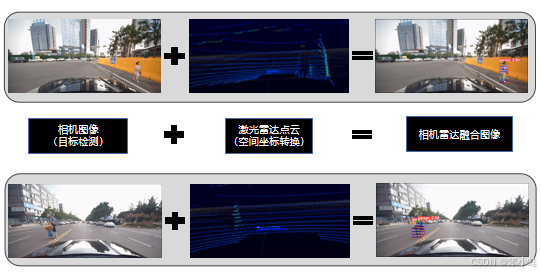
激光雷达与可见光相机的图像融合
目录
硬件准备:速腾聚创16线激光雷达、120°无畸变USB相机。
一、数据采集
1、点云数据采集:
2、图像数据采集:
二、联合标定
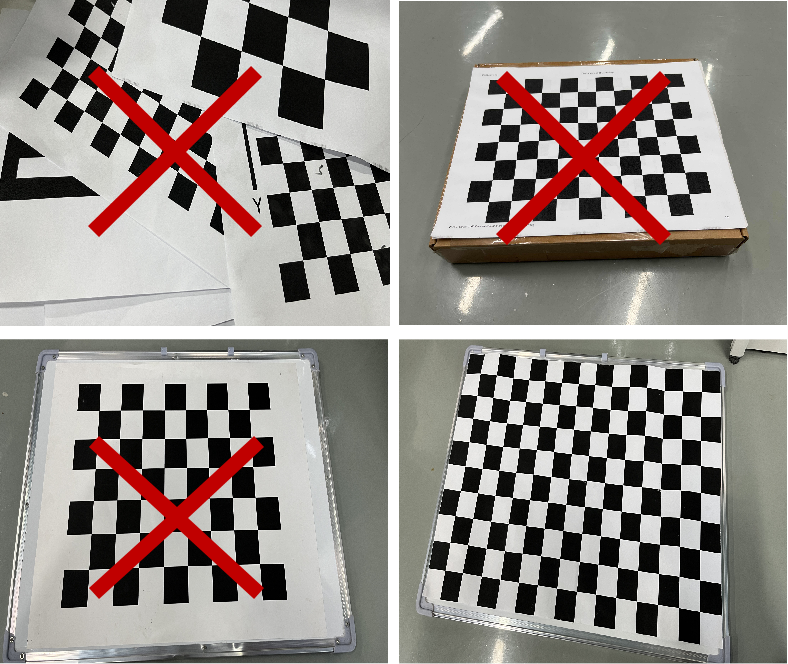
1、标定板制作
2、相机标定
3、相机雷达联合标定
三、算法融合——映射雷达点云到相机图像
1、配置环境
2、 启动激光雷达和相机
3、功能模块详细介绍
四、 未来工作展望
硬件准备:速腾聚创16线激光雷达、120°无畸变USB相机。
一、数据采集
1、点云数据采集:
1、使用抓包工具wireshark获取激光雷达IP(本次使用的激光雷达IP为192.168.1.201,MSOP端口6699,DIFOP端口7788,后续无需抓取可直接使用);
2、官网下载激光雷达软件RSView并配置IP、MSOP和DIFOP端口号以及本地PC的IPv4地址(192.168.1.102),子网掩码(255.255.255.0);
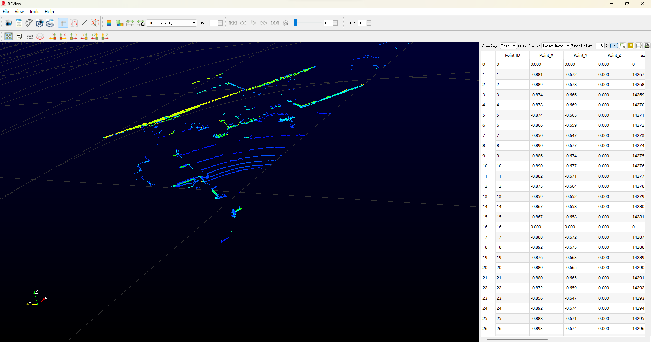
3、软件内置保存格式有pcap和csv格式,保存需要的数据,并编写代码将其转化成pcd格式。
注:使用RSView在线读取雷达功能必须关闭防火墙。