扩展卡尔曼滤波EKF、自适应扩展卡尔曼滤波AEKF、HIF/H∞、粒子滤波PF、卡尔曼粒子滤波EKPF在BJDST动态工况下的SOC估计效果
在电动汽车与储能系统中,电池荷电状态(SOC)的精确估计是保障系统安全运行与性能优化的核心环节。然而,实际工况(如BJDST动态循环)中电池模型的强非线性、噪声时变特性及复杂电流波动,对传统估计算法提出了严峻挑战。为应对这一难题,扩展卡尔曼滤波(EKF)通过线性化处理非线性模型,成为经典解决方案;自适应扩展卡尔曼滤波(AEKF)则进一步引入自适应机制,实时调整噪声统计特性,显著提升动态工况下的跟踪精度与鲁棒性。与此同时,H∞滤波(HIF)针对模型不确定性设计,在抗干扰能力上表现突出;粒子滤波(PF)通过蒙特卡洛采样逼近后验概率,适用于强非线性非高斯系统;而卡尔曼粒子滤波(EKPF)则融合EKF与PF优势,以提升状态估计的收敛性与稳定性。本文将详细分析上述算法估计SOC估计的关键代码,为电池管理系统优化提供理论依据与实践参考。
为了大家可以更好的理解几种不同的算法,接下来在描述原理的时候,同时也使用通俗的例子来解释不同的算法。
1. EKF(扩展卡尔曼滤波)的详细比喻
场景: 想象你是一个手机电池管家,每天要估算手机剩余电量(SOC)。你有一个电池模型(比如:每用1小时,电量下降10%),但你知道这个模型并不完美,因为实际使用中电量下降速度会变化(比如玩游戏时掉电快,待机时掉电慢)。
工作过程:
预测阶段(Predict):
你根据当前用电情况(比如当前在玩游戏,每小时掉电15%),预测下一分钟后的电量。比如当前电量是70%,你预测1分钟后电量是69.75%(因为1分钟是1/60小时,15%×1/60=0.25%)。更新阶段(Update):
1分钟后,你查看手机实际显示的电量(通过电压换算得到),发现实际电量是69.8%。你发现预测值(69.75%)和实际值(69.8%)有0.05%的误差。线性化处理:
你知道电池的电压和电量关系不是直线(比如电量低时,同样1%电量变化对应的电压变化更大),但你简化处理:在当前电量70%附近,你假设1%电量变化对应0.02V电压变化(线性近似)。这样你就能用简单的线性关系来计算误差。调整预测:
你根据误差(0.05%)调整你的预测模型,比如稍微调整一下“玩游戏时每小时掉电15%”这个参数,变成14.9%,这样下次预测会更准。
比喻总结:
EKF就像一个电池管家,他根据当前用电情况预测下一刻电量,然后用实际电量读数来修正预测。为了简化计算,他把复杂的电池特性(非线性)在当前点附近用直线(线性)来近似。这样他就能快速调整预测,但前提是电池特性变化不大(比如电池没老化,温度稳定)。
2. AEKF(自适应扩展卡尔曼滤波)的详细比喻
场景: 你是一个智能电池管家,负责管理一部用了两年的手机。你发现随着电池老化,原来的电池模型(比如新电池时每小时掉电10%)已经不准了,现在同样的用电量,实际掉电更快(比如每小时掉电12%)。而且电池老化程度还在变化。
工作过程:
监测误差:
你持续记录预测值和实际值的误差。比如你预测1小时后电量从70%降到60%,但实际发现降到58%(误差2%)。你发现最近一周的预测总是比实际偏高2%左右。自适应调整:
你意识到电池模型已经老化,需要调整。你自动降低对电池模型的信任度(因为模型不准),同时提高对实际测量值的信任度。比如原来你相信模型70%,相信测量30%;现在调整成相信模型50%,相信测量50%。动态优化:
你根据误差大小实时调整信任比例。如果误差变大(比如预测偏高3%),你就更相信测量值(比如模型40%,测量60%);如果误差变小(比如预测偏高1%),你就稍微增加对模型的信任(比如模型60%,测量40%)。更新模型:
你还根据误差趋势更新电池模型参数。比如你发现电池老化导致掉电速度变快,就把模型参数从“每小时掉电10%”更新为“每小时掉电12%”。
比喻总结:
AEKF就像一个聪明的电池管家,他能发现电池老化导致模型不准,然后自动调整策略:减少对旧模型的依赖,更相信实际测量值。同时,他还会根据误差大小动态调整信任比例,并更新电池模型参数,让预测越来越准。
3. HIF(H∞滤波)的详细比喻
场景: 你是一个极端环境下的电池工程师,负责管理火星探测器的电池。火星环境恶劣,温度剧烈变化(-100℃到20℃),而且有宇宙辐射干扰电池电压读数。你的任务是确保电池电量估计绝对可靠,因为探测器一旦电量耗尽就会报废。
工作过程:
最坏情况考虑:
你不追求最精确的估计,而是确保在最坏情况下估计也不会太离谱。比如你估计电量是60%,但实际电量可能在55%-65%之间(误差±5%),你要求这个误差范围必须覆盖所有可能情况(包括极端温度和干扰)。鲁棒性设计:
你设计了一个非常保守的估计策略:即使遇到最大干扰(比如电压读数突然波动10%),你的估计误差也不会超过5%。为了做到这点,你牺牲了一些精度——在正常情况下,你的估计可能不如其他方法精确,但绝不会出现大错误。抗干扰处理:
当你收到一个异常的电压读数(比如突然显示电量从60%跳到50%),你不会立即相信它。你会结合历史数据和电池模型判断:如果当前温度是-100℃,电池电压确实可能突然下降,你就接受这个读数;但如果温度正常,你就认为这是干扰,忽略这个读数。安全边界:
你总是留出安全余量。比如你估计剩余电量能支持探测器工作10小时,但你会告诉地面控制中心“只能工作8小时”,多留2小时作为缓冲,防止意外情况。
比喻总结:
HIF就像一个保守的电池工程师,他不追求最精确的估计,而是确保在最恶劣环境下估计也不会出错。他宁可牺牲一些精度,也要保证估计的可靠性。这种策略特别适合对安全性要求极高的场景,比如航天、医疗设备。
4. PF(粒子滤波)的详细比喻
场景: 你是一个侦探队长,带领100名侦探(粒子)来估算一个神秘电池的剩余电量。这个电池很特殊,它的电压和电量关系非常复杂(非线性),而且受温度、老化等多种因素影响。
工作过程:
初始化侦探:
你让100名侦探各自猜测一个电量值(比如侦探1猜50%,侦探2猜51%,…侦探100猜100%),每个侦探代表一个可能的电量状态。预测阶段:
你告诉所有侦探:“电池正在以1A电流放电,根据电池模型,1分钟后电量会下降0.5%”。每个侦探根据这个信息更新自己的猜测(比如猜50%的侦探更新为49.5%)。测量阶段:
1分钟后,你测量电池电压(比如3.7V),然后告诉所有侦探:“根据电压-电量对照表,3.7V对应的电量可能是48%-52%之间”。每个侦探根据这个信息评估自己的猜测有多靠谱(比如猜49.5%的侦探觉得“我在48%-52%范围内,靠谱程度80%”;猜55%的侦探觉得“我不在范围内,靠谱程度10%”)。重采样阶段:
你淘汰掉不靠谱的侦探(比如猜55%的),让靠谱的侦探(比如猜49.5%的)“繁殖”出多个新侦探(新侦探的猜测值在原侦探附近随机波动)。这样侦探队伍就集中在最可能的电量值附近。结果输出:
你计算所有侦探猜测的平均值(比如49.8%),作为最终的电量估计值。
比喻总结:
PF就像一个侦探队,用大量侦探(粒子)覆盖所有可能的电量状态。通过预测(根据放电模型更新猜测)和测量(根据电压读数评估靠谱程度),不断淘汰不靠谱的侦探,让靠谱的侦探“繁殖”,最终集中在最可能的电量值上。这种方法能处理非常复杂的电池特性,但需要大量计算(管理100名侦探)。
5. EKPF(扩展卡尔曼粒子滤波)的详细比喻
场景: 你是一个智能侦探队长,管理一个电池电量侦探队。你结合了EKF的快速计算和PF的高精度,用更少的侦探实现精准估计。
工作过程:
EKF助手分析:
你先让一个EKF助手快速分析:“根据当前电压3.7V和放电电流1A,真实电量在49%-51%之间的概率最大”。这个助手用线性近似快速缩小了范围。高效部署侦探:
你不需要再让侦探覆盖0%-100%的整个范围,而是只在49%-51%这个小区间内部署侦探(比如侦探1猜49.0%,侦探2猜49.1%,…侦探20猜51.0%)。这样你只需要20名侦探就能达到原来100名侦探的精度。双重优化:
- EKF优化: 助手用线性近似快速锁定高概率区间,节省了计算资源。
- PF优化: 侦探队在小范围内用粒子滤波精确估计,处理了非线性问题。
结果输出:
你计算20名侦探猜测的平均值(比如49.85%),作为最终电量估计。这个结果既精确(因为侦探集中在小范围内),又高效(因为侦探数量少)。
比喻总结:
EKPF就像一个智能侦探队,先用EKF助手快速锁定高概率区间(比如49%-51%),然后在这个小区间内部署少量侦探(20名)进行精确估计。这样既保持了PF的高精度(能处理复杂非线性),又大大减少了计算量(因为侦探数量少)。它结合了EKF的效率和PF的精度,特别适合需要高精度但计算资源有限的场景(比如高端电动车)。
1.共有初始化部分
n = 4; % 状态维度
N = length(t);
Q = 0.000000000001; % 过程方差
W = sqrt(Q)*randn(n,N);
R = 0.01; % 测量方差
V = sqrt(R)*randn(1,N);
s = [0;0;0;1];
x = [0;0;0;0.6];
xV = zeros(n,N); % 最优估计值
sV = zeros(n,N); % 真实值
zV = zeros(n,N); % 状态测量值
zIV = zeros(n,N); % 电流激励
z1v = zeros(1,N);
- 状态维度:n=4,表示状态向量有4个分量(RC网络的电压、SOC)。
- 时间点数:N,由时间向量t的长度决定。
- 过程噪声方差:Q非常小(1e-12),说明过程噪声很小。
- 测量噪声方差:R=0.01,相对较大。
- 真实状态初始值:s=[0;0;0;1],其中最后一个分量(SOC)初始为1(100%)。表示从满电开始进行放电。
- 估计状态初始值:x=[0;0;0;0.6],SOC初始估计为0.6(60%)。
- 存储变量:xV(估计值)、sV(真实值)、zV(测量值)、zIV(电流激励)、z1v(可能用于存储端电压估计值)。
2.EKF初始化
P_ekf = eye(n);
3.AEKF初始化
- 协方差矩阵初始化:P_ekf为单位矩阵,表示初始状态估计的不确定性。
q0 = zeros(n,1); % 更新的状态噪音
r0 = 1; % 更新的测量噪音
b = 0.97; % sage-husa更新用
T = 0.01*eye(n);
P_aekf = eye(n);
- 自适应参数:q0(状态噪声初始估计)、r0(测量噪声初始估计)、b(遗忘因子,用于Sage-Husa自适应滤波)。
- T矩阵:用于噪声更新的协方差矩阵。
- 协方差矩阵:P_aekf初始化为单位矩阵。
4.HIF初始化
L = 0.1; %倒数是边界,但是L越大,K越小,失去纠偏能力
%S = [0.2 0 0 0;0 0.2 0 0;0 0 0.2 0;0 0 0 0.5]; %未知
S=1;
P_hif = eye(n);
L:H_inf滤波器的性能边界参数,L越大,滤波器增益越小,纠偏能力越弱。S:H_inf滤波器的权重矩阵,这里设为1(标量),也可以是对角矩阵。P_hif:HIF的初始协方差矩阵,单位矩阵。
5. PF初始化
x1 = [0;0;0;1];
NN = 100;
Nth =100; %重采样阈值
xhatPart = x1;
P_pf = eye(n);
xpart = zeros(n,NN);
xhatPartArr = zeros(n,N); %存储估计的SOC值
xpartminus = zeros(n,NN);
for i = 1 : NNxpart(:,i) = x1 + sqrt(Q)* randn(n,1);
end
x1:PF的初始状态估计,设为[0;0;0;1](SOC=100%)。NN:粒子数,100个。Nth:重采样阈值,当有效粒子数低于此值时进行重采样。xhatPart:当前的状态估计(单个粒子)。P_pf:PF的初始协方差矩阵,单位矩阵。xpart:粒子矩阵,每列代表一个粒子的状态。xhatPartArr:存储每个时间步的状态估计(用于后续绘图)。xpartminus:预测步的粒子矩阵。- 循环初始化粒子:每个粒子由初始状态加上高斯噪声(均值为0,标准差为sqrt(Q))生成。
6. EKPF初始化
R_ekpf =2;
ekpfxhatPart = x;
ekpfxpart = zeros(n,NN);
ekpfp = zeros(n,n,NN);
ekpfxhatPartArr = zeros(n,N); %存储估计的SOC值
z1v_ekpf = zeros(1,N);
for i = 1 : NNekpfxpart(:,i) = x + sqrt(Q)* randn(n,1);ekpfp(:,:,i) = eye(n);
end
ekpfpupdate = ekpfp;
ekpfxpartupdate = ekpfxpart;
R_ekpf:EKPF的测量噪声方差,设为2。ekpfxhatPart:EKPF的初始状态估计,设为x([0;0;0;0.6])。ekpfxpart:粒子矩阵,初始化方式与PF类似。ekpfp:每个粒子的协方差矩阵,三维矩阵(n×n×NN),初始为单位矩阵。ekpfxhatPartArr:存储状态估计。z1v_ekpf:存储EKPF的端电压估计。- 循环初始化粒子和协方差矩阵。
ekpfpupdate和ekpfxpartupdate:更新后的粒子和协方差矩阵。
7. 初始函数(定义电池模型)
R0 = @(x)(-0.07495*(x(4))^4+0.2187*(x(4))^3-0.1729*(x(4))^2+0.01904*(x(4))+0.1973);
R1 = @(x)(0.07826*(x(4))^4-0.2208*(x(4))^3+0.217*(x(4))^2-0.08761*(x(4))+0.01664);
R2 = @(x)(0.1248*(x(4))^4-0.2545*(x(4))^3+0.1254*(x(4))^2-0.03868*(x(4))+0.05978);
C1 = @(x)(2431*(x(4))^4-4606*(x(4))^3+3084*(x(4))^2-589*(x(4))+209.8);
C2 = @(x)(681.1*(x(4))^4-3197*(x(4))^3+4595*(x(4))^2-3114*(x(4))+1444);
U_HPPC_OCV = @(x)(4.715*(x(4))^5-14.53*(x(4))^4+16.32*(x(4))^3-8.031*(x(4))^2+2.438*(x(4))+3.247);
U_OCV = @(x)(0.008488*(x(4))^5-0.03224*(x(4))^4+0.004118*(x(4))^3+0.06053*(x(4))^2+0.2167*(x(4))+3.683);
h = @(x)(4.715*(x(4))^5-14.53*(x(4))^4+16.32*(x(4))^3-8.031*(x(4))^2+2.438*(x(4))+3.247-x(3)-x(2)-x(1)); % 测量方程A = [0 0 0 0;0 exp(-1/(R1(x)*C1(x))) 0 0;0 0 exp(-1/(R2(x)*C2(x))) 0;0 0 0 1];
B = [R0(x);R1(x)*(1-exp(-1/(R1(x)*C1(x))));R2(x)*(1-exp(-1/(R2(x)*C2(x))));-1/3.18/3600];
As = [0 0 0 0;0 exp(-1/(R1(s)*C1(s))) 0 0;0 0 exp(-1/(R2(s)*C2(s))) 0;0 0 0 1];
Bs = [R0(s);R1(s)*(1-exp(-1/(R1(s)*C1(s))));R2(s)*(1-exp(-1/(R2(s)*C2(s))));-1/3.18/3600];
- 定义了电池模型的参数(R0, R1, R2, C1, C2)和OCV(开路电压)函数,它们都是SoC(x(4))的函数。
h:测量方程,计算端电压(OCV减去两个RC网络的电压降)。A和B:状态方程的系数矩阵,依赖于当前状态x(特别是SoC)。状态方程为:x_k = Ax_{k-1} + BI_k + w_k,其中I_k是电流。As和Bs:使用真实状态s计算的系数矩阵,用于生成真实状态序列。
8. 真实值估计
sV = sV_fucn(As,Bs,s,sV,N,I,Q,n);
- 调用函数
sV_fucn生成真实状态序列sV,使用真实模型(As, Bs)和初始状态s,并加入过程噪声。
9. 加入算法(运行各种滤波器)
[xV,z,z1v] = EKF_fucn(n,Q,R,I,z,x,P_ekf,xV,zV,zIV,z1v,A,B,h,N);
[xV_aekf,z_aekf,z1v_aekf] = AEKF_fucn(n,Q,R,q0,r0,I,z,x,P_aekf,xV,zV,zIV,z1v,b,T,A,B,h,N);
[xV_hif,z_hif,z1v_hif] = HIF_fucn(n,Q,R,z,x,P_hif,xV,zV,zIV,z1v,L,S,A,B,h,N,I);
[xV_pf,z1v_pf] = PF_fucn(n,Q,R,W,t,I,z,x1,P_pf,xpart,xhatPartArr,xhatPart,xpartminus,z1v,N,NN,Nth,A,B,h);
[xV_ekpf,zlv_ekpf] = EKPF_fucn(n,Q,R_ekpf,I,z,x,ekpfp,ekpfxpart,ekpfxhatPartArr,ekpfxhatPart,ekpfxpartupdate,z1v,N,NN,Nth,A,B,h);- 分别调用五种滤波算法的函数:EKF、AEKF、HIF、PF、EKPF。
- 每个函数返回状态估计序列(如xV)和端电压估计序列(如z1v)。
10. 计算安时积分法的SOC(作为对比)
soc = zeros(1,N);
soc(1) = 1;
for k = 2:Nsoc(k) = soc(k-1)+I(k)/3.18/3600;
end
- 安时积分法计算SoC:初始SoC为1,然后根据电流积分(除以容量3.18Ah和时间单位转换3600)更新SoC。
11. 误差分析
% RMSE
RMSE_AH = sqrt(sum((soc-sV(4,:)).^2)/N);
RMSE_EKF = sqrt(sum((xV(4,:)-sV(4,:)).^2)/N);
RMSE_AEKF = sqrt(sum((xV_aekf(4,:)-sV(4,:)).^2)/N);
RMSE_HIF = sqrt(sum((xV_hif(4,:)-sV(4,:)).^2)/N);
RMSE_PF = sqrt(sum((xV_pf(4,:)-sV(4,:)).^2)/N);
RMSE = [RMSE_EKF,RMSE_AEKF,RMSE_HIF,RMSE_PF]';
RMSE_EKPF = sqrt(sum((xV_ekpf(4,:)-sV(4,:)).^2)/N);
% MAE
MAE_AH = sum(abs(soc-sV(4,:)))/N;
MAE_EKF = sum(abs(xV(4,:)-sV(4,:)))/N;
MAE_AEKF = sum(abs(xV_aekf(4,:)-sV(4,:)))/N;
MAE_HIF = sum(abs(xV_hif(4,:)-sV(4,:)))/N;
MAE_PF = sum(abs(xV_pf(4,:)-sV(4,:)))/N;
MAE = [MAE_EKF,MAE_AEKF,MAE_HIF,MAE_PF]';
MAE_EKPF = sum(abs(xV_ekpf(4,:)-sV(4,:)))/N;
% MAXE
MAXE_AH = max(abs(soc-sV(4,:)));
MAXE_EKF = max(abs(xV(4,:)-sV(4,:)));
MAXE_AEKF = max(abs(xV_aekf(4,:)-sV(4,:)));
MAXE_HIF = max(abs(xV_hif(4,:)-sV(4,:)));
MAXE_PF = max(abs(xV_pf(4,:)-sV(4,:)));
MAXE = [MAXE_EKF,MAXE_AEKF,MAXE_HIF,MAXE_PF]';
MAXE_EKPF = max(abs(xV_ekpf(4,:)-sV(4,:)));
- 计算安时积分法(AH)和五种滤波算法的SoC估计的均方根误差(RMSE)、平均绝对误差(MAE)和最大误差(MAXE)。
12. 绘制图形
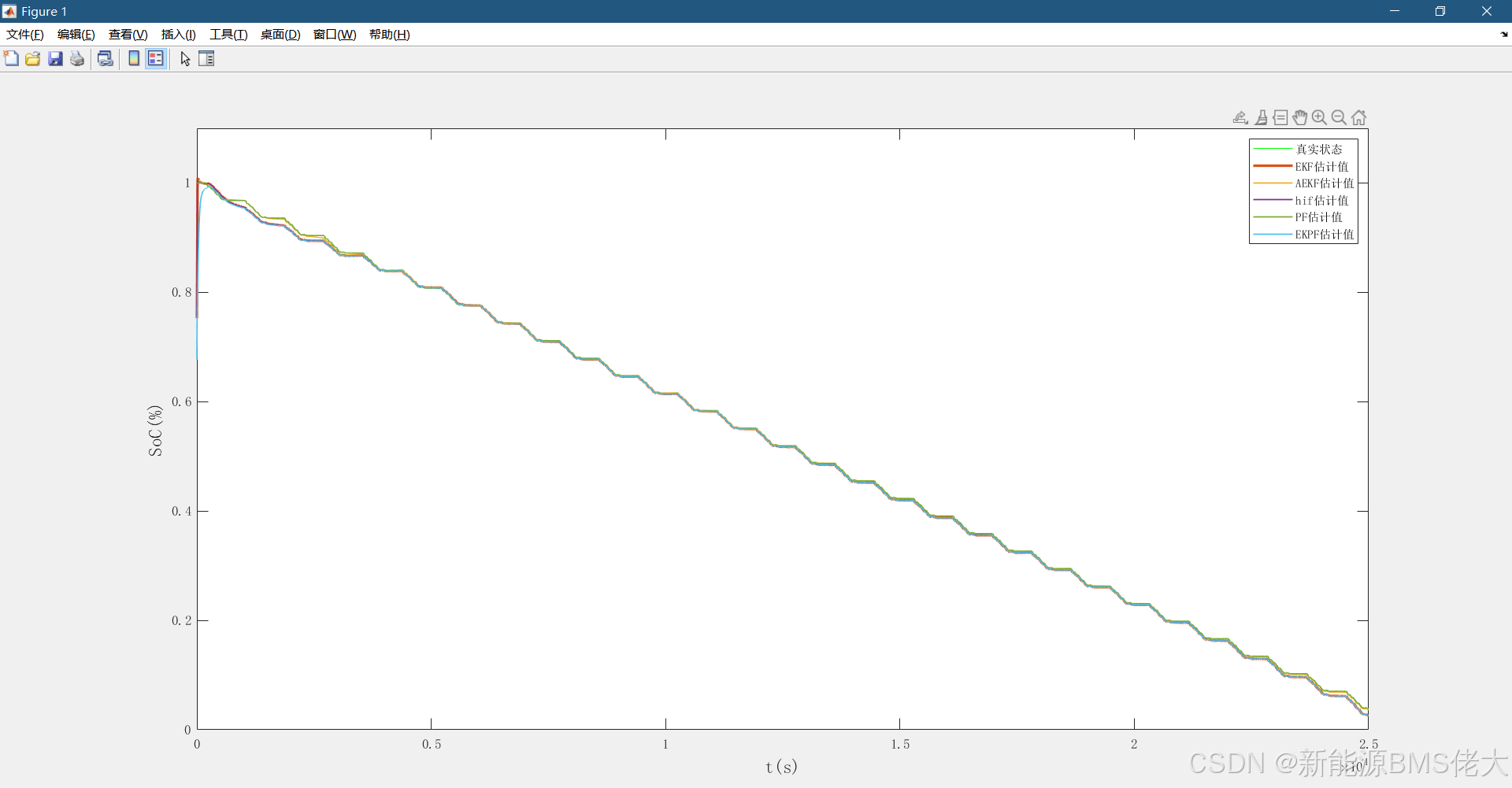
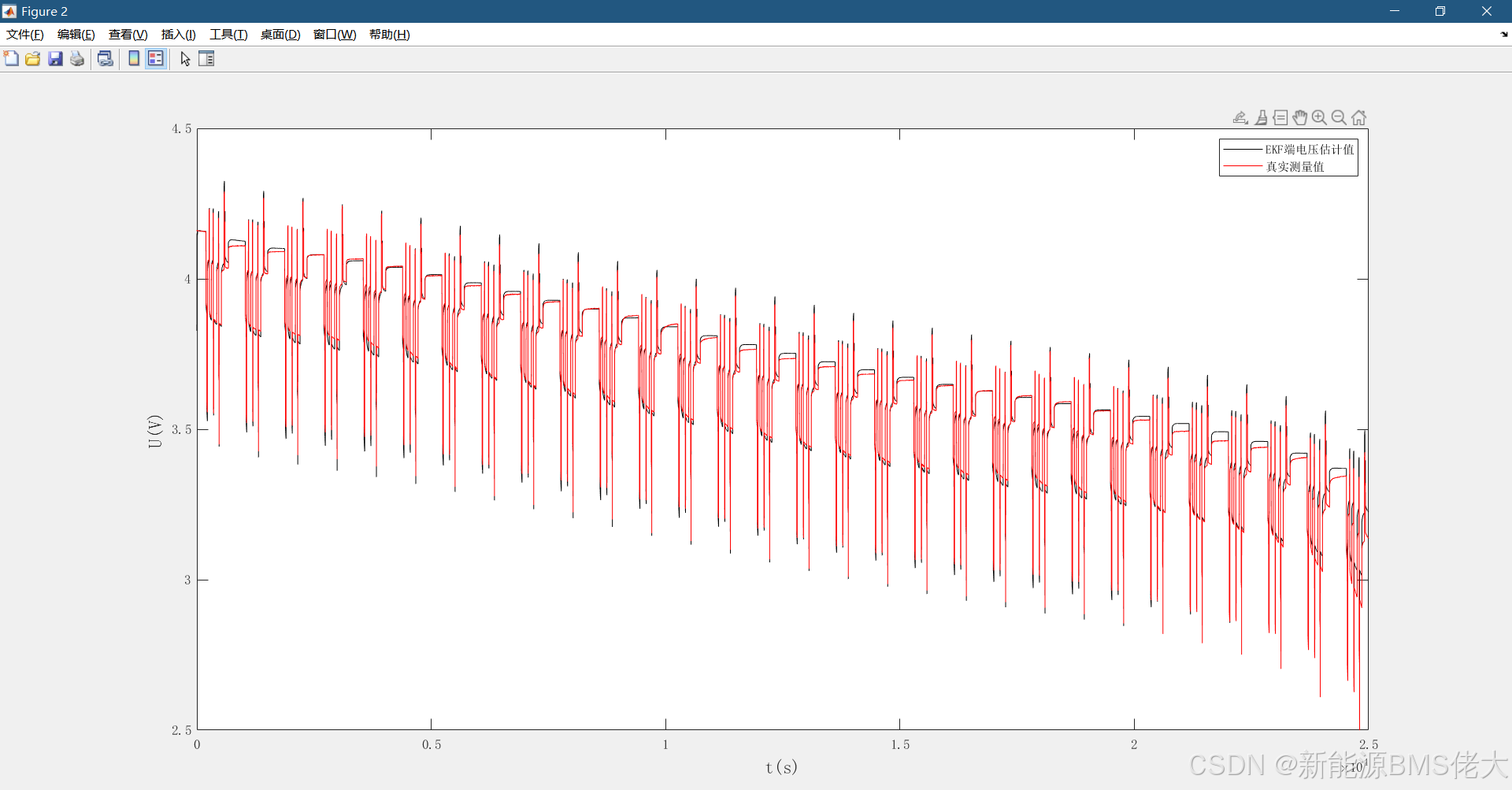
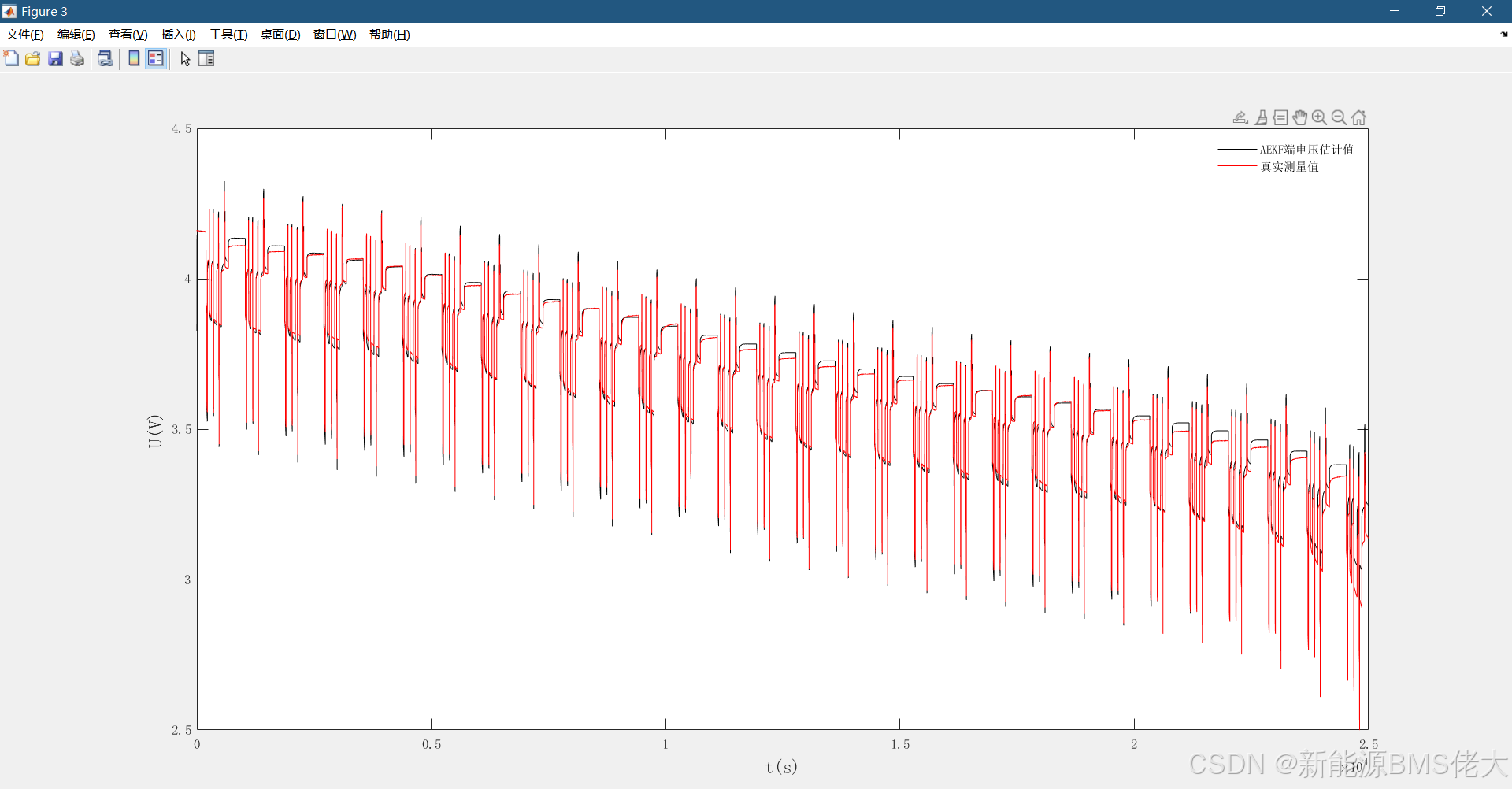
代码中包含多个figure,分别绘制:
- Figure 1:真实SoC和各算法估计的SoC随时间变化曲线
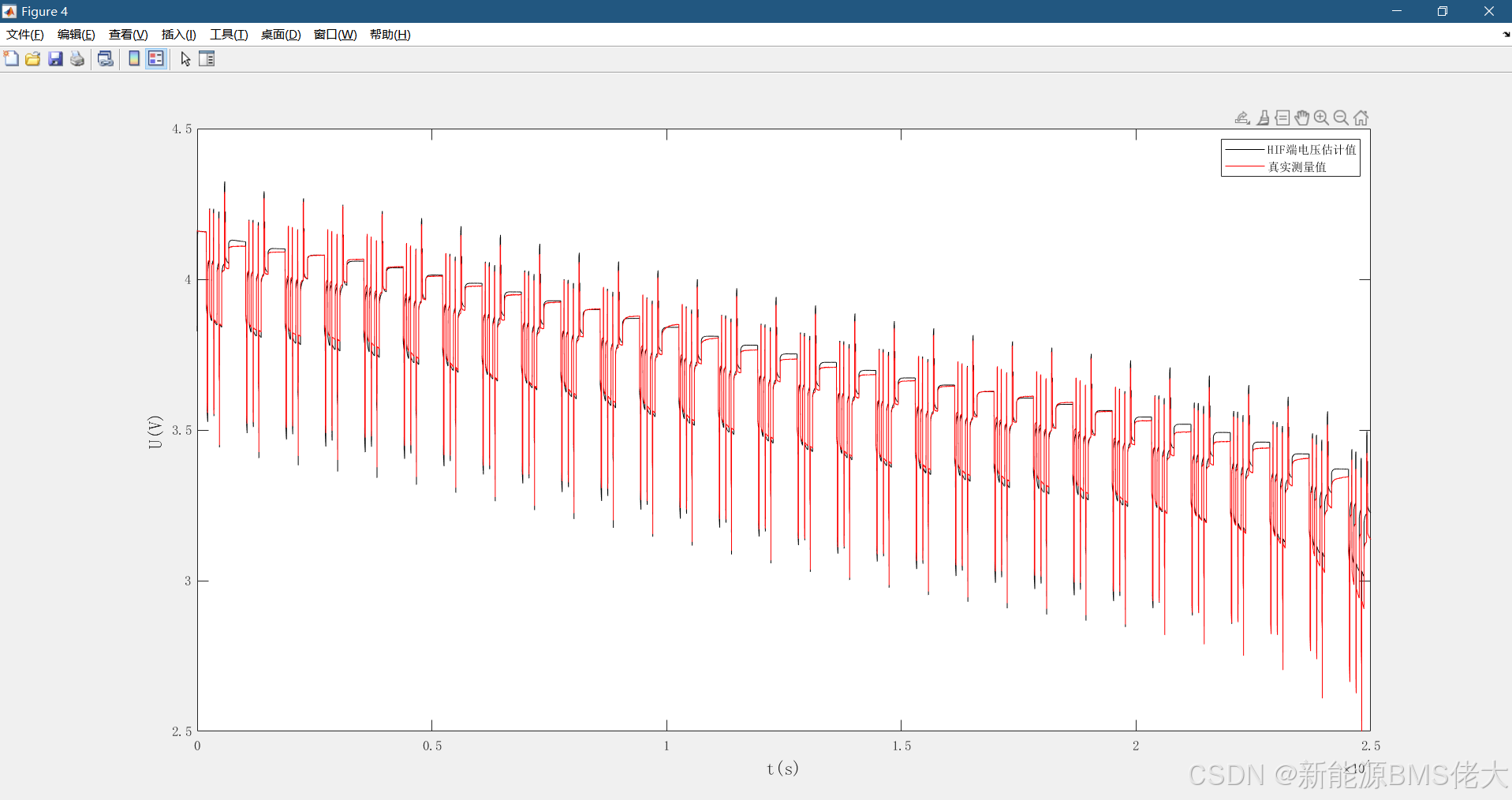
- Figure 2-5:EKF、AEKF、HIF、PF估计的端电压与真实测量值的对比
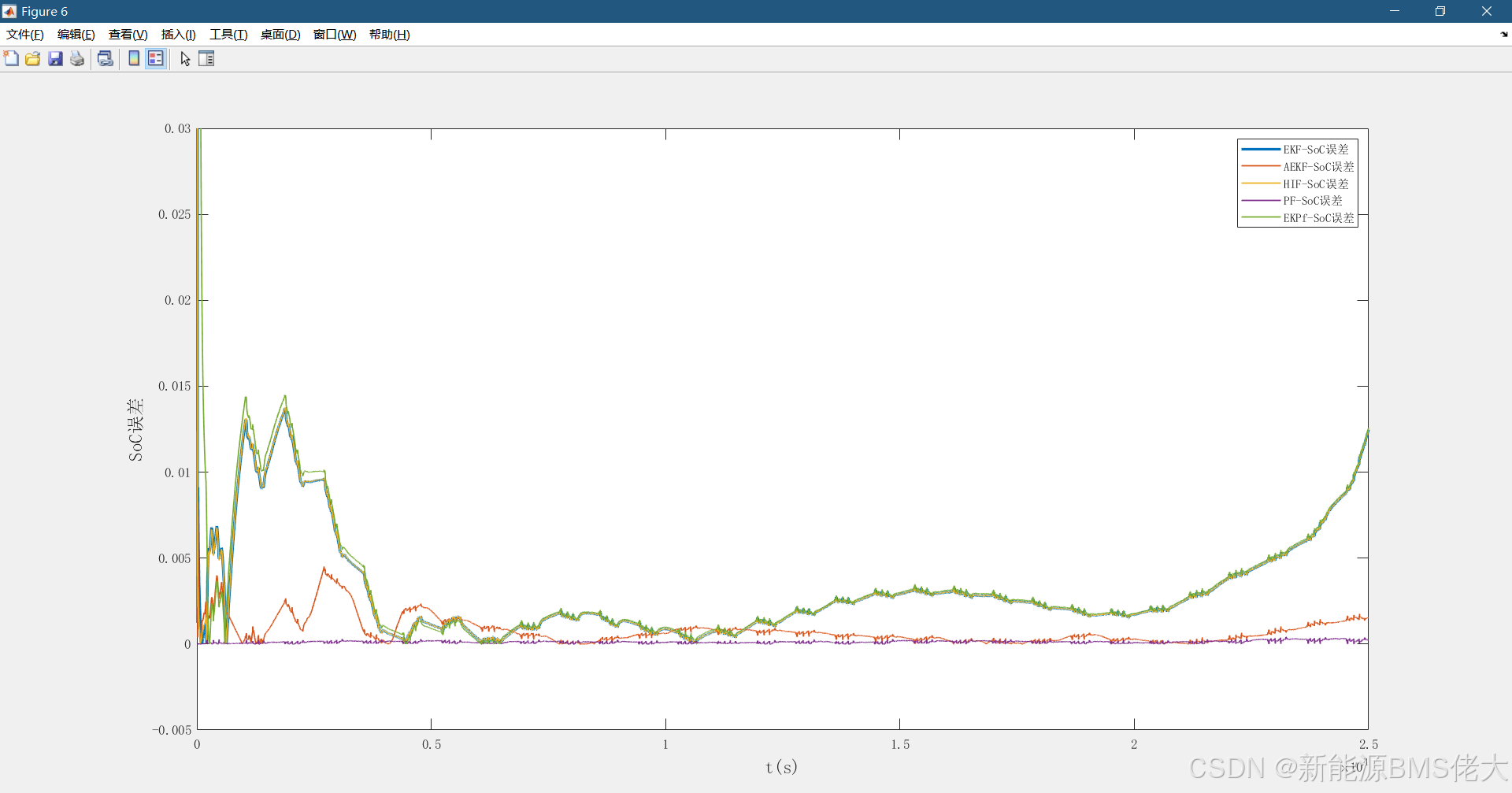
- Figure 6:各算法SoC估计的绝对误差
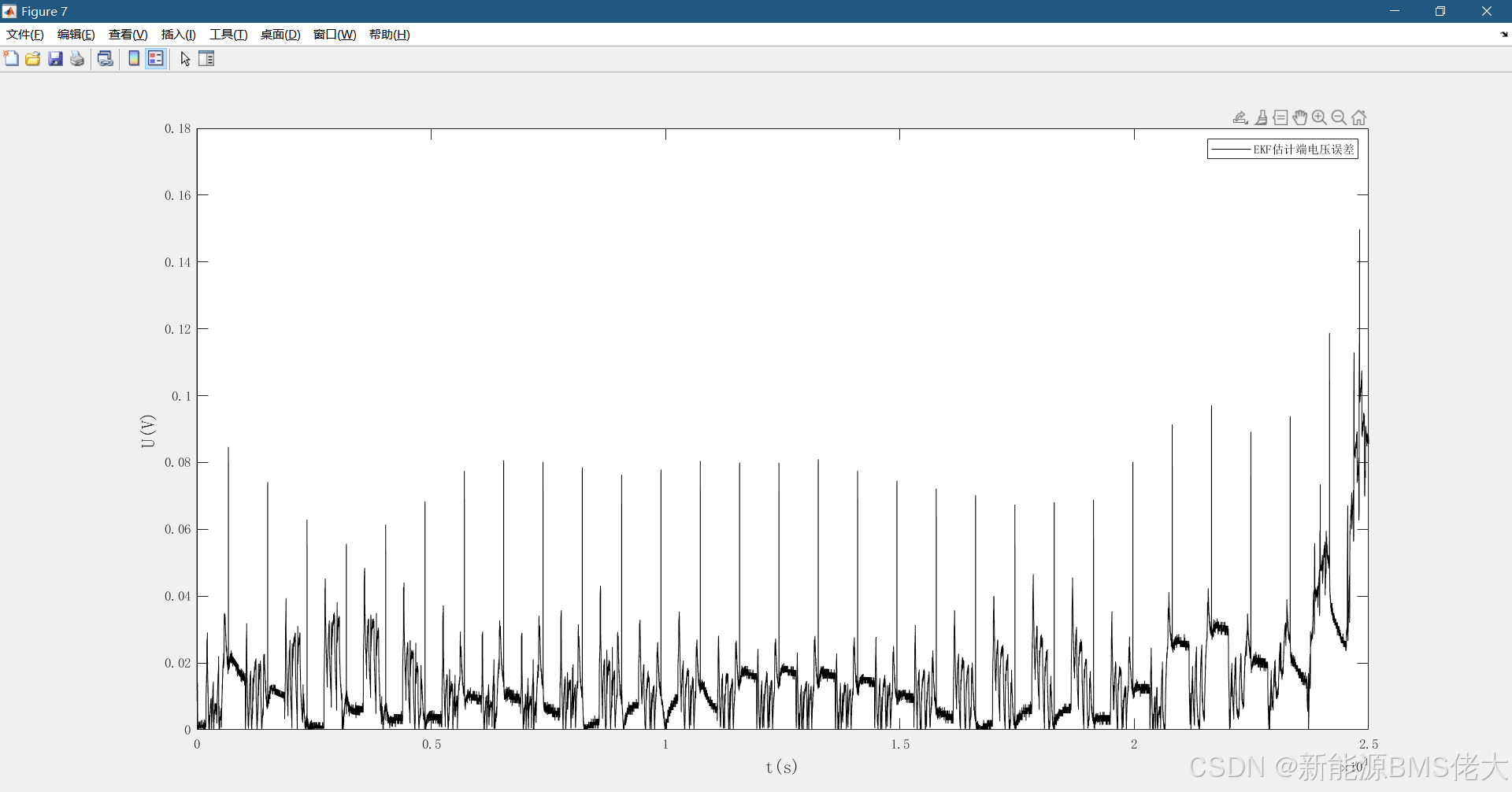
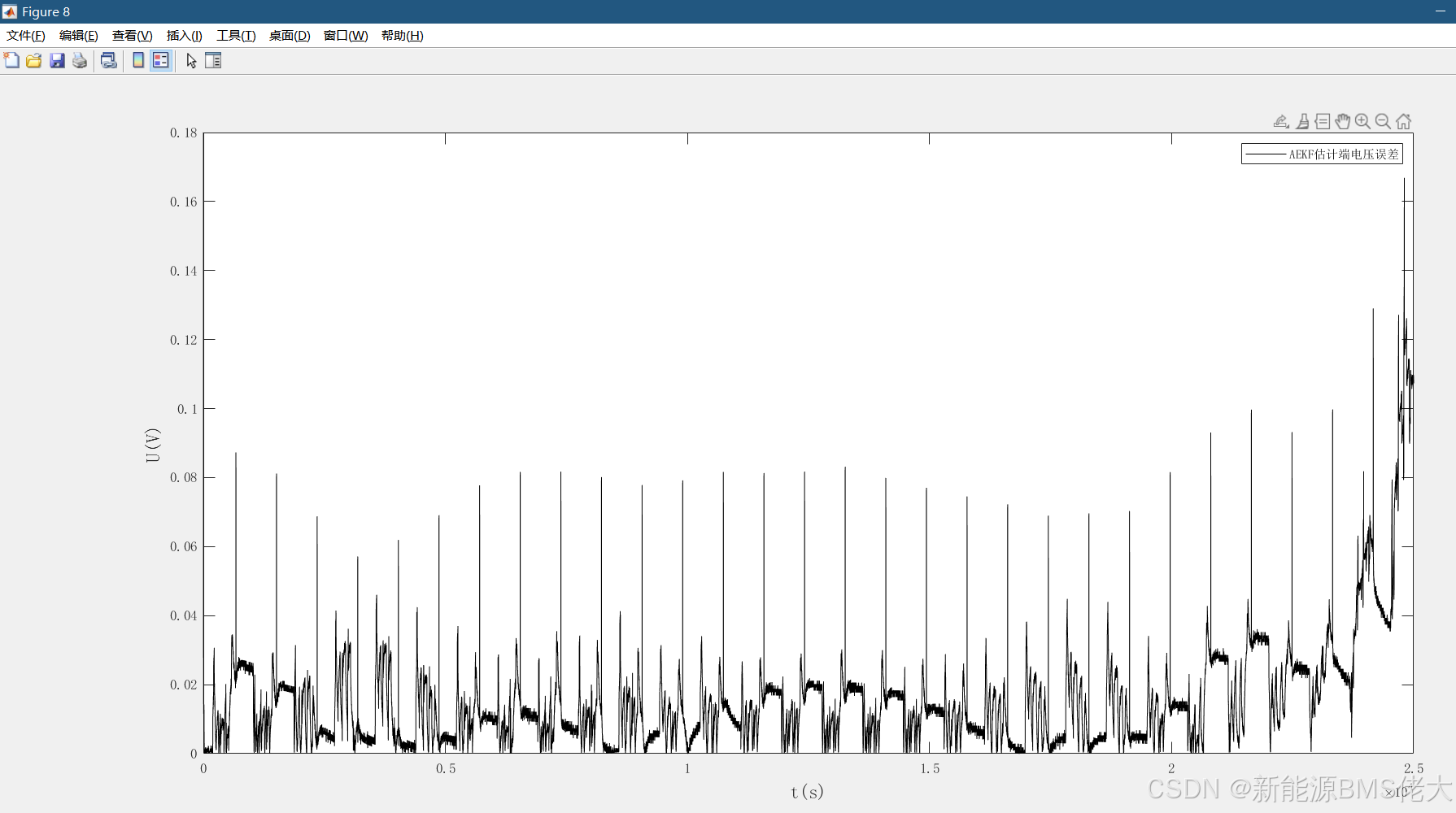
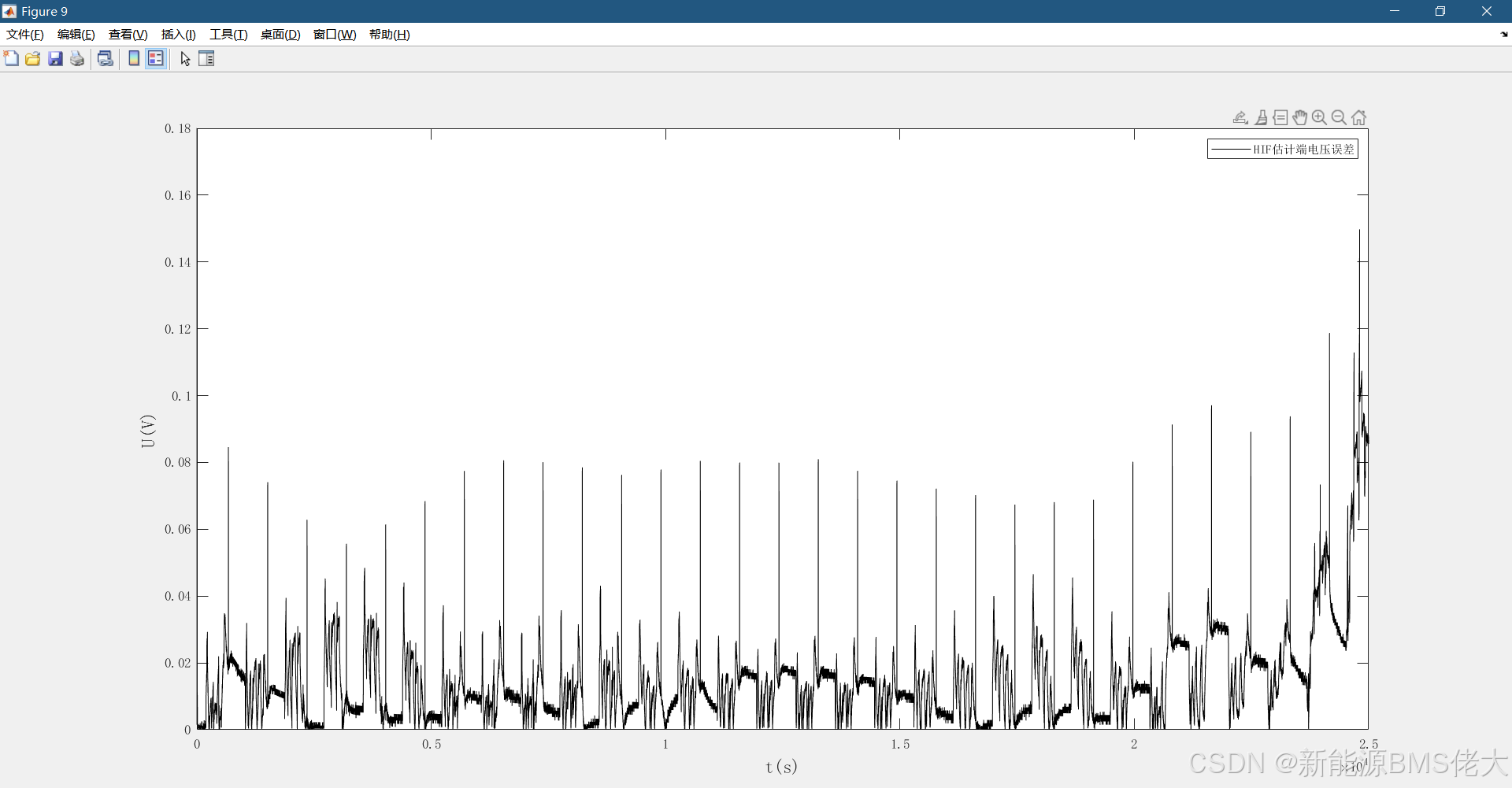
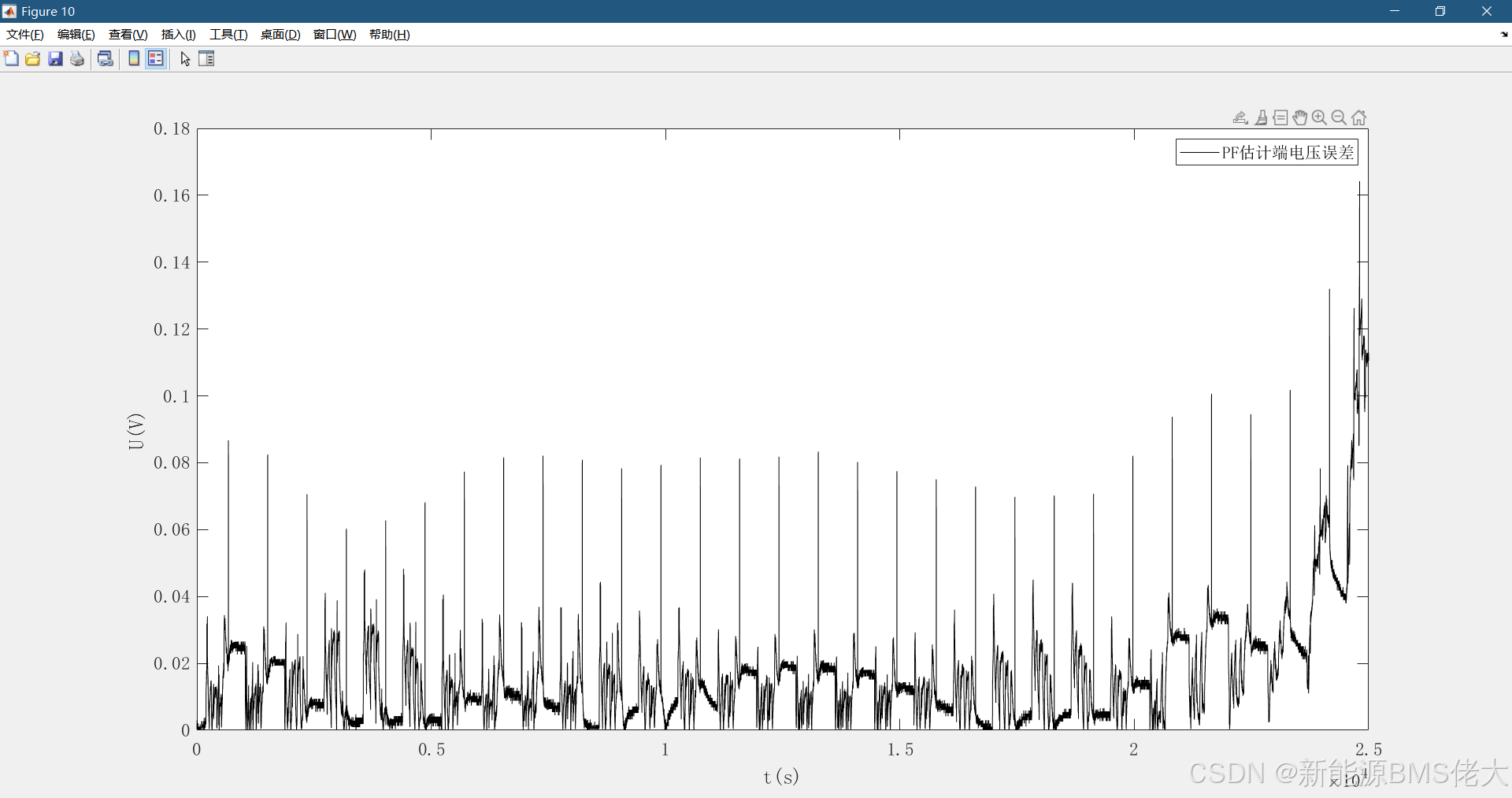
- Figure 7-10:EKF、AEKF、HIF、PF端电压估计的绝对误差
相关代码模型资料点赞评论关注后吗,私信我获取。