准直太阳光模拟器 | HUD 光照角度和强度的测试应用
HUD(Heads-Up Display)抬头显示器作为现代汽车的重要配置,通过将车速、导航等关键信息投射到驾驶员视线前方的挡风玻璃上,减少视线转移次数,直接关乎驾驶安全性和用户体验。然而,HUD 在实际使用中面临的光照条件复杂多变,不同角度和强度的阳光会显著影响其显示效果。紫创测控Luminbox准直型太阳光模拟器凭借对光照条件的精准复现能力,可为 HUD 光照角度和强度的测试提供可靠的实验平台,有效解决自然光照不可控的难题。
一、HUD 光照角度和强度测试的重要性
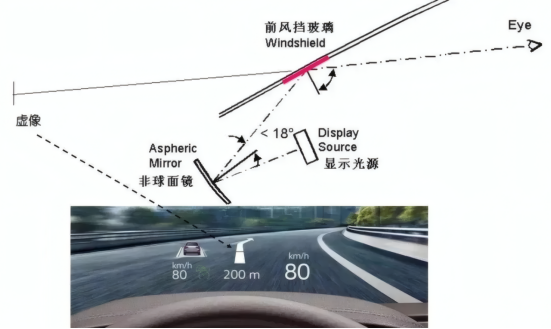
汽车HUD技术
HUD 显示效果受光照影响显著:强光易致显示模糊甚至无法辨认,角度差异会引发亮度不均、对比度下降。如正午强光淹没信息、清晨低角度阳光形成重影干扰判断。对HUD进行光照角度和强度测试,可全面评估其在各种光照条件下的性能表现,确保在复杂环境中始终提供清晰、准确的显示信息。确保复杂环境下信息清晰准确,这是满足安全标准、保障驾驶安全、提升体验及为 HUD 的研发优化提供科学依据。
二、HUD 光照角度和强度的测试方法
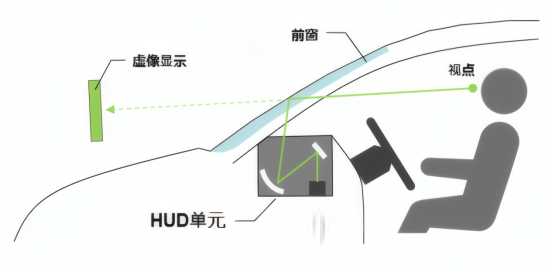
汽车中的HUD抬头显示器
进行 HUD 光照角度和强度测试时,需先确保准直太阳光模拟器各组件正常连接并校准,再根据测试需求调整光照强度、方向及光谱滤波器,模拟不同自然光照条件。具体测试方法如下:
分辨率测试:通过显示标准测试图案,评估 HUD 在不同光照角度(如 0° 直射、45° 斜射)和强度(如 300W/m² 阴天、1000W/m² 晴天)下的清晰度和细节呈现能力,观察图像分辨率变化,确保各种条件下显示清晰。
亮度测试:测量 HUD 显示的亮度和对比度,在不同光照条件下调整 HUD 亮度设置,观察显示效果,确保强光下仍能保持清晰可见,避免过亮刺眼或过暗模糊。
反射测试:调整太阳光模拟器的角度和强度,模拟不同光线条件下的反射情况,评估 HUD 在强光照射下的可视性,确保各种条件下都能保持良好的显示效果。
可视角度测试:在不同光照角度下,观察 HUD 在不同视角下的显示清晰度和色彩准确度,评估其可视角度范围,确保驾驶员在不同姿态下都能清晰查看信息。
投影测试:通过调整模拟器设置,模拟不同光照条件下的投影效果,评估 HUD 图像的聚焦度和失真程度,确保各种条件下投影准确。
三、准直太阳光模拟器在 HUD 测试中的应用
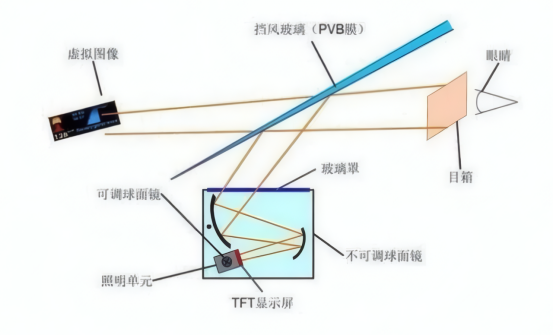
HUD光学系统结构示意图
1. 模拟不同天气条件
通过调整设置模拟晴天、阴天、雨天等天气的光照,测试 HUD 在不同天气下的可见性和性能,评估其环境适应性,确保实际使用中保持良好显示效果。
2. 模拟不同时间段的光照
调节光线强度和方向,模拟早晨、中午、傍晚等不同时间段的太阳光特性,测试 HUD 在各时段的显示效果,保障其在不同时间都能提供准确信息。
3. 优化 HUD 设计
借助准直太阳光模拟器测试,可发现 HUD 在不同光照下的性能瓶颈和潜在问题,为汽车制造商和供应商优化产品设计、提升显示效果和可靠性提供依据。
4. 提高驾驶安全性
通过严格测试,确保 HUD 在各种光照条件下都能提供清晰、准确的信息,减少驾驶员因辨认信息而分散的注意力,从而提高驾驶安全性。
HUD 光照角度和强度测试是评估其性能的重要环节,准直太阳光模拟器凭借精准的光照模拟和控制能力,为测试提供了可靠支撑,助力评估性能、发现问题、优化设计和提升安全性。紫创测控Luminbox准直太阳光模拟器凭借多技术路线和全场景模拟能力,为 HUD 测试提供从可行性研究到项目测试的全场景解决方案。未来,紫创测控Luminbox 将持续技术创新,为智能汽车领域的 HUD 技术发展提供有力支持。
Luminbox 全光谱准直型太阳光模拟器
Luminbox 全光谱准直型太阳光模拟器为跨行业材料提供高精度老化测试与性能验证,能精准模拟自然光环境,支持光谱/ 亮度 / 色温调控。

全光谱覆盖:350nm-1100nm 光谱,贴近自然光权重
高动态亮度:2 米处 20,000-150,000Lux,满足 HUD 亮度响应测试
强光抗扰验证:直射模拟复现图像模糊/ 重影问题场景
多场景适应:支持日间/ 夜间 / 隧道等光照动态切换测试
Luminbox 全光谱准直型太阳光模拟器以精密光学的工程化应用,可有效缩短从基础研究到工业验证的周期,为HUD 光照角度和强度的测试提供可靠的“人工太阳”。将实验室级创新转化为产业化能力,助力能源材料、环境技术、航空航天等领域的技术革新。