【工控】线扫相机小结 第六篇
背景
这次使用一张采集卡,带两个线扫相机。而且这次产品比较大,长度大概在300mm左右。两个相机轮流采集。相机设置图片高度是:31260。
然后采集的时候就报错了!!!!提示“缓存已满”
原因分析
采集卡的缓存一共就2个G,而我的图片比较大,而且又是一张卡带两个相机,所以直接把卡的缓存给撑爆了,之前我还以为线扫相机可以扫很长很长的产品,看来瓶颈在这里了。
解决方案
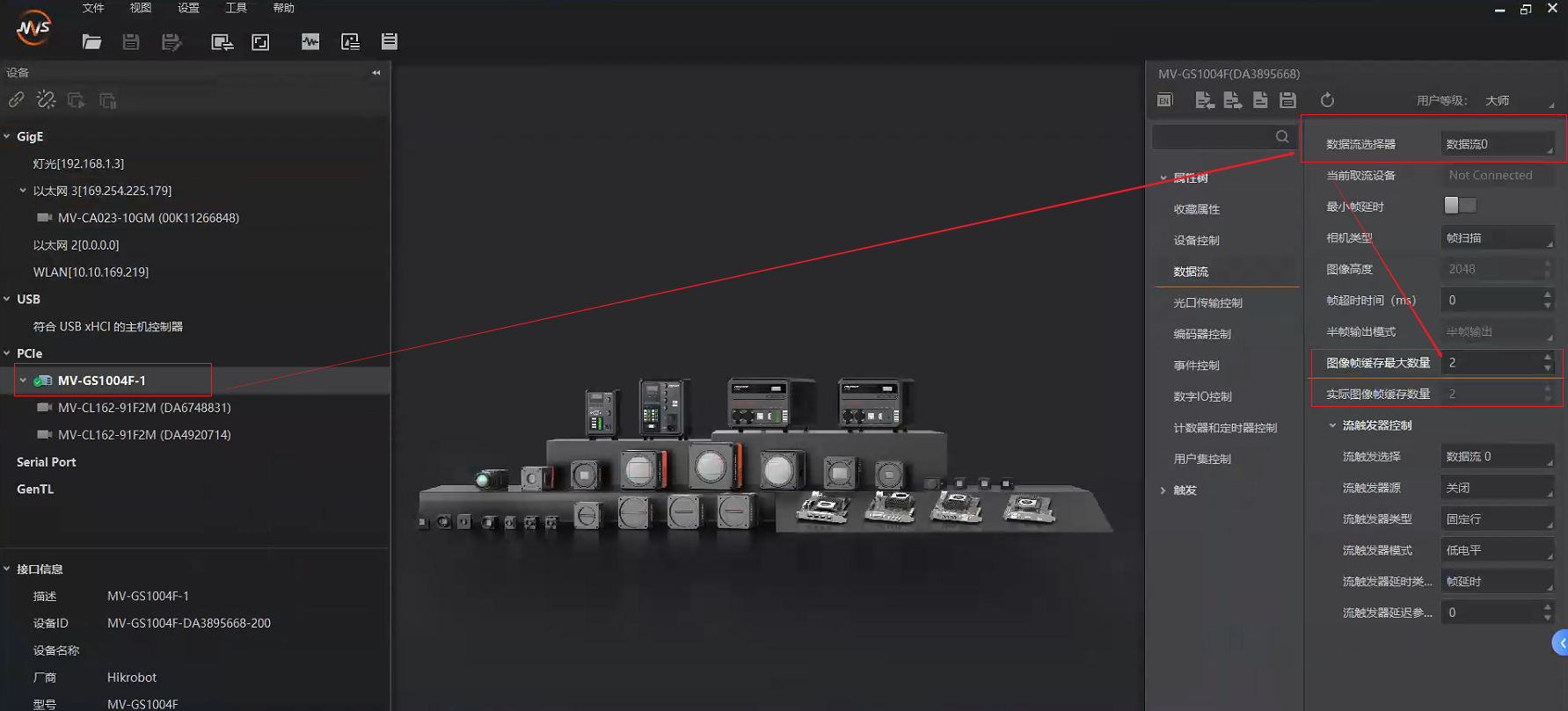
之前我们也说过,卡和相机的配置是分开的,这次我们需要修改卡的配置!
首先连接卡,然后需要断开相机(断开可才能设置,不然是灰色的),最后如图找到图像帧缓存最大数量将其设置为2.。如果比2大,我这里就不行了!
这里,我有两个相机,所以需要切换数据流选择器将两个相机的图像帧缓存最大数量都设置为2才行。这样就刚刚好了,不会报错缓存不够的错误了。
但是这里还有一个坑,如果你设置成1,也会报错。我询问了海康的那边的技术才得知,这个值最小是2,如果你设置成1,他的程序会自动把这个值设置为3。额,好吧。。。

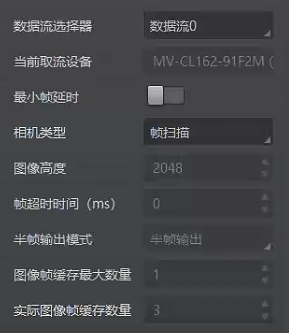
如图所示,如果设置成1,采集后,模式实际缓存数量变成3了。