Stereolabs ZED相机 选型指南:双目 / 单目、短距 / 长距,如何为机器人视觉系统匹配最优方案?

在自动化与机器人技术快速发展的领域,精准的环境感知是提升效率的关键。StereoLabs 推出的ZED X系列(含ZED X、ZED X Mini、ZED X One),依托ZED 双目3D相机技术,为农业、制造业、物流等场景提供可靠的立体视觉支持。
一、工业级可靠性,应对复杂环境挑战
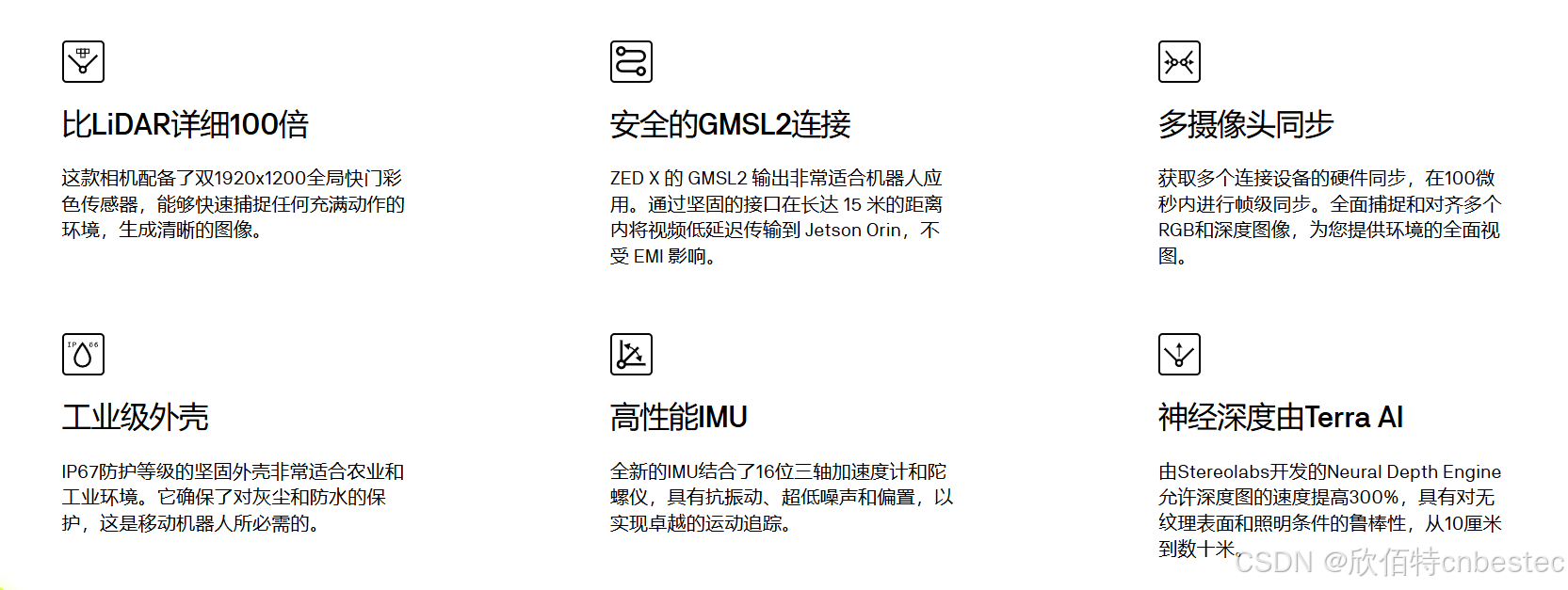
ZED X与ZED X Mini均具备 IP67 防护等级,全铝机身可抵御粉尘侵入与短时浸水,-20°C 至 + 55°C 的宽温设计,适配农田、工厂车间等多尘、潮湿或温差较大的环境。

内置高性能 IMU(16 位三轴加速度计 + 陀螺仪),振动环境下仍能保持稳定的运动跟踪精度,为机器人在颠簸路面(如农机作业)或高频振动场景(如工厂生产线)提供可靠的姿态数据。
二、多型号适配,覆盖全场景需求

1. ZED X:中长距作业主力
- 核心参数:
- 基线 163.4×31.8×36.7mm(物理尺寸对应基线设计 ),支持 2.2mm/4mm 双焦距;
- 2.2mm 镜头:深度量程 0.3 - 20m,视场角 110°(H)×80°(V)×120°(D)
- 4mm 镜头:深度量程 1.0 - 35m,视场角 72°(H)×44°(V)×81°(D) ;
- 适配场景:农业机械导航(4mm 镜头长距探测田埂 )、大型仓储 AGV 避障(2.2mm 广角覆盖多货架 ),需兼顾 “广域监测 + 中长距精准识别” 的场景。
2. ZED X Mini:紧凑短距专家
- 核心参数:
- 基线 93.6×31.8×36.7mm(紧凑机身设计),支持 2.2mm/4mm 双焦距;
- 2.2mm 镜头:深度量程 0.1 - 8m,视场角 80°(H)×52°(V)×91°(D) ;
- 4mm 镜头:深度量程 0.15 - 12m,视场角 60°(H)×48°(V)×70°(D) ;
- 适配场景:机械臂抓取(2.2mm 镜头 0.1m 近距识别零件 )、小型物流机器人(4mm 镜头穿梭货架间 ),聚焦 “狭小空间 + 短距高频作业”。
3. ZED X One:灵活单目方案
- 核心参数:
- 单目设计,分 GS版(2.2mm/4mm镜头)与 4K 版(3.05mm/4mm镜头);
- GS版 2.2mm 镜头:深度量程 0.1 - 20m,视场角110°(H)×79.6°(V)×120.8°(D);
- GS版 4mm 镜头:深度量程 0.1 - 35m,视场角80°(H)×52°(V)×91°(D);
- 4K版 3.05mm 镜头:深度量程 0.15 – 35m,视场角109.9°(H)×71.8°(V)×118.8°(D);
- 4K版 4mm 镜头:深度量程 0.15 – 35m,视场角80°(H)×52°(V)×91°(D);
- 适配场景:多相机环绕视觉(工厂 360° 环境建模 )、夜间建筑监测(4K 版弱光识别裂缝 ),满足 “特种场景 + 定制化视觉” 需求。
三、技术亮点,强化感知能力
1. 精准深度与 3D 感知
9 组全玻璃镜片配合光学校正畸变技术,减少图像畸变;通过立体视觉算法生成稳定的深度数据与 3D 点云,为机器人路径规划、障碍物检测提供精准空间信息。
ZED双目3D相机-精准的深度与3D感知
2. 高效连接与协同
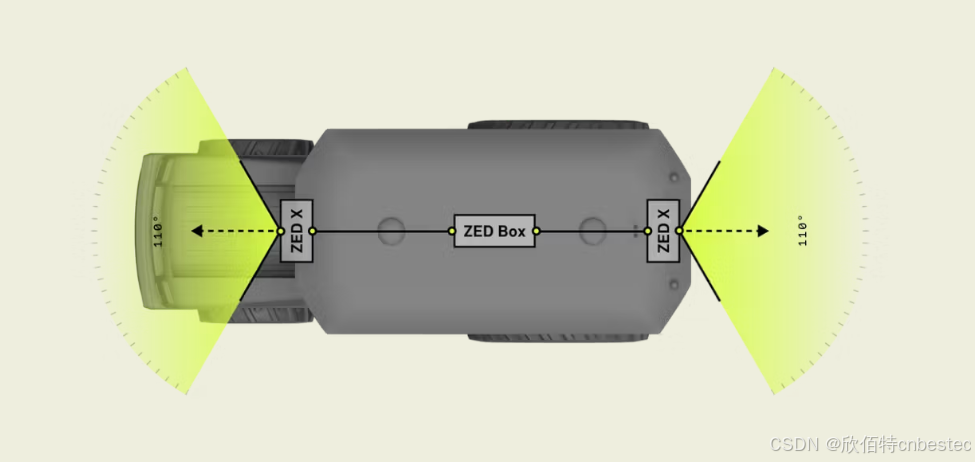
使用硬件同步在Jetson AGX Orin上连接最多4个ZED X相机,通过ZED SDK,将多个相机的点云和里程计融合成一个数据源,确保 RGB 与深度图像帧级对齐,满足 360° 环境重构需求。
四、选型指南:匹配场景需求
| 应用场景 | 推荐型号 | 核心依据 |
| 中长距探测(1-35m) | ZED X(4mm 镜头) | 35m 最大深度,110° 视场覆盖广域场景 |
| 短距高精度(0.1-12m) | ZED X Mini | 5cm 基线 + 双焦距,适配机械臂、小型 AGV |
| 弱光 / 多机协同 | ZED X One(4K 版) | 85dB 动态范围,≤100 微秒同步精度 |
ZED X系列相机凭借工业级可靠性、多场景适配性与精准的感知能力,成为ZED 双目3D相机技术的升级代表作。无论是农业自动化、工业物流还是特种机器人领域,均能提供稳定的3D视觉支持。
从农田里的智能农机精准导航,到工厂中机械臂的毫米级抓取,再到特种机器人在极端环境下的稳健作业,ZED相机正以 “感知进化” 推动着自动化世界的边界不断拓展,让每一台智能设备都拥有更敏锐的 “视觉神经”,为万物互联的智能时代注入更坚实的技术动能。
