工业相机选择规则
一、相机分辨率选择
相机分辨率指的是相机传感器捕捉图像细节的能力,具体来说就是传感器上有效像素的总数量。可以把它理解为构成数字图像的“小方块”(像素)有多少个。
工业领域内相机的分辨率的选择根据更具产品需要的精度要求和产品大小来确定。
相机常见的几种分辨率如下:
640×480=307200=30w
1280×1024=1310720=130w
2448×2048=5013504=500w
例如:产品要求精度为0.1mm,产品的大小为100mm*60mm,那么我们所需要的相机的最低分辨率为:1000*600=600000。所需要的最低分辨率为60w。那我们相机选择就选择1280*1024=1310720=130w像素。
公式即为:最低分辨率=
二、相机快门的选择
卷帘快门(Rolling Shutter)与全局快门(Global Shutter)是两种不同的图像传感器数据读取方式,它们直接影响相机在拍摄动态场景时的成像效果。

全局相机在动态运行的情况下图像不会产生形变,一般在不考虑成本的情况下我们优选全局相机。卷帘快门则可能导致图像扭曲,适用于静态或低速场景。选择时需根据实际应用需求权衡成本与成像质量,确保拍摄效果符合预期要求。
三、相机色彩的选择
在工业应用上,不涉及到色彩检测的项目上,能用黑白的相机不用彩色的相机。
黑白相机优点如下:
1.黑白相机传输的数据更小,传输的速度也更快更稳定。
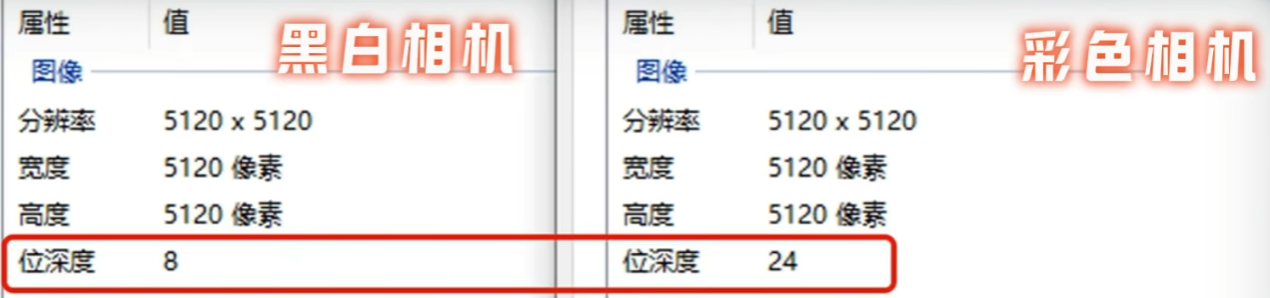
2.图像解析度好
