使用HalconDotNet实现异步多相机采集与实时处理
文章目录
- 一、核心功能与原理
-
- 功能目标:
- 工作原理:
- 关键机制:
- 二、完整C#实现代码
- 三、关键实现解析
-
- 1. 零拷贝图像传输
- 2. 动态帧率控制
- 3. HALCON并行优化
- 4. 异常隔离机制
- 四、高级优化策略
-
- 1. 硬件加速配置
- 2. 内存池管理
- 3. 实时性保障
一、核心功能与原理
功能目标:
- 多相机并行控制:同时管理多个工业相机(不同品牌/接口)
- 零延迟采集:保证连续帧采集不丢帧
- 实时处理流水线:采集与处理解耦,避免阻塞
- 动态负载均衡:根据处理能力调整采集频率
- 异常隔离:单相机故障不影响整体系统
工作原理:
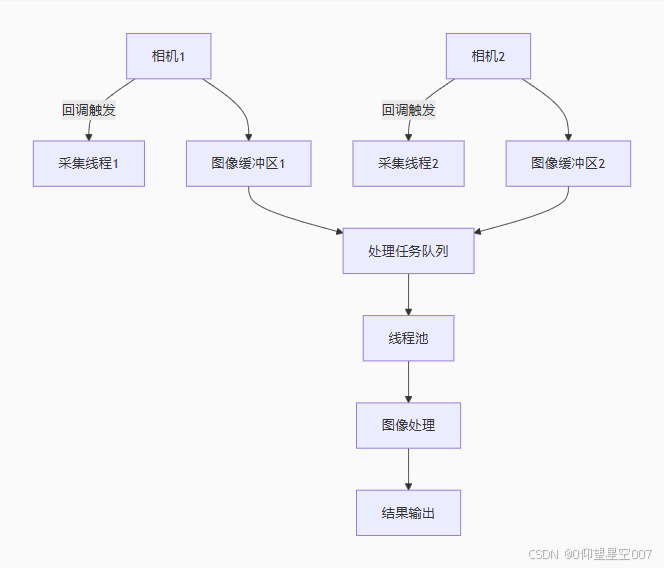
关键机制:
- 回调驱动采集:相机SDK触发图像就绪事件
- 双缓冲策略:采集与处理使用独立内存区
- 生产者-消费者模型:采集线程为生产者,处理线程为消费者
- 线程池管理:动态分配处理资源
二、完整C#实现代码
using System;
using