论文阅读:Agricultural machinery automatic navigation technology
地址:Agricultural machinery automatic navigation technology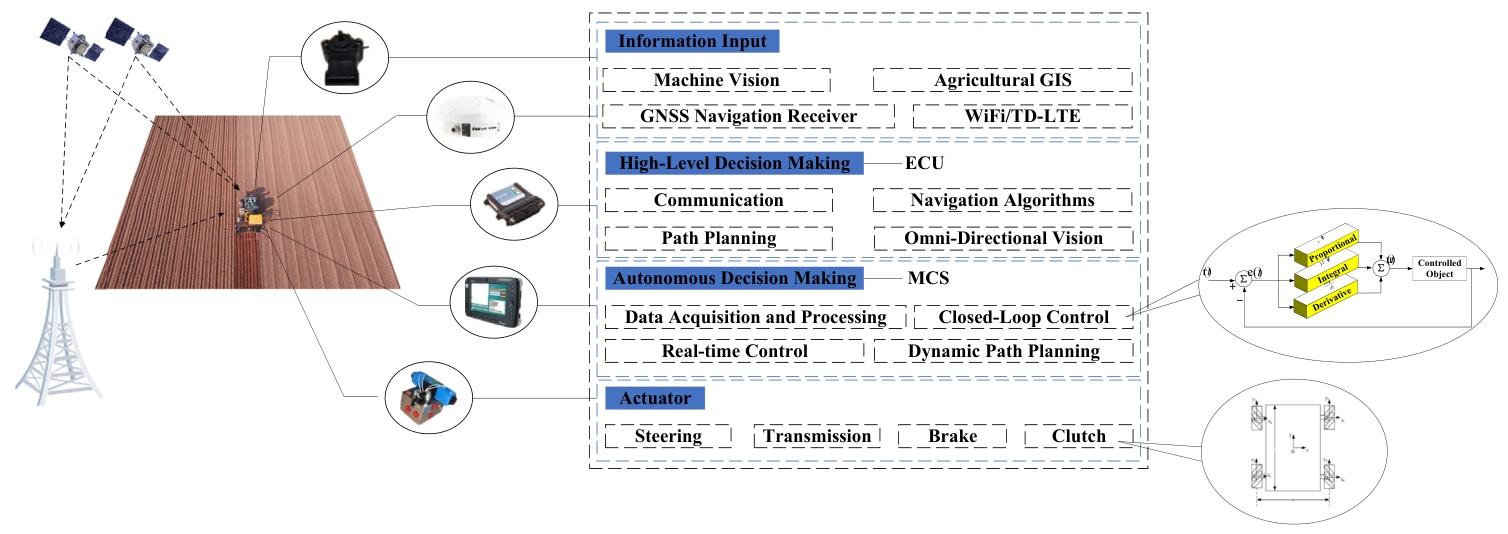
摘要
本文回顾、比较并分析了以往关于农业机械自动导航与路径规划技术的研究。首先,介绍了农业机械自动驾驶的基本组成部分,包括自动导航、路径规划、控制系统和通信模块。通常,自动导航技术可分为三类:全球导航卫星系统(GNSS)、机器视觉和激光雷达。本文总结并对比了不同方法的结构、优缺点及当前研究的技术难点。目前,较成功的方式是将 GNSS 与机器视觉结合,为农业机械避障和生成最优路径提供保障。随后,阐述了路径规划方法,包括基于图搜索、采样、优化和学习的四类路径规划算法,并根据不同应用场景提出了 22 种可用算法,总结了当前研究中尚未完全解决的挑战与难点。最后,针对这些研究中出现的问题提出了进一步研究的建议。
论文概述
智能农业是农业发展的重要方向,而农业机械的信息化与智能化是实现智能农业的基础。当前农村劳动力短缺、成本上升,传统农业生产模式难以满足需求,农业机械自动驾驶技术可降低劳动强度、提高效率,成为解决上述问题的关键。
研究内容主要包括三部分:
- 农业机械自动驾驶系统组成:涵盖自动导航、路径规划、控制系统和通信模块。其中,自动导航是核心,依赖机器视觉、激光雷达和 GNSS 实现环境感知;路径规划是避障与最优路径生成的关键,分为全局与局部规划;控制系统负责执行导航指令,通信模块通过蓝牙、LoRa 等技术实现数据交互。
- 自动导航技术:重点分析了 GNSS、机器视觉和激光雷达三类技术。GNSS 基于卫星定位,差分定位精度较高但易受信号遮挡影响;机器视觉通过图像分析感知环境,成本低但受光照、复杂路况影响大;激光雷达测距精度高但成本高,且在复杂农村道路场景中存在识别动态障碍的局限性。
- 路径规划算法:归纳了四类方法:基于图搜索(如 Dijkstra、A * 算法)、基于采样(如 PRM、RRT 算法)、基于优化(如 CHOMP、STOMP 算法)和基于学习(如深度学习、强化学习),并总结了 22 种具体算法的适用场景与技术难点。
一、相关技术方法综述总结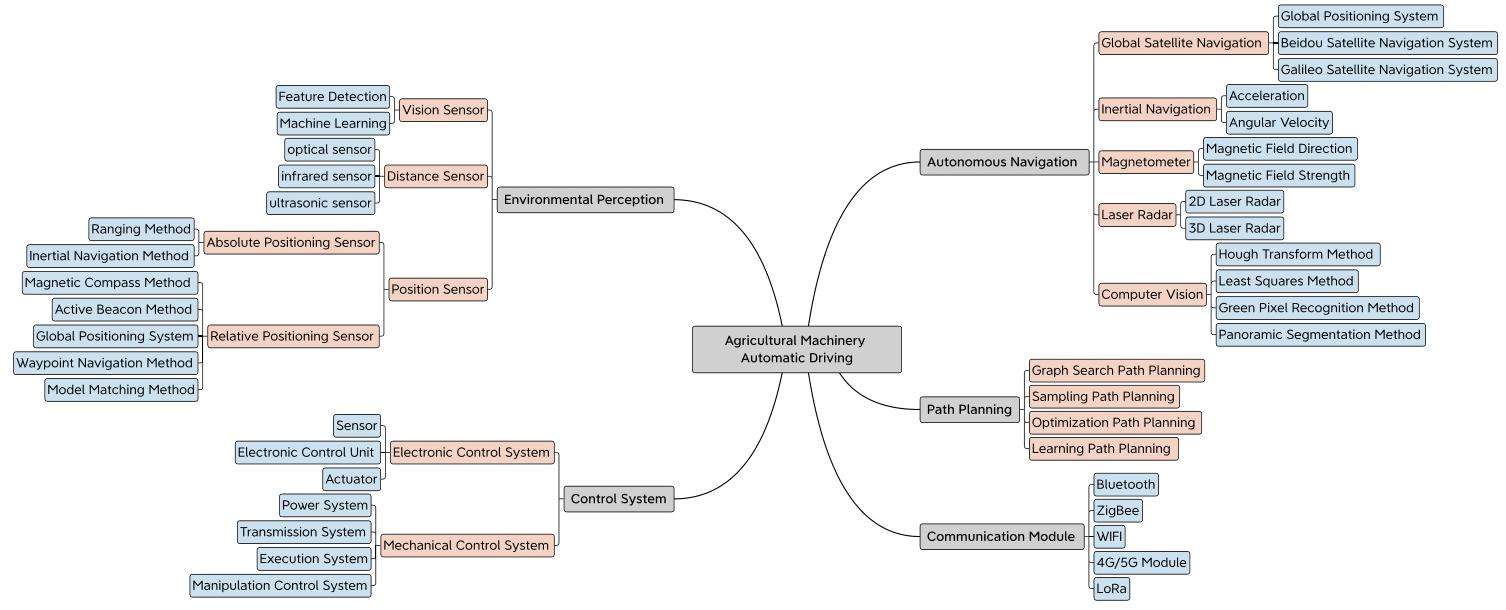
一、自动导航技术
| 技术类型 | 原理 | 优点 | 缺点 | 性能表现(误差范围) | 评价指标 | 数据集特点 |
|---|---|---|---|---|---|---|
| GNSS 技术 | 通过卫星定位(单点 / 差分定位)获取绝对位置 | 定位精度高(厘米级),适用于开阔农田 | 信号易受遮挡(树木、建筑),受大气影响产生误差;无法感知作物行弯曲、倒伏等地面动态因素 | - CD-GPS 直线行驶误差<2.5cm; - DGPS 直线行驶误差<1cm; - RTK-GNSS 在复杂环境(水田)最大偏差 17.5cm | RMSE(均方根误差)、平均偏差 | 以实地测试数据为主(如甘蔗田、稻田、果园),依赖卫星信号与地面环境匹配 |
| 机器视觉技术 | 基于图像采集与分析(特征提取 / 机器学习)感知环境 | 成本低、信息丰富(颜色、纹理),灵活性高 | 受光照、天气、复杂路况(泥泞、杂草)影响大;动态障碍( livestock、拖拉机)识别难度高 | - 直线行驶平均横向误差 0.018m; - 曲线最大偏差 0.161m; - 改进算法(如 UNet+ACBlock)准确率 85.03% | 偏差率、语义分割准确率、图像处理速度 | 需手动标注农村道路图像(含水泥、沙地、杂草等场景),数据标注成本高且依赖人工质量 |
| 激光雷达技术 | 发射激光信号,通过反射时间差计算距离,实现 3D 环境重建与避障 | 测距远、精度高、抗干扰强,适用于障碍检测 | 2D 雷达缺乏垂直信息;3D 雷达成本高、分辨率低于 RGB 相机;复杂农村道路动态障碍识别不足 | - 窄通道避障最小距离 1.8m; - 果园导航误差控制在 0.15m; - 紧急避障范围 0.5m | 避障响应距离、导航误差、点云重建精度 | 以实地点云数据为主(如果园、温室),需融合多源信息(如毫米波雷达)提升鲁棒性 |
-
GNSS 技术
- 原理:通过多颗卫星实现定位,分为单点定位和差分定位(精度更高,常用差分 GPS、RTK-GPS 等)。
- 优点:定位精度高(厘米级),适用于开阔农田场景。
- 缺点:信号易受树木、建筑遮挡,受电离层、 troposphere 影响产生误差,无法感知作物行弯曲、倒伏等地面动态因素。
- 技术难点:复杂农村道路路径规划困难;信号遮挡导致信息丢失;难以应对地面环境变量。
-
机器视觉技术
- 原理:基于成像设备采集图像,通过特征提取(如颜色、纹理)或机器学习算法(如霍夫变换、全卷积神经网络)感知环境。
- 优点:信息丰富、成本低、灵活性高,适用于作物行识别、道路分割等场景。
- 缺点:受光照、天气、复杂路况(如泥泞、杂草覆盖)影响大;动态障碍(如 livestock、拖拉机)识别难度高;依赖大量标注数据,模型泛化能力有限。
- 技术难点:复杂路况下特征提取稳定性差;动态障碍识别精度不足;数据标注成本高且质量影响模型性能。
-
激光雷达技术
- 原理:通过发射激光信号并接收反射信号计算距离,分为 2D 和 3D 类型,用于测距与避障。
- 优点:测距远、精度高、抗干扰能力强,适用于 3D 环境重建和障碍检测。
- 缺点:2D 雷达缺乏垂直信息,3D 雷达成本高且分辨率低于 RGB 相机;在恶劣天气或复杂地形中实时路径调整难度大。
- 技术难点:农村道路动态障碍多,识别难度高;3D 设备成本高;恶劣环境下实时避障能力不足。
二、路径规划算法
| 算法类型 | 原理 | 优点 | 缺点 | 性能表现 | 评价指标 | 适用场景 |
|---|---|---|---|---|---|---|
| 基于图搜索 | 将路网转化为图结构,搜索最短路径(如 Dijkstra、A*) | 可找到全局最优解,适用于静态环境 | 大规模地图搜索效率低;难以处理动态环境与机械运动学约束(如最大转向半径) | - A算法在枣园 U 型路径平均误差 0.0269m; - Hybrid A规划周期 50-300ms | 路径长度、搜索时间、导航误差 | 结构化道路、静态障碍场景(如农田直线作业) |
| 基于采样 | 随机采样生成候选路径,筛选最优解(如 PRM、RRT) | 无需显式构建配置空间,适用于高维 / 复杂环境 | 采样存在盲目性 / 不均匀性,路径平滑性差;动态环境多目标规划效果有限 | - RRT-Connect 算法在窄通道环境适应性强; - Informed RRT 加速单源避障路径生成 | 采样效率、路径平滑度、避障成功率 | 非结构化环境(如温室、丘陵) |
| 基于优化 | 将路径规划转化为优化问题,最小化成本函数(如 CHOMP、TEB) | 可处理多约束(速度、曲率),保证路径连续性 | 高维空间易陷入局部最优;计算时间长,受环境噪声影响大 | - CHOMP 算法可快速收敛至无碰撞轨迹; - TEB 算法动态障碍避障效果好 | 轨迹平滑性、计算效率、约束满足度 | 动态障碍场景(如农田作业车避障) |
| 基于学习 | 通过深度学习(CNN/RNN)或强化学习从数据中学习路径策略 | 精度高,适用于动态场景;可融合感知与决策能力(如 DRL) | 需海量标注数据;计算量大,依赖高算力设备;泛化能力待提升 | - 深度学习路径搜索成功率 90%; - 强化学习(R-SAC)实现动态 / 静态障碍安全避障 | 路径规划准确率、模型泛化能力、训练效率 | 复杂动态环境(如农村道路多障碍场景) |
-
基于图搜索的算法
- 原理:将路网转化为图结构,搜索起点到终点的最短路径,包括 Dijkstra、A*、Hybrid A*、JPS、D * 等算法。
- 优点:可找到全局最优解,适用于静态环境。
- 缺点:地图过大时搜索效率低;难以处理动态环境和机械运动学约束(如最大转向半径)。
-
基于采样的算法
- 原理:通过随机采样生成候选路径,筛选最优解,包括 PRM、RRT、Kinodynamic RRT*、Informed RRT 等算法。
- 优点:无需显式构建配置空间,适用于高维、复杂环境。
- 缺点:采样存在盲目性或不均匀性,路径平滑性差;动态环境中多目标规划效果有限。
-
基于优化的算法
- 原理:将路径规划转化为优化问题,通过最小化成本函数求解,包括 CHOMP、STOMP、TEB、CES 等算法。
- 优点:可处理多约束(如速度、曲率),保证路径连续性。
- 缺点:高维空间中易陷入局部最优,计算时间长,受环境噪声影响大。
-
基于学习的算法
- 原理:通过深度学习(如卷积神经网络)或强化学习(如 SAC 算法)从数据中学习路径策略,包括 DRL(深度强化学习)等融合方法。
- 优点:可实现高精度路径规划,适用于动态场景。
- 缺点:依赖海量高质量数据,计算量大,模型泛化能力和抗过拟合能力需提升。
二、研究热点
1. 多传感器融合技术
农业机械在复杂农田环境中需同时应对卫星信号遮挡(如果园树冠)、动态障碍物(如牲畜、其他作业机械)和地形变化(如泥泞、陡坡)。研究热点集中于通过 GNSS、机器视觉、激光雷达、毫米波雷达等多传感器融合提升环境感知鲁棒性。例如,Xue 等设计的自适应记忆模块通过时空注意力机制缓解视觉里程计的累积误差,Yin 等开发的 3D 相机障碍物规避系统在动态条件下实现 7.1 cm 的定位精度。此外,融合 GNSS 与视觉定位技术可解决单一传感器的局限性,如视觉定位在卫星信号缺失时仍能实现厘米级导航。
2. 深度学习与强化学习的应用
深度学习模型(如 YOLOv8、UNet)被广泛用于障碍物检测、作物行识别和语义分割。例如,基于 YOLOv8 的避障系统可实时识别树木、沟渠等障碍物,并通过强化学习(如 R-SAC 算法)优化路径决策。此外,江苏大学研发的多臂高速猕猴桃采摘机器人和作物病害检测芯片,展示了 AI 在精准作业中的深度融合。动态环境下的实时决策(如紧急避障)成为算法优化的核心方向,例如改进 A * 算法结合 LM-BZS 算法显著降低路径曲率并提升规划效率。
3. 动态障碍物识别与实时避障
针对农田中的动态障碍物(如移动农机、野生动物),研究聚焦于提升检测精度和响应速度。例如,基于 3D 相机的障碍物规避系统通过噪声滤波和背景去除技术,在动态条件下实现 7.1 cm 的定位误差。此外,结合光流引导特征和循环神经网络(RNN)的方法可有效处理视频中的运动模糊问题,提升复杂场景下的检测稳定性。
4. 低成本解决方案与模块化升级
为推动技术规模化应用,低成本传感器(如双目相机替代激光雷达)和农机套件技术成为热点。例如,约翰迪尔通过模块化升级套件(如 See and Spray 喷雾系统)实现旧设备智能化改造,化学喷雾量减少 77%。国内企业研发的 “单产提升套件” 和 “排种电驱升级模块”,以低成本实现播种精度提升,适配中小农户需求。
5. 复杂环境下的精准定位与路径规划
在丘陵、果园等非结构化环境中,研究重点包括:
- 抗干扰定位技术:如融合视觉 SLAM 与差分 GNSS,解决卫星信号遮挡问题;
- 路径平滑与曲率优化:改进 A * 算法结合贝塞尔曲线拼接(LM-BZS),降低路径曲率并提升作业稳定性;
- 多约束优化:如基于 CHOMP 算法的路径规划,同时满足速度、曲率和避障约束。
三、难点
1. 复杂环境下的动态障碍物识别精度不足
- 挑战:光照变化、杂草覆盖、动态目标(如移动机械)导致特征提取不稳定,现有算法在复杂场景下误检率高;
- 解决方案:开发跨模态特征融合模型(如结合光流与语义分割),并引入小样本学习提升模型泛化能力。
2. 实时性与计算资源的矛盾
- 挑战:深度学习模型计算量大,边缘设备(如农机嵌入式系统)难以满足实时性要求;
- 解决方案:设计轻量化网络架构(如 YOLOv8-Tiny),结合模型压缩与硬件加速(如 GPU/TPU)优化推理速度。
3. 核心技术与高端装备依赖进口
- 挑战:国内农机在高精度传感器、CVT 变速箱等核心部件上仍依赖进口,高端市场被约翰迪尔、凯斯等企业垄断;
- 解决方案:加大基础研究投入,推动产学研合作,例如江苏大学与沃得农机合作开发联合收获机自适应控制系统。
4. 标准化数据集与开源工具缺失
- 挑战:现有数据集多为研究者自建,缺乏统一标注标准,且公开数据集(如 Agriculture-Vision)覆盖场景有限;
- 解决方案:建立跨机构协作的数据集共享平台,鼓励开源社区贡献,例如农业机器人避障数据集(AgriObstacle)。
5. 农机农艺融合不足
- 挑战:现有技术未充分考虑作物生长特性(如行距、株高),导致作业质量(如播种均匀性)不达标;
- 解决方案:结合农学专家知识,开发农机 - 农艺协同优化模型,例如根据土壤墒情动态调整播种深度。
6. 复杂环境下的定位精度与可靠性
- 挑战:果园、温室等半封闭环境中,GNSS 信号易受遮挡,视觉 SLAM 存在累积误差;
- 解决方案:融合超宽带(UWB)定位与惯性导航(INS),构建多源融合定位系统,提升抗干扰能力。
7. 中小农户的技术采纳障碍
- 挑战:高端农机成本高昂,且农户缺乏操作培训,导致技术渗透率低;
- 解决方案:推广低成本套件升级方案(如单产提升模块),并通过政府补贴与培训计划降低应用门槛。
8. 动态路径规划的安全性验证
- 挑战:现有算法在紧急避障时可能引发侧翻或碰撞,缺乏系统性的安全评估体系;
- 解决方案:建立基于数字孪生的仿真测试平台,模拟极端场景(如陡坡打滑)验证算法鲁棒性。
9. 多机协作的通信与协调机制
- 挑战:多台农机协同作业时,通信延迟与路径冲突可能导致效率下降或事故;
- 解决方案:设计分布式多智能体强化学习框架,实现动态任务分配与无碰撞路径规划。
10. 政策支持与产业生态不完善
-
挑战:农机购置补贴政策覆盖面不足,且产业链上下游协同薄弱,影响技术推广;
-
解决方案:优化补贴政策向智能农机倾斜,推动企业 - 高校 - 农户的产业联盟建设,例如江苏大学与莱因智能的成果转让协议。
四、未来研究方向
1. 多模态传感器融合架构设计
- 视觉 + 激光雷达融合:利用视觉的纹理信息与激光雷达的三维结构数据,提升障碍物检测精度;
- 动态补偿机制:如 Xue 等提出的时空注意力模块,缓解视觉里程计的累积误差;
- 边缘计算集成:在农机端部署轻量级模型,实现实时数据处理与决策。
2. 高效路径规划算法优化
- 混合算法框架:如改进 A * 算法结合强化学习,平衡搜索效率与路径质量;
- 动态环境适应性:开发在线重规划算法,处理突发障碍物(如作业机械横穿);
- 农机运动学约束融合:将最大转向半径、滑移率等参数嵌入路径生成模型,提升作业安全性。
3. 复杂环境下的自主导航系统
- 果园 / 丘陵场景适配:针对树冠遮挡、地形起伏,开发基于多传感器的局部地图重建与动态路径调整技术;
- 多机协作机制:研究多台农机的协同作业路径规划,避免冲突并提升效率;
- 人机共融交互:设计人机协作界面,支持农户远程监控与紧急干预。
4. 核心技术国产化与产业链整合
- 高端传感器研发:突破 3D 激光雷达、高精度 IMU 等核心部件的技术壁垒,降低对进口依赖;
- 农机套件生态构建:推动模块化升级技术(如智能喷药套件、谷物监测套件)的标准化与规模化应用;
- 产学研协同创新:如江苏大学与企业合作推动成果转化,促进技术从实验室到田间的落地。
5. 标准化数据集与评价体系建设
- 多场景数据集:构建包含农田、果园、丘陵等环境的多模态数据集(如点云、图像、定位数据),支持模型泛化能力评估;
- 实时性与鲁棒性指标:建立统一的避障响应时间、导航误差、能耗效率等评价标准,推动技术迭代。