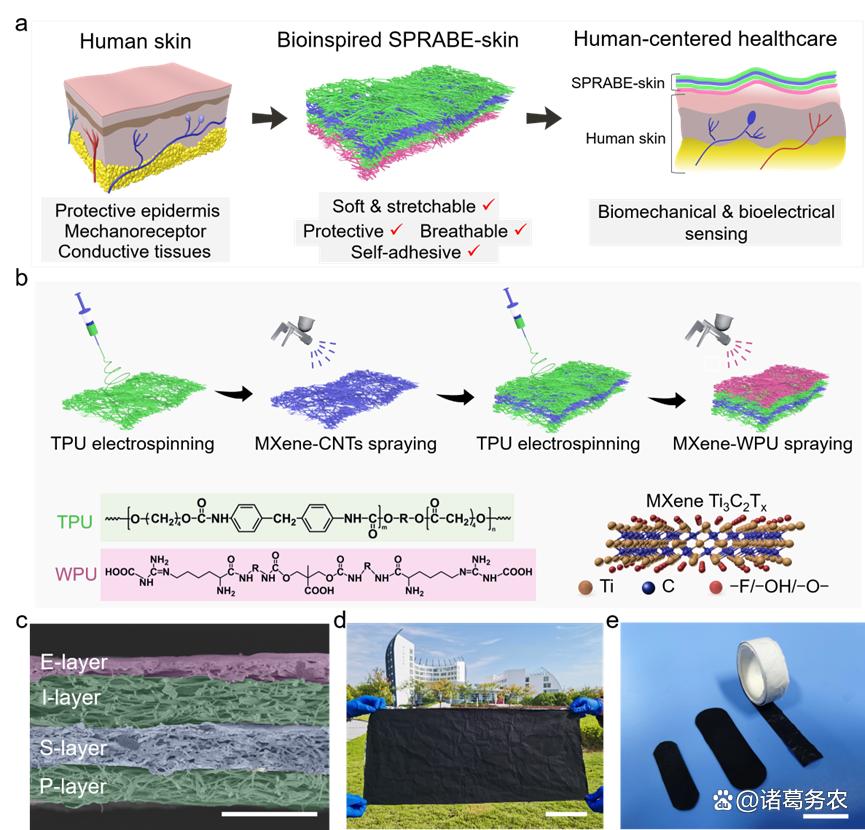
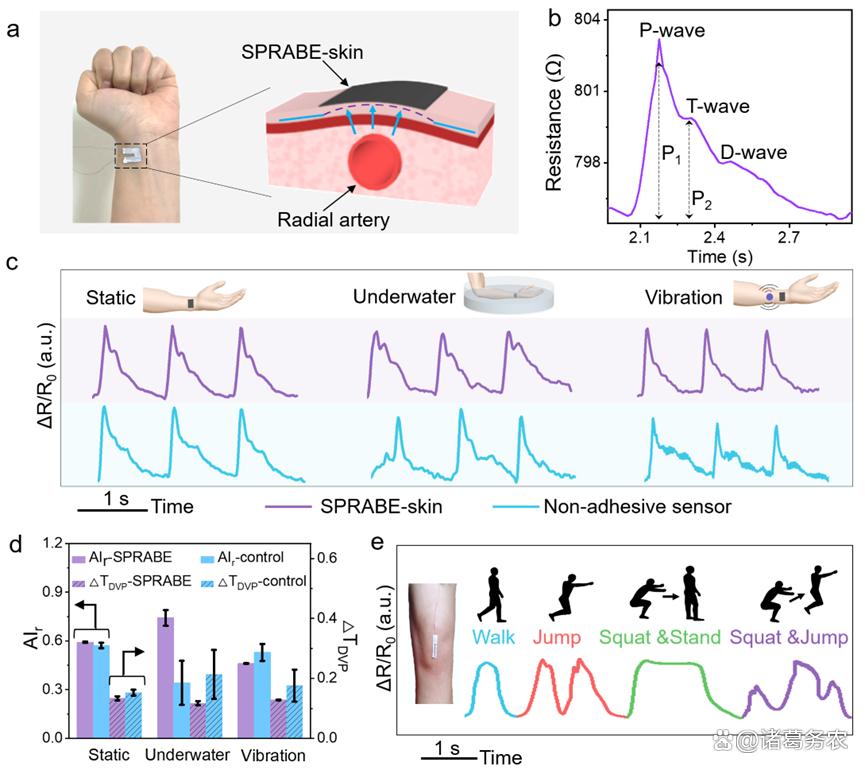
多模态融合:中科院上硅所SPRABE-skin同步采集生物力学与电生理信号(ECG/EMG),水下环境仍稳定工作。
2. 仍存在的技术瓶颈
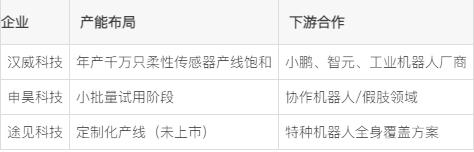
耐久性与大规模制造:循环弯折10⁵次后导电层易裂纹(ΔR/R₀>20%)。汉威科技虽实现量产,但产能仍受限(年产千万只柔性传感器产线已饱和)。
成本与经济性:高端电子皮肤单价超$1,000,而特斯拉目标成本为$100/台。
全身集成挑战:多传感器协同算法未统一,信号串扰问题突出(如温湿度影响压力精度)。
极端环境适应性:深海、高温等场景的专用电子皮肤仍处于实验室阶段。
(四)典型技术方案与机器人适配进展

(五)总结:技术现状与发展趋势
1. 已满足需求:
高灵敏度触觉(指尖)、快速响应(关节)、基础多模态感知已突破,支撑了初级精细操作与安全交互。
2. 待攻克难点:
长寿命材料(如自修复水凝胶)、全身集成经济性(卷对卷印刷工艺)、神经拟态架构(类脑信号编码)仍是瓶颈。
3. 产业进展:
国内企业(汉威科技、途见科技、复旦团队)在灵敏度与成本控制上领先,但量产与生态协同(如兆威机电“传动+感知”闭环)仍落后于国际头部。
4. 未来方向:
突破材料-算法-工艺的协同创新,推动电子皮肤从“单点功能”迈向“全身智能”,最终实现人形机器人的“类人化感知”。
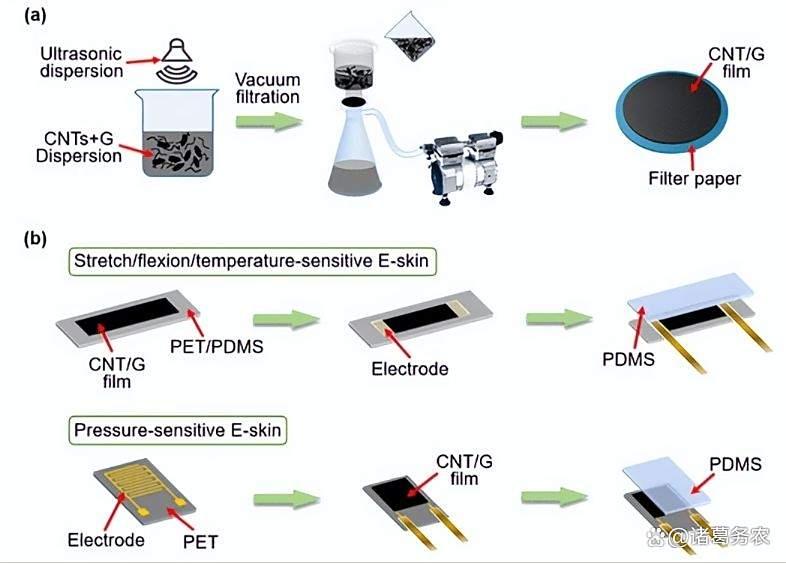
碳纳米管/G杂化膜和电子皮肤的制备工艺
五、电子皮肤主要制造商产品特征和供应能力及市场需求变化和竞争格局
(一)全球核心制造商及产品特征
1. 国际头部企业

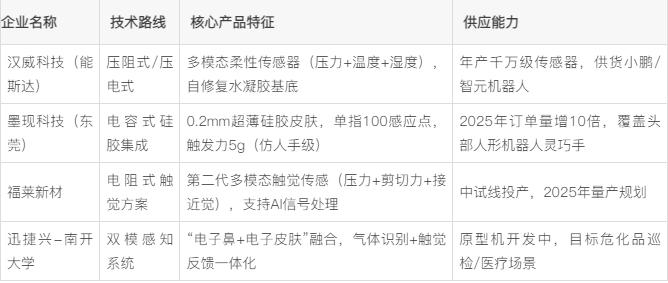
2. 国内领先厂商
(二)全球市场需求与变化趋势
1. 需求驱动因素
人形机器人爆发:2030年全球人形机器人电子皮肤市场规模达92亿元(手部44亿+其他部位48亿),特斯拉、小鹏等推动手部优先应用向全身覆盖延伸 。
医疗健康刚需:可穿戴生物电子贴片市场2024年规模24亿美元,CAGR 6.5%(2025-2034),慢性病远程监测(如心电图、血糖)为核心场景 。
工业自动化升级:柔性压力传感器市场2033年达68亿美元,汽车轮胎传感、工业机械手触觉反馈需求激增 。
2. 技术需求演变
多模态集成:单一压力传感 → 压力+温度+气体+剪切力复合感知(如福莱新材第二代产品)。
超薄柔性化:基底厚度从1mm降至0.2mm(墨现科技),贴合复杂曲面关节 。
自供电趋势:摩擦纳米发电机(TENG)与压电材料结合,减少外部电源依赖 。
(三)全球竞争格局与国产化突破
1. 国际竞争态势
梯队分化明显:第一梯队Tekscan、Interlink(美日企业,垄断高精度六维力传感);第二梯队MC10、Philips(医疗电子皮肤主导);第三梯队中韩厂商加速追赶(如韩国JDI光学式皮肤)。
技术壁垒:海外企业在信号抗干扰算法(电容式)和MEMS微加工工艺领先,国产传感器精度误差约5-8%(海外≤3%)。
压敏材料层压力传感器及电子皮肤
2. 中国厂商突围路径
成本优势:墨现科技硅胶电子皮肤成本降低50%,适配国产机器人降本需求。
产学研融合:迅捷兴×南开大学开发“嗅觉-触觉”双模系统,拓展安监/医疗场景 ;复旦视触觉AI传感器灵敏度达0.01N(人类10倍),突破精细操作瓶颈 。材料自主化,祥源新材IXPE基材、沃特股份LCP材料替代进口柔性基底 。
3. 产能与市场响应
(四)挑战与未来方向
1. 技术瓶颈:
多模态信号串扰(温湿度影响压力精度) → 中山大学SSIM传感器通过“岛桥结构”将干扰降至0.2%;
10万次弯折后电阻漂移>20% ,新加坡国立大学m-GLM液态金属填充裂纹方案提升耐久性。
2. 产业协同需求:
标准化缺失:传感器接口协议未统一(如特斯拉Optimus Gen2专用接口);
规模化成本:高端电子皮肤单价超$1,000 → 目标降至$100/台(特斯拉路线)。
3. 增量市场:
人形机器人全身覆盖:单机需求从手部(200cm²)扩展至全身(2m²),2030年其他部位市场达48亿元 ;
神经拟态传感:斯坦福“数字皮肤”探索突触晶体管直接编码生物电信号,响应时间<1ms 。
(五)总结:竞争格局与核心趋势
市场梯队:欧美主导高精度传感,国产凭借成本+定制化切入中端市场,医疗电子皮肤由MC10/Philips垄断。
胜负手要素:材料创新(自修复水凝胶、液态金属);多模态算法解耦能力;卷对卷印刷(R2R)工艺降低量产成本。
未来五年:人形机器人放量(2030年92亿元市场)与医疗贴片(6.5% CAGR)将重塑供应链,中国厂商有望在硅胶集成(墨现科技)与AI融合传感(复旦/迅捷兴)领域实现超车。
六、全球电子皮肤专利综合分析
(一)全球电子皮肤专利态势分析
1. 申请趋势与地域分布
年申请量增长:2020-2025年全球电子皮肤专利年复合增长率达28%,2025年单年申请量突破1,200项。
地域集中度:中国(占比45%)、美国(30%)、日本(15%)、韩国(7%),欧盟(3%)。
中国加速领跑:2025年中国企业/高校专利授权量占比超50%,京东方、复旦大学、清华大学等机构贡献显著。
2. 技术分布(2025年数据)
材料与结构:柔性基底(32%)、导电复合材料(28%)、仿生微结构(20%)。
感知模态:多模态融合(25%)、触觉反馈(22%)、自修复(18%)。
制造工艺:卷对卷印刷(15%)、微纳加工(12%)。
3. 核心申请人TOP5

(二)核心专利技术详解(按技术路线分类)
1. 感知材料与结构创新
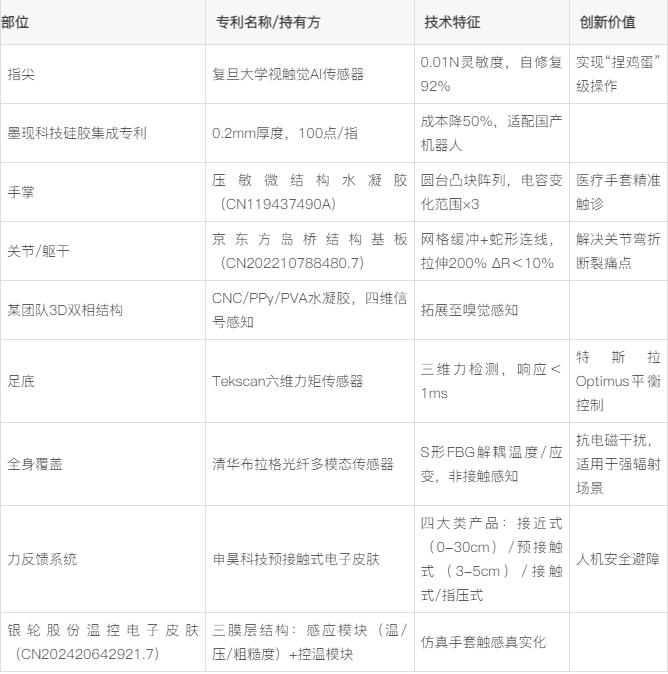
1)京东方:可拉伸岛桥结构基板(CN202210788480.7)
技术方案:衬底上设计“岛区(传感器)-桥区(导电结构)”布局,桥区采用网格缓冲图案+蛇形连接线,拉伸应变达200%时电阻变化率<10%。
创新点:缓冲图案分散应力集中,解决传统蛇形导线弯折断裂问题。
应用:人形机器人关节覆盖,适配特斯拉Optimus Gen2手指弯曲场景。
2)某团队:3D双相结构电子皮肤(Freezing-trapped策略)
方案:冷冻捕获自组装CNC/PPy/PVA水凝胶,构建半封闭多维网络,同步检测应变、压力、气体、温度。
创新:冻结抑制分子扩散→热驱动有序堆叠,灵敏度提升40%,气体检测限达10ppm。
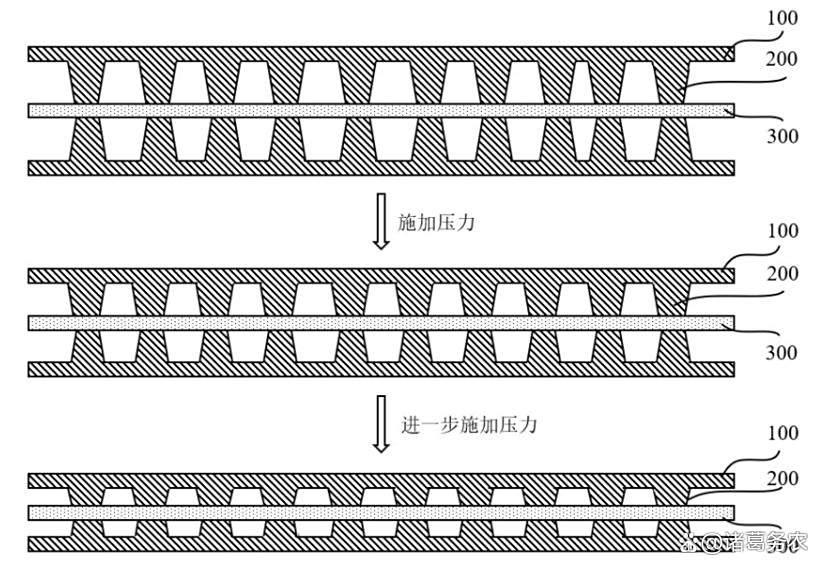
3) 压敏微结构水凝胶(CN119437490A)
方案:聚乙烯醇基底上阵列化圆台凸块,接触面积随压力动态调整,电容变化范围扩大3倍。
优势:生物相容性高,适用于医疗手套(如肿瘤触诊)。
4)祥源新材:IXPE基材超薄柔性基底
特性:厚度0.1mm,耐弯折>10万次,替代进口PDMS降本50%。
2. 多模态融合与信号解耦
5)清华大学深圳院:布拉格光纤多模态传感器(专利号未公开)
结构:四层设计——介电层(微结构硅胶),电场扰动感知接近距离;光纤层(S形FBG),波长位移解耦温度/应变(公式:Δλ/λ₀ = Kε·ε + K_T·ΔT);导电层(银纳米线阵列),采集电/热信号;封装层,透明聚合物。
性能:空间分辨率0.1mm,非接触温度感知误差<0.5℃。
6)复旦大学:视触觉AI传感器(专利号未公开)
方案:摄像头捕捉硅胶粒子位移场 → CNN算法解耦压力/剪切力/扭转力。
指标:灵敏度0.01N(人类10倍),压力范围0.1Pa–100kPa。
7)迅捷兴-南开大学:电子鼻+电子皮肤双模系统
功能:气体识别(VOCs检测限1ppb) + 触觉反馈,用于危化品机器人巡检。
3. 自修复与耐久性提升
8)复旦大学:动态自修复导电聚合物
机制:嵌入可逆Diels-Alder键,室温修复效率>92%,循环寿命提升5倍。
9) 新加坡国立大学:液态金属填充裂纹(iStretch)
方案:石墨烯-液态金属(m-GLM)纳米复合物,裂纹处液态金属自发填充,10,000次拉伸后电阻变化<3%。
10) 汉威科技:自修复水凝胶基底
商业化:年产千万级传感器,供货小鹏机器人手指关节。
4. 制造工艺突破
11) 墨现科技:硅胶一体成型工艺
成果:0.2mm超薄电子皮肤,单指集成100感应点,触发力5g(仿人手级)。
12) 福莱新材:卷对卷涂布工艺
优势:第二代触觉传感器量产成本降低60%,支持压力/剪切力同步感知。
(三) 人形机器人核心专利适配表
以下20项专利覆盖机器人全身感知需求,按部位分类解析:
(四)技术挑战与未来专利方向
1. 现存瓶颈
信号串扰:温湿度对压力检测干扰(中山大学SSIM传感器通过“岛桥结构”降至0.2%)。
耐久性:10⁵次弯折后导电层裂纹扩展(液态金属填充方案待普及)。
成本:高端电子皮肤单价>$1,000 vs. 特斯拉目标$100/台。
2. 前沿专利布局
神经拟态传感:斯坦福“数字皮肤”专利(压力传感器+突触晶体管,生物电直接编码)。
AI-材料协同:生成式模型预测液态金属-聚合物配比(MIT在研专利)。
零功耗传感:摩擦纳米发电机(TENG)与压电材料结合(中国科学院2025年新申请)。
(五)结论
全球电子皮肤专利竞争聚焦三大赛道:
材料革新:自修复水凝胶(复旦)、3D双相结构(余厚咏)、液态金属(新加坡国立)突破耐久性瓶颈;
多模态融合:光纤解耦(清华)、视触觉AI(复旦)实现“接近-接触-温控”全链条感知;
工艺降本:卷对卷涂布(福莱新材)、硅胶一体化(墨现科技)推动规模化应用。
中国机构表现亮眼:京东方岛桥结构、清华光纤传感、复旦自修复技术等专利已跻身全球第一梯队。未来突破需攻克神经拟态编码、极端环境适配及万次循环标准,为人形机器人全身覆盖(2030年92亿元市场)提供技术底座。
【免责声明】本文主要内容均源自公开信息和资料,部分内容引用了Ai,仅作参考,责任自负。