练习uart和摄像头内核驱动开发测试
利用Linux内核驱动开发,目前仅完成串口测试和摄像头测试
1、串口:以内核自带的串口驱动为基础,编写测试程序
uart.h
#ifndef __UART_H__
#define __UART_H__#include <termios.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <errno.h>
#include <sys/types.h>// 打开串口设备并配置为115200波特率、8位数据位、无校验、1位停止位
int open_serial_port(const char *port);// 写入数据到串口
int write_to_serial(int fd, const char *data, size_t length);// 从串口读取数据
int read_from_serial(int fd, char *buffer, size_t buffer_size);// 关闭串口设备
void close_serial_port(int fd);#endif // TERMIOS_H
uart.c
#include "uart.h"
int open_serial_port(const char *port) {// 打开串口设备(阻塞模式)int fd = open(port, O_RDWR | O_NOCTTY);if (fd == -1) {perror("Error opening serial port");return -1;}// 获取当前串口配置struct termios options;if (tcgetattr(fd, &options) != 0) {perror("tcgetattr failed");close(fd);return -1;}// 设置波特率为115200cfsetispeed(&options, B115200);cfsetospeed(&options, B115200);// 配置数据位、停止位和校验位options.c_cflag &= ~CSIZE; // 清除数据位掩码options.c_cflag |= CS8; // 8位数据位options.c_cflag &= ~PARENB; // 无校验位options.c_cflag &= ~CSTOPB; // 1位停止位// 启用接收和本地模式options.c_cflag |= (CLOCAL | CREAD);// 设置原始输入模式(非规范模式)options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG);// 禁用特殊输出处理options.c_oflag &= ~OPOST;// 设置超时:立即返回(VMIN=0, VTIME=0)//options.c_cc[VMIN] = 0;//options.c_cc[VTIME] = 0;// 修改 c_cc 配置,启用阻塞读options.c_cc[VMIN] = 1; // 至少读取1个字符才返回options.c_cc[VTIME] = 10; // 等待超时:1秒(10 * 0.1秒)// 应用配置if (tcsetattr(fd, TCSANOW, &options) != 0) {perror("tcsetattr failed");close(fd);return -1;}// 清空缓冲区tcflush(fd, TCIOFLUSH);return fd;
}int write_to_serial(int fd, const char *data, size_t length) {ssize_t bytes_written = write(fd, data, length);if (bytes_written < 0) {perror("Error writing to serial port");}return bytes_written;
}int read_from_serial(int fd, char *buffer, size_t buffer_size) {ssize_t bytes_read = read(fd, buffer, buffer_size - 1);if (bytes_read < 0) {perror("Error reading from serial port");return -1;}buffer[bytes_read] = '\0'; // 添加字符串结束符return bytes_read;
}void close_serial_port(int fd) {if (fd >= 0) {close(fd);}
}
main.c
#include "uart.h"int main(void)
{int uartfd = 0;int nret = 0;char tmpbuff[4096] = {0};uartfd = open_serial_port("/dev/ttymxc2");if (-1 == uartfd){printf("open_serial_port failed\n");return -1;}while (1){ write_to_serial(uartfd, "hello world", 11);memset(tmpbuff, 0, sizeof(tmpbuff));nret = read_from_serial(uartfd, tmpbuff, sizeof(tmpbuff));printf("nret = %d, tmpbuff = %s\n", nret, tmpbuff);sleep(1);}close_serial_port(uartfd);return 0;
}
2、摄像头ov5640测试
一、修改设备树
1、 在i2c2下添加ov5640信息
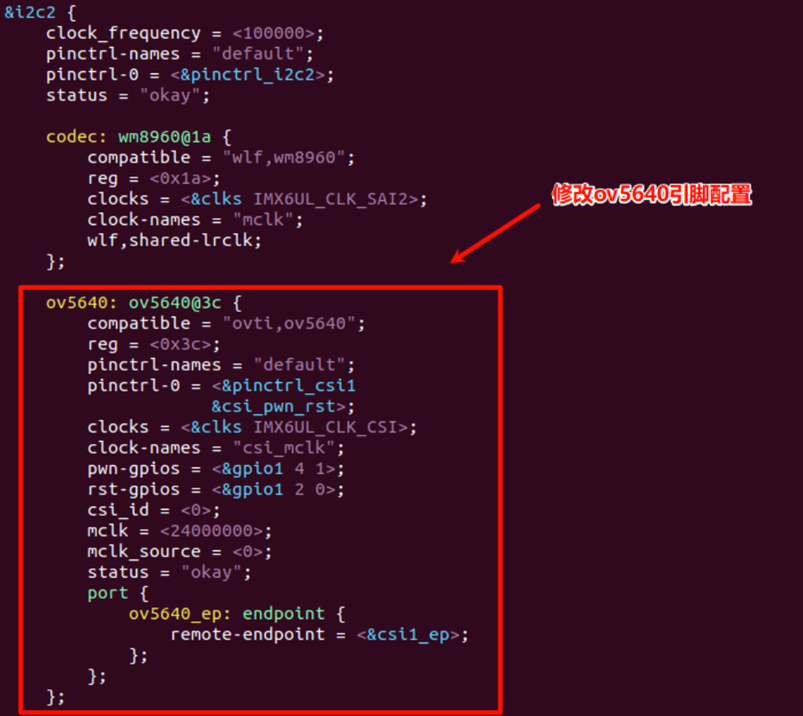
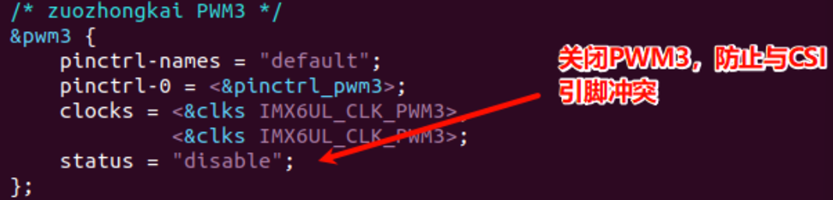
2、 设置pinctrl子系统中的摄像头复位引脚

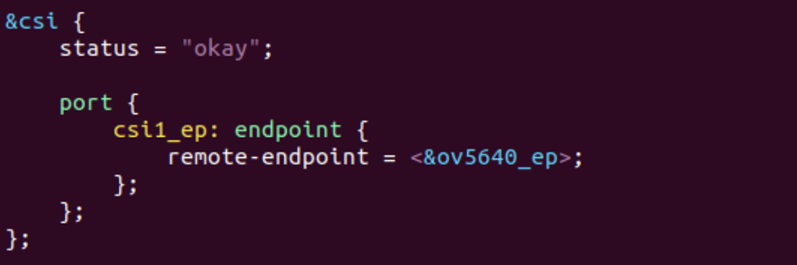
3、 开启CSI接口配置
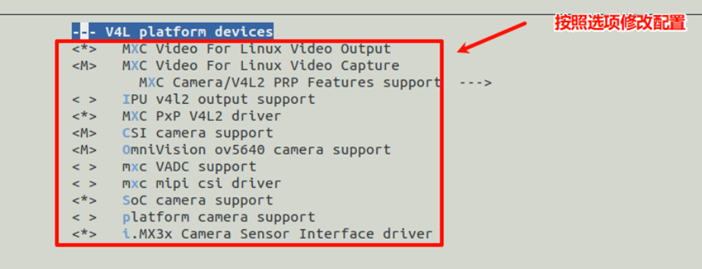
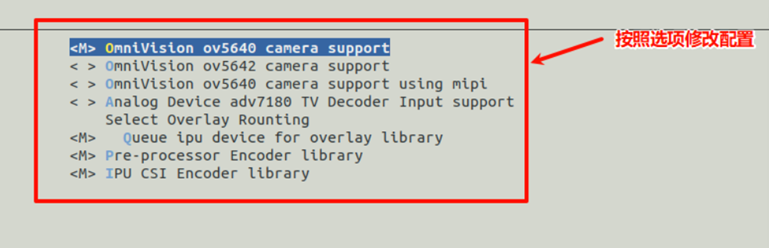
二、修改内核加入ov5640相关驱动模块:
1、通过图形界面修改
2. 重新编译内核、设备树、驱动模块
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- zImage
make dtbs
make modules
3. 将设备树和内核镜像拷贝到tftp管理目录下
cp arch/arm/boot/dts/imx6ull-alientek-emmc.dtb ~/tftpboot
cp arch/arm/boot/zImage ~/tftpboot
4. 将所有的内核驱动模块安装到文件系统下
make INSTALL_MOD_PATH=/home/linux/nfs/rootfs modules_install
5. 重新启动开发板,并插上ov5640摄像头
6. 在开发板端加载摄像头内核驱动模块
cd /lib/modules/4.1.15 depmod -a
modprobe mx6s_capture.ko modprobe ov5640_camera.ko
7. 查看是否生成摄像头设备节点
ls /dev/video1。
三、编写测试文件测试摄像头功能