机器视觉的智能手表贴合应用
在智能手表的世界里,精密的屏幕与内部元件的贴合,堪比一场“毫米级”的精密舞蹈。传统依靠人眼与机械夹具的定位方式,就像在昏暗光线下穿针引线,稍有不慎便可能造成贴合偏移、气泡甚至昂贵的核心部件报废。当智能手表愈发轻薄、屏幕边框愈发纤细,甚至追求无边框的极致美学时,制造环节的精度要求早已突破了人眼辨识的极限。

这时,就该MasterAlign视觉系统登场了,它如同一位不知疲倦、视力超群的工业显微镜,重新定义了精密贴合的可能。视觉对位是其核心能力之一,它搭载的高分辨率相机如同敏锐的“眼睛”,能瞬间捕捉屏幕上预设的微小特征点,同时也能精确定位相应靶标。
这个过程超越了简单的图像捕捉,系统内置的智能算法如同一个经验丰富的“大脑”,能高速计算两者在X、Y轴平面位置以及旋转角度的细微偏差。在毫秒间计算出精确的补偿值,并将指令实时发送给高精度的运动平台。这种微米级的定位能力,确保了元件与屏幕在贴合前就已处于理论上的“完美契合”位置。

但视觉对位只是这场精密舞蹈的前奏,真正的考验在于视觉贴合的执行。在元件与屏幕相互靠近、接触直至最终压合的过程中,任何微小的振动、材料的弹性形变或气压的波动都可能破坏之前的精密定位。
通过实时监测贴合过程中的关键区域,系统能即时判断是否发生错位或产生气泡。一旦发现偏差超出预设的安全阈值,它能立即发出警报甚至自动暂停流程,将潜在的不良品拦截在产线之上。这种“眼见为实”的闭环控制,让贴合过程从“盲操作”变成了“透明可控”,大幅提升了良品率,也守护了产品的可靠品质。

机器视觉的力量若被复杂的操作界面所束缚,其价值必将大打折扣。因此,视觉界面操作便捷成为了技术落地的关键一环。现代先进的视觉系统早已摒弃了晦涩难懂的代码编程。MasterAlign的软件界面设计直观,工程师无需深厚的编程背景也能快速上手。
其核心逻辑是“所见即所得”,用户通过图形化界面轻松设定检测区域、调整检测参数。设置好的视觉定位与贴合流程可以保存为配方,切换不同型号手表生产时,一键调用即可,省去了大量重复调试的时间。繁琐的校准过程也被极大简化,友好的向导指引用户一步步完成,大大降低了应用门槛。
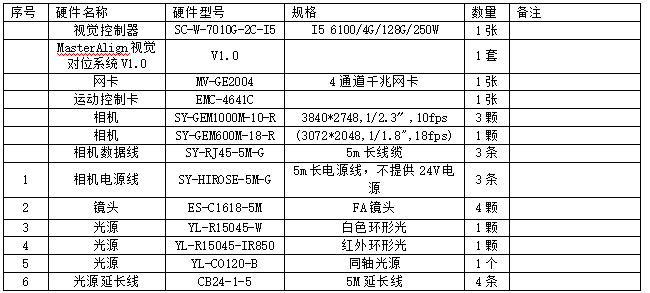
配置清单如下:
在智能手表这类追求极致精密与美感的产品制造领域,机器视觉已从锦上添花的“加分项”演变为不可或缺的“核心装备”。通过MasterAlign视觉系统所展现的视觉对位的精准、“视觉贴合”的可靠守护以及“视觉界面操作便捷”的友好交互,它成功解决了传统制造中的痛点,大幅提升了生产效率和产品良率。
作为这套系统的开发者,深圳市双翌光电科技有限公司已在机器视觉领域深耕十年。不仅提供标准化的视觉系统,更擅长为客户定制"视觉+运动控制"一体化解决方案。从消费电子到新能源,从半导体到医药领域,双翌光电的视觉解决方案正在20多个行业持续创造价值。