深入解析SAE自动驾驶分级标准(0-5级)及典型落地实例
摘要:本文基于SAE J3016国际标准,系统解读自动驾驶6大等级核心技术差异,结合特斯拉、奔驰、百度Apollo等企业实例分析产业落地现状,并探讨关键技术挑战与未来趋势。
一、为什么需要自动驾驶分级标准?
自动驾驶技术复杂度呈指数级增长,明确责任边界和技术能力范围至关重要。SAE International(国际汽车工程师协会)制定的 J3016标准 已成为全球公认的自动驾驶等级划分框架,其核心依据三个维度:
动态驾驶任务(DDT)执行主体
环境监控(OEDR)责任方
系统失效时的接管要求
标准演进:2021年SAE更新标准,明确L0-L2级称为“驾驶员辅助系统”,L3-L5级才可称为“自动驾驶系统”
二、SAE自动驾驶等级详解
L0级:应急辅助(人类全责)
功能:仅提供预警(如FCW碰撞预警/LDW车道偏离预警)
实例:丰田TSS-P系统基础版,仪表盘触发视觉/声音告警
L1级:部分驾驶辅助(人类监控)
功能:单一维度的控制辅助(纵向 或 横向)
实例:本田Accord的ACC自适应巡航(控制车速) + LKA车道保持(控制方向)独立工作
L2级:组合驾驶辅助(人类监控)
技术突破:横向+纵向协同控制(如TJA交通拥堵辅助)
责任边界:驾驶员必须随时接管
实例:
特斯拉Autopilot(8摄像头+12超声波雷达)
小鹏NGP自动导航辅助驾驶(高速场景)
L3级:有条件自动驾驶(责任转移临界点)
革命性变化:系统在ODD内承担驾驶责任
ODD限制:需明确运行条件(如高速/拥堵路段/白天)
实例:
梅赛德斯-奔驰DRIVE PILOT(全球首个量产L3):
*运行条件:德国高速路,车速≤60km/h,高精地图覆盖区域*华为ADS 4.0:国内首个L3认证系统,支持高速脱手脱眼
L4级:高度自动驾驶(特定场景无人化)
核心特征:在限定区域内实现完全无人驾驶
责任主体:车企/运营商承担事故责任
典型落地场景:
场景 代表案例 技术方案 Robotaxi 百度Apollo(北京亦庄) 5G+V2X+激光雷达冗余 无人货运 图森未来(美国亚利桑那州) L4级卡车编队行驶 自主泊车 比亚迪“天神之眼” 记忆泊车+停车场高精地图
L5级:完全自动驾驶(终极目标)
理想状态:全域全场景无人驾驶(无方向盘/踏板)
当前挑战:极端天气(暴雨暴雪)、非结构化道路(乡村土路)
实验进展:Waymo第五代系统在旧金山测试中应对雨雾能力提升40%
三、关键技术差异对比
传感器配置演进
L1-L2依赖摄像头/毫米波雷达,L3+标配激光雷达和高精地图
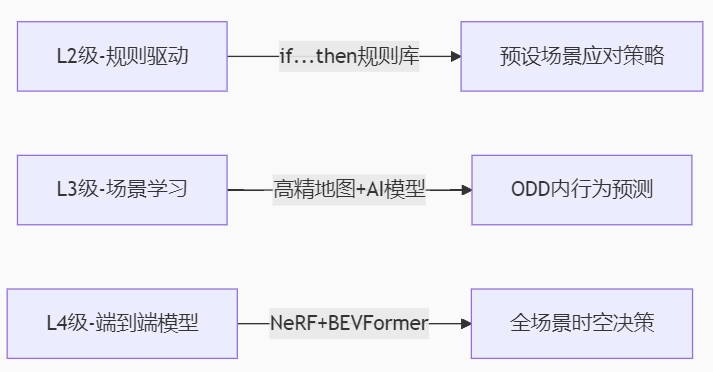
决策规划架构差异
四、产业落地挑战
法规滞后:中国L3法规2023年11月才在工信部《试点通知》中破冰
成本瓶颈:L4级传感器套件成本>$20,000(Waymo第五代系统)
长尾问题:0.1%的极端场景(如横穿马车的婚礼队伍)需百万级里程验证
💡 创新方案:奔驰L3启用松石绿色指示灯(UN ECE R159认证),向周围车辆传递自动驾驶状态
五、开发者资源推荐
仿真工具:
CARLA(L4决策规划仿真):[GitHub链接]
Apollo CyberRT(百度开源框架):[文档链接]
数据集:
nuScenes(L2+感知训练数据集)
Waymo Open Dataset(L4级多传感器融合数据)
结语
从L2到L3的本质是 责任归属从人转向机器。2024年华为ADS 4.0、奔驰DRIVE PILOT的量产标志着L3商业化元年开启。未来三年竞争焦点将集中在:
城市NOA的ODD扩展(小鹏→全国50城)
L4级泊车/高速Robotaxi的泛化能力
车路云一体化架构(广汽埃安+中国移动试点)