OpenCV校准双目相机并测量距离
0、简介
利用OpenCV 自带的双目立体校准程序,对相机求取内参、外参后。校准图像,在利用OpenCV 再带的SGB算法,求取视差图。实现框选画面中任意位置,计算该位置距离相机的距离。
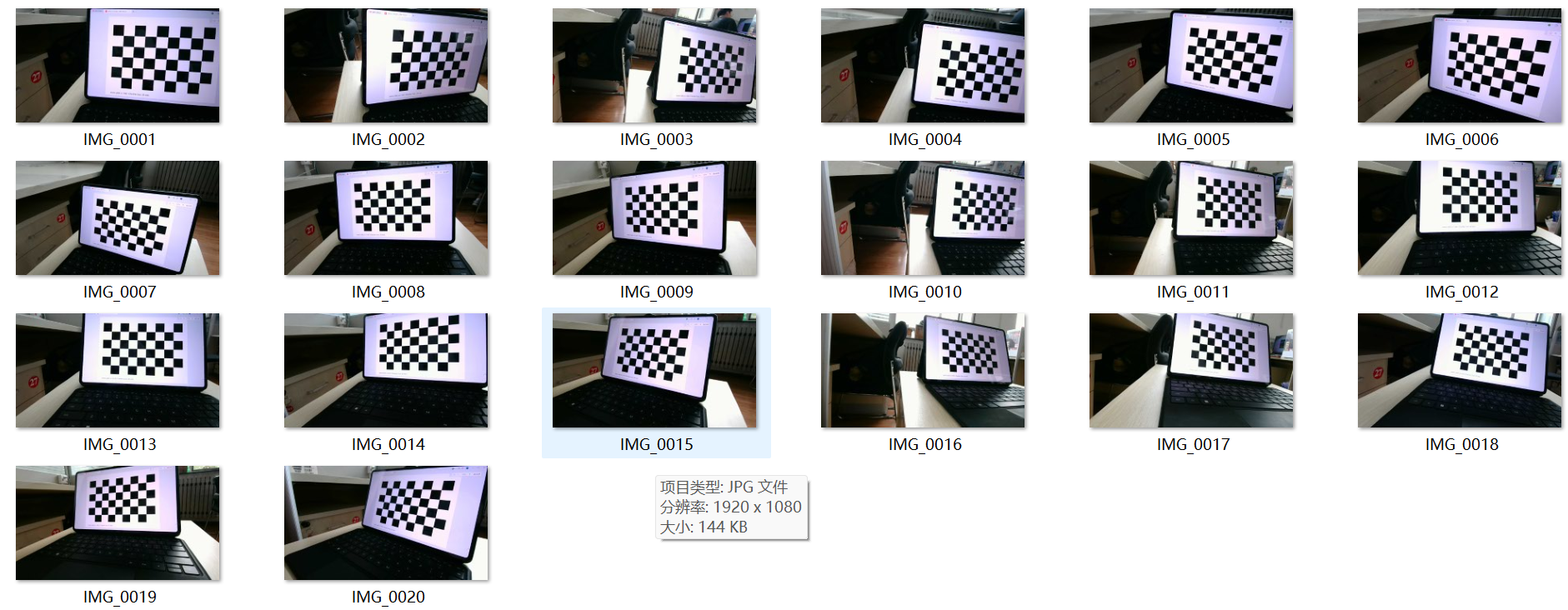
1、采集左右图像
采集做相机图像
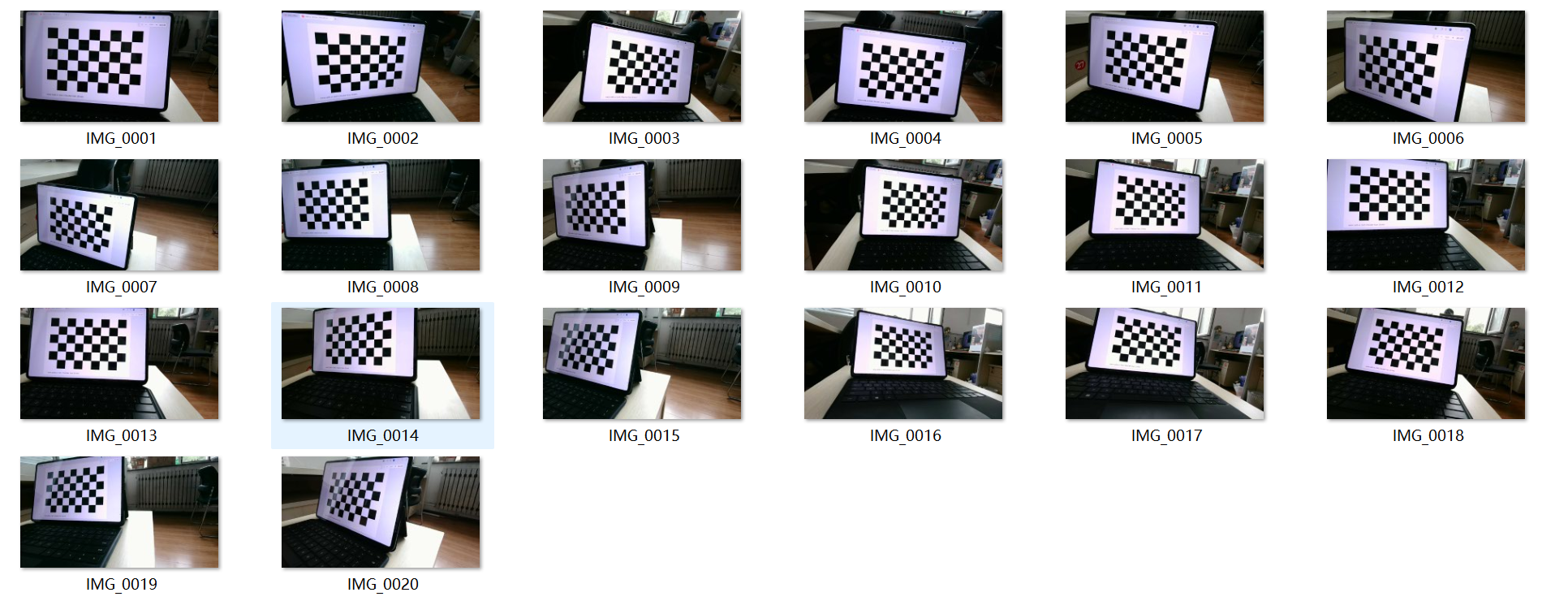
对应的右边相机图像
xml 文件保存图像对,依次为左图、右图、左图、右图。。。。
<?xml version="1.0"?>
<opencv_storage>
<imagelist>"stereo/L/IMG_0001.jpg""stereo/R/IMG_0001.jpg""stereo/L/IMG_0002.jpg""stereo/R/IMG_0002.jpg""stereo/L/IMG_0003.jpg""stereo/R/IMG_0003.jpg""stereo/L/IMG_0004.jpg""stereo/R/IMG_0004.jpg""stereo/L/IMG_0005.jpg""stereo/R/IMG_0005.jpg""stereo/L/IMG_0006.jpg""stereo/R/IMG_0006.jpg""stereo/L/IMG_0007.jpg""stereo/R/IMG_0007.jpg""stereo/L/IMG_0008.jpg""stereo/R/IMG_0008.jpg""stereo/L/IMG_0009.jpg""stereo/R/IMG_0009.jpg""stereo/L/IMG_0010.jpg""stereo/R/IMG_0010.jpg""stereo/L/IMG_0011.jpg""stereo/R/IMG_0011.jpg""stereo/L/IMG_0012.jpg""stereo/R/IMG_0012.jpg""stereo/L/IMG_0013.jpg""stereo/R/IMG_0013.jpg""stereo/L/IMG_0014.jpg""stereo/R/IMG_0014.jpg""stereo/L/IMG_0015.jpg""stereo/R/IMG_0015.jpg""stereo/L/IMG_0016.jpg""stereo/R/IMG_0016.jpg""stereo/L/IMG_0017.jpg""stereo/R/IMG_0017.jpg""stereo/L/IMG_0018.jpg""stereo/R/IMG_0018.jpg""stereo/L/IMG_0019.jpg""stereo/R/IMG_0019.jpg""stereo/L/IMG_0020.jpg""stereo/R/IMG_0020.jpg"
</imagelist>
</opencv_storage>2、求解内外参数
程序
/* This is sample from the OpenCV book. The copyright notice is below *//* *************** License:**************************Oct. 3, 2008Right to use this code in any way you want without warranty, support or any guarantee of it working.BOOK: It would be nice if you cited it:Learning OpenCV: Computer Vision with the OpenCV Libraryby Gary Bradski and Adrian KaehlerPublished by O'Reilly Media, October 3, 2008AVAILABLE AT:http://www.amazon.com/Learning-OpenCV-Computer-Vision-Library/dp/0596516134Or: http://oreilly.com/catalog/9780596516130/ISBN-10: 0596516134 or: ISBN-13: 978-0596516130OPENCV WEBSITES:Homepage: http://opencv.orgOnline docs: http://docs.opencv.orgGitHub: https://github.com/opencv/opencv/************************************************** */#include "opencv2/calib3d.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"#include <vector>
#include <string>
#include <algorithm>
#include <iostream>
#include <iterator>
#include <stdio.h>
#include <stdlib.h>
#include <ctype.h>using namespace cv;
using namespace std;static int print_help(char** argv)
{cout <<" Given a list of chessboard images, the number of corners (nx, ny)\n"" on the chessboards, and a flag: useCalibrated for \n"" calibrated (0) or\n"" uncalibrated \n"" (1: use stereoCalibrate(), 2: compute fundamental\n"" matrix separately) stereo. \n"" Calibrate the cameras and display the\n"" rectified results along with the computed disparity images. \n" << endl;cout << "Usage:\n " << argv[0] << " -w=<board_width default=9> -h=<board_height default=6> -s=<square_size default=1.0> <image list XML/YML file default=stereo_calib.xml>\n" << endl;return 0;
}static void
StereoCalib(const vector<string>& imagelist, Size boardSize, float squareSize, bool displayCorners = false, bool useCalibrated = true, bool showRectified = true)
{if (imagelist.size() % 2 != 0){cout << "Error: the image list contains odd (non-even) number of elements\n";return;}const int maxScale = 4;// ARRAY AND VECTOR STORAGE:vector<vector<Point2f> > imagePoints[2];vector<vector<Point3f> > objectPoints;Size imageSize;int i, j, k, nimages = (int)imagelist.size() / 2;imagePoints[0].resize(nimages);imagePoints[1].resize(nimages);vector<string> goodImageList;for (i = j = 0; i < nimages; i++){for (k = 0; k < 2; k++){const string& filename = imagelist[i * 2 + k];Mat img = imread(filename, 0);if (img.empty())break;if (imageSize == Size())imageSize = img.size();else if (img.size() != imageSize){cout << "The image " << filename << " has the size different from the first image size. Skipping the pair\n";break;}bool found = false;vector<Point2f>& corners = imagePoints[k][j];for (int scale = 1; scale <= maxScale; scale++){Mat timg;if (scale == 1)timg = img;elseresize(img, timg, Size(), scale, scale, INTER_LINEAR_EXACT);found = findChessboardCorners(timg, boardSize, corners,CALIB_CB_ADAPTIVE_THRESH | CALIB_CB_NORMALIZE_IMAGE);if (found){if (scale > 1){Mat cornersMat(corners);cornersMat *= 1. / scale;}break;}}if (displayCorners){cout << filename << endl;Mat cimg, cimg1;cvtColor(img, cimg, COLOR_GRAY2BGR);drawChessboardCorners(cimg, boardSize, corners, found);double sf = 640. / MAX(img.rows, img.cols);resize(cimg, cimg1, Size(), sf, sf, INTER_LINEAR_EXACT);imshow("corners", cimg1);char c = (char)waitKey(500);if (c == 27 || c == 'q' || c == 'Q') //Allow ESC to quitexit(-1);}elseputchar('.');if (!found)break;cornerSubPix(img, corners, Size(11, 11), Size(-1, -1),TermCriteria(TermCriteria::COUNT + TermCriteria::EPS,30, 0.01));}if (k == 2){goodImageList.push_back(imagelist[i * 2]);goodImageList.push_back(imagelist[i * 2 + 1]);j++;}}cout << j << " pairs have been successfully detected.\n";nimages = j;if (nimages < 2){cout << "Error: too little pairs to run the calibration\n";return;}imagePoints[0].resize(nimages);imagePoints[1].resize(nimages);objectPoints.resize(nimages);for (i = 0; i < nimages; i++){for (j = 0; j < boardSize.height; j++)for (k = 0; k < boardSize.width; k++)objectPoints[i].push_back(Point3f(k * squareSize, j * squareSize, 0));}cout << "Running stereo calibration ...\n";Mat cameraMatrix[2], distCoeffs[2];cameraMatrix[0] = initCameraMatrix2D(objectPoints, imagePoints[0], imageSize, 0);cameraMatrix[1] = initCameraMatrix2D(objectPoints, imagePoints[1], imageSize, 0);Mat R, T, E, F;double rms = stereoCalibrate(objectPoints, imagePoints[0], imagePoints[1],cameraMatrix[0], distCoeffs[0],cameraMatrix[1], distCoeffs[1],imageSize, R, T, E, F,CALIB_FIX_ASPECT_RATIO +CALIB_ZERO_TANGENT_DIST +CALIB_USE_INTRINSIC_GUESS +CALIB_SAME_FOCAL_LENGTH +CALIB_RATIONAL_MODEL +CALIB_FIX_K3 + CALIB_FIX_K4 + CALIB_FIX_K5,TermCriteria(TermCriteria::COUNT + TermCriteria::EPS, 100, 1e-5));cout << "done with RMS error=" << rms << endl;// CALIBRATION QUALITY CHECK// because the output fundamental matrix implicitly// includes all the output information,// we can check the quality of calibration using the// epipolar geometry constraint: m2^t*F*m1=0double err = 0;int npoints = 0;vector<Vec3f> lines[2];for (i = 0; i < nimages; i++){int npt = (int)imagePoints[0][i].size();Mat imgpt[2];for (k = 0; k < 2; k++){imgpt[k] = Mat(imagePoints[k][i]);undistortPoints(imgpt[k], imgpt[k], cameraMatrix[k], distCoeffs[k], Mat(), cameraMatrix[k]);computeCorrespondEpilines(imgpt[k], k + 1, F, lines[k]);}for (j = 0; j < npt; j++){double errij = fabs(imagePoints[0][i][j].x * lines[1][j][0] +imagePoints[0][i][j].y * lines[1][j][1] + lines[1][j][2]) +fabs(imagePoints[1][i][j].x * lines[0][j][0] +imagePoints[1][i][j].y * lines[0][j][1] + lines[0][j][2]);err += errij;}npoints += npt;}cout << "average epipolar err = " << err / npoints << endl;// save intrinsic parametersFileStorage fs("intrinsics.yml", FileStorage::WRITE);if (fs.isOpened()){fs << "M1" << cameraMatrix[0] << "D1" << distCoeffs[0] <<"M2" << cameraMatrix[1] << "D2" << distCoeffs[1];fs.release();}elsecout << "Error: can not save the intrinsic parameters\n";Mat R1, R2, P1, P2, Q;Rect validRoi[2];stereoRectify(cameraMatrix[0], distCoeffs[0],cameraMatrix[1], distCoeffs[1],imageSize, R, T, R1, R2, P1, P2, Q,CALIB_ZERO_DISPARITY, 1, imageSize, &validRoi[0], &validRoi[1]);fs.open("extrinsics.yml", FileStorage::WRITE);if (fs.isOpened()){fs << "R" << R << "T" << T << "R1" << R1 << "R2" << R2 << "P1" << P1 << "P2" << P2 << "Q" << Q;fs.release();}elsecout << "Error: can not save the extrinsic parameters\n";// OpenCV can handle left-right// or up-down camera arrangementsbool isVerticalStereo = fabs(P2.at<double>(1, 3)) > fabs(P2.at<double>(0, 3));// COMPUTE AND DISPLAY RECTIFICATIONif (!showRectified)return;Mat rmap[2][2];// IF BY CALIBRATED (BOUGUET'S METHOD)if (useCalibrated){// we already computed everything}// OR ELSE HARTLEY'S METHODelse// use intrinsic parameters of each camera, but// compute the rectification transformation directly// from the fundamental matrix{vector<Point2f> allimgpt[2];for (k = 0; k < 2; k++){for (i = 0; i < nimages; i++)std::copy(imagePoints[k][i].begin(), imagePoints[k][i].end(), back_inserter(allimgpt[k]));}F = findFundamentalMat(Mat(allimgpt[0]), Mat(allimgpt[1]), FM_8POINT, 0, 0);Mat H1, H2;stereoRectifyUncalibrated(Mat(allimgpt[0]), Mat(allimgpt[1]), F, imageSize, H1, H2, 3);R1 = cameraMatrix[0].inv() * H1 * cameraMatrix[0];R2 = cameraMatrix[1].inv() * H2 * cameraMatrix[1];P1 = cameraMatrix[0];P2 = cameraMatrix[1];}//Precompute maps for cv::remap()initUndistortRectifyMap(cameraMatrix[0], distCoeffs[0], R1, P1, imageSize, CV_16SC2, rmap[0][0], rmap[0][1]);initUndistortRectifyMap(cameraMatrix[1], distCoeffs[1], R2, P2, imageSize, CV_16SC2, rmap[1][0], rmap[1][1]);Mat canvas;double sf;int w, h;if (!isVerticalStereo){sf = 600. / MAX(imageSize.width, imageSize.height);w = cvRound(imageSize.width * sf);h = cvRound(imageSize.height * sf);canvas.create(h, w * 2, CV_8UC3);}else{sf = 300. / MAX(imageSize.width, imageSize.height);w = cvRound(imageSize.width * sf);h = cvRound(imageSize.height * sf);canvas.create(h * 2, w, CV_8UC3);}for (i = 0; i < nimages; i++){for (k = 0; k < 2; k++){Mat img = imread(goodImageList[i * 2 + k], 0), rimg, cimg;remap(img, rimg, rmap[k][0], rmap[k][1], INTER_LINEAR);//imshow("0", img);//imshow("1", rimg);//waitKey(0);cvtColor(rimg, cimg, COLOR_GRAY2BGR);Mat canvasPart = !isVerticalStereo ? canvas(Rect(w * k, 0, w, h)) : canvas(Rect(0, h * k, w, h));resize(cimg, canvasPart, canvasPart.size(), 0, 0, INTER_AREA);if (useCalibrated){Rect vroi(cvRound(validRoi[k].x * sf), cvRound(validRoi[k].y * sf),cvRound(validRoi[k].width * sf), cvRound(validRoi[k].height * sf));rectangle(canvasPart, vroi, Scalar(0, 0, 255), 3, 8);}}if (!isVerticalStereo)for (j = 0; j < canvas.rows; j += 16)line(canvas, Point(0, j), Point(canvas.cols, j), Scalar(0, 255, 0), 1, 8);elsefor (j = 0; j < canvas.cols; j += 16)line(canvas, Point(j, 0), Point(j, canvas.rows), Scalar(0, 255, 0), 1, 8);imshow("rectified", canvas);char c = (char)waitKey();if (c == 27 || c == 'q' || c == 'Q')break;}
}static bool readStringList(const string& filename, vector<string>& l)
{l.resize(0);FileStorage fs(filename, FileStorage::READ);if (!fs.isOpened())return false;FileNode n = fs.getFirstTopLevelNode();if (n.type() != FileNode::SEQ)return false;FileNodeIterator it = n.begin(), it_end = n.end();for (; it != it_end; ++it)l.push_back((string)*it);return true;
}int main(int argc, char** argv)
{Size boardSize;string imagelistfn;bool showRectified;//cv::CommandLineParser parser(argc, argv, "{w|9|}{h|6|}{s|1.0|}{nr||}{help||}{@input|stereo_calib.xml|}");//if (parser.has("help"))// return print_help(argv);showRectified = true;imagelistfn = "stereo_calib.xml";boardSize.width = 8;boardSize.height =5;float squareSize = 1;vector<string> imagelist;bool ok = readStringList(imagelistfn, imagelist);if (!ok || imagelist.empty()){cout << "can not open " << imagelistfn << " or the string list is empty" << endl;return print_help(argv);}StereoCalib(imagelist, boardSize, squareSize, true, true, showRectified);return 0;
}只要修改棋盘格的角点
boardSize.width = 8;
boardSize.height =5;
float squareSize = 1;
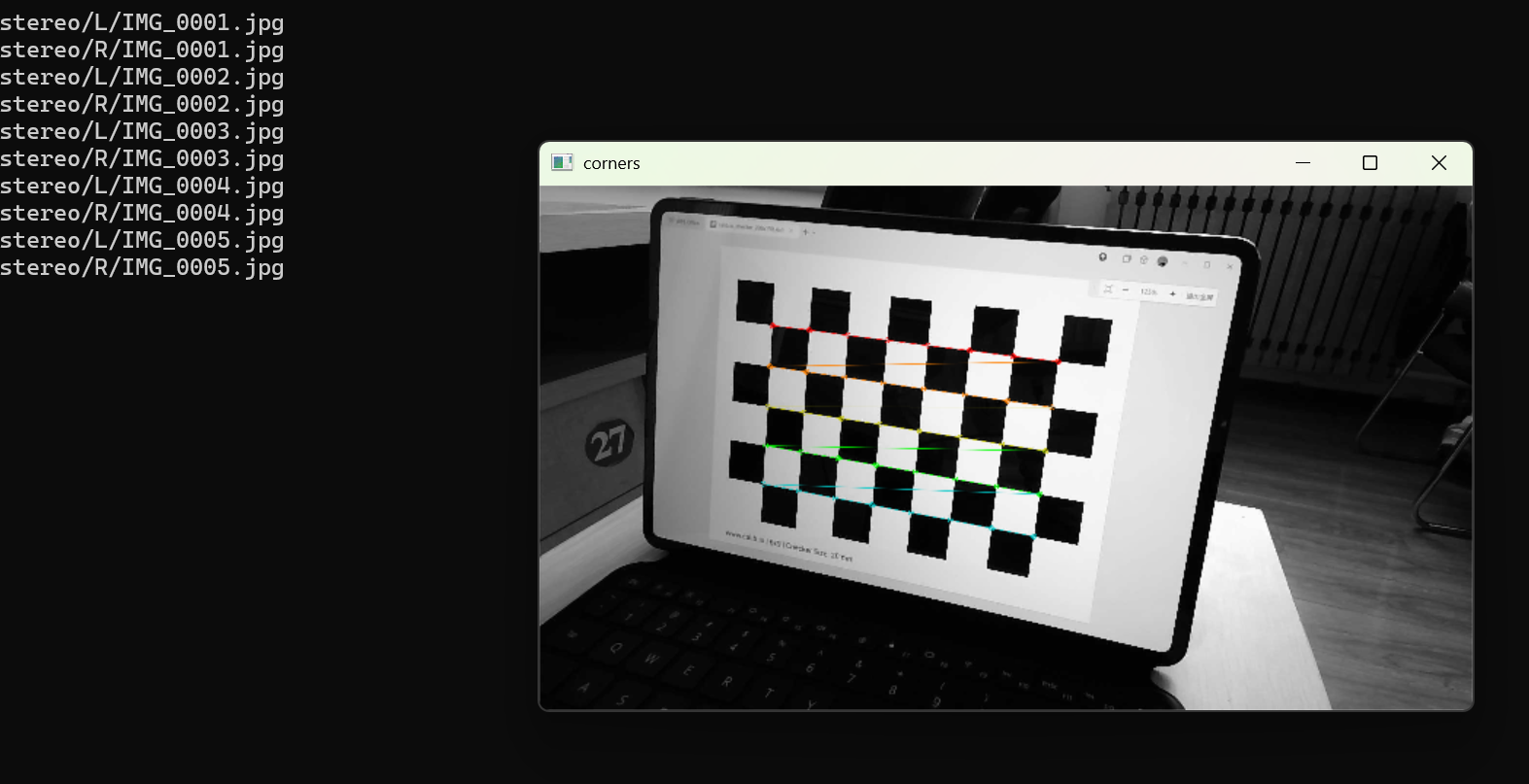
3 、角点匹配
4、矫正结果可视化

可以看到共有20组图片,矫正的误差是0.5 pix,这个数字最好小于1。
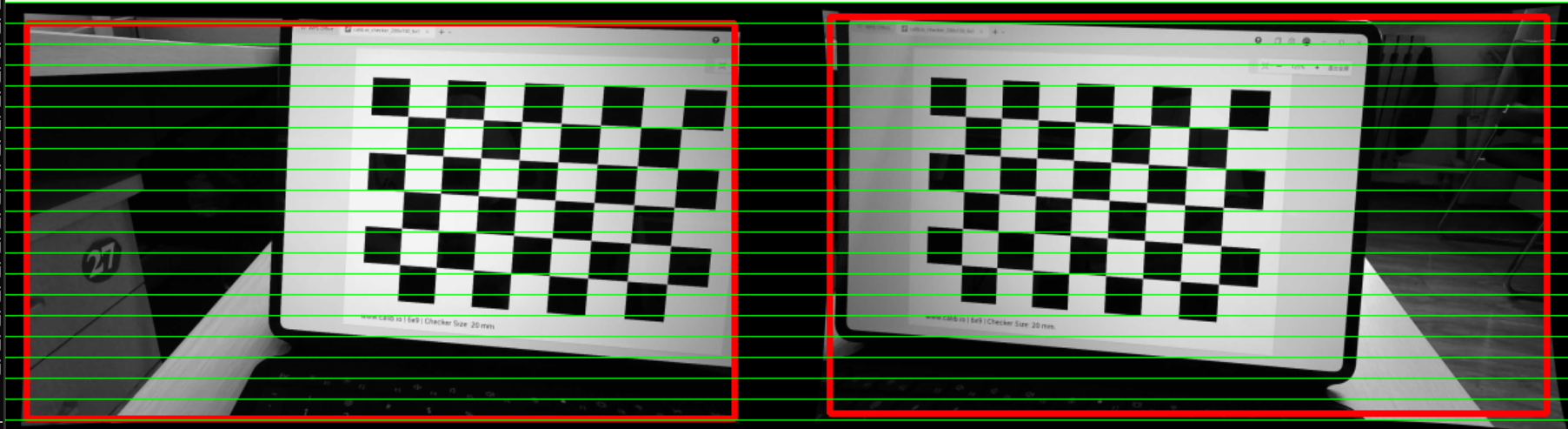
我们可以看到左右图像中,同一位置在在同一水平线上。
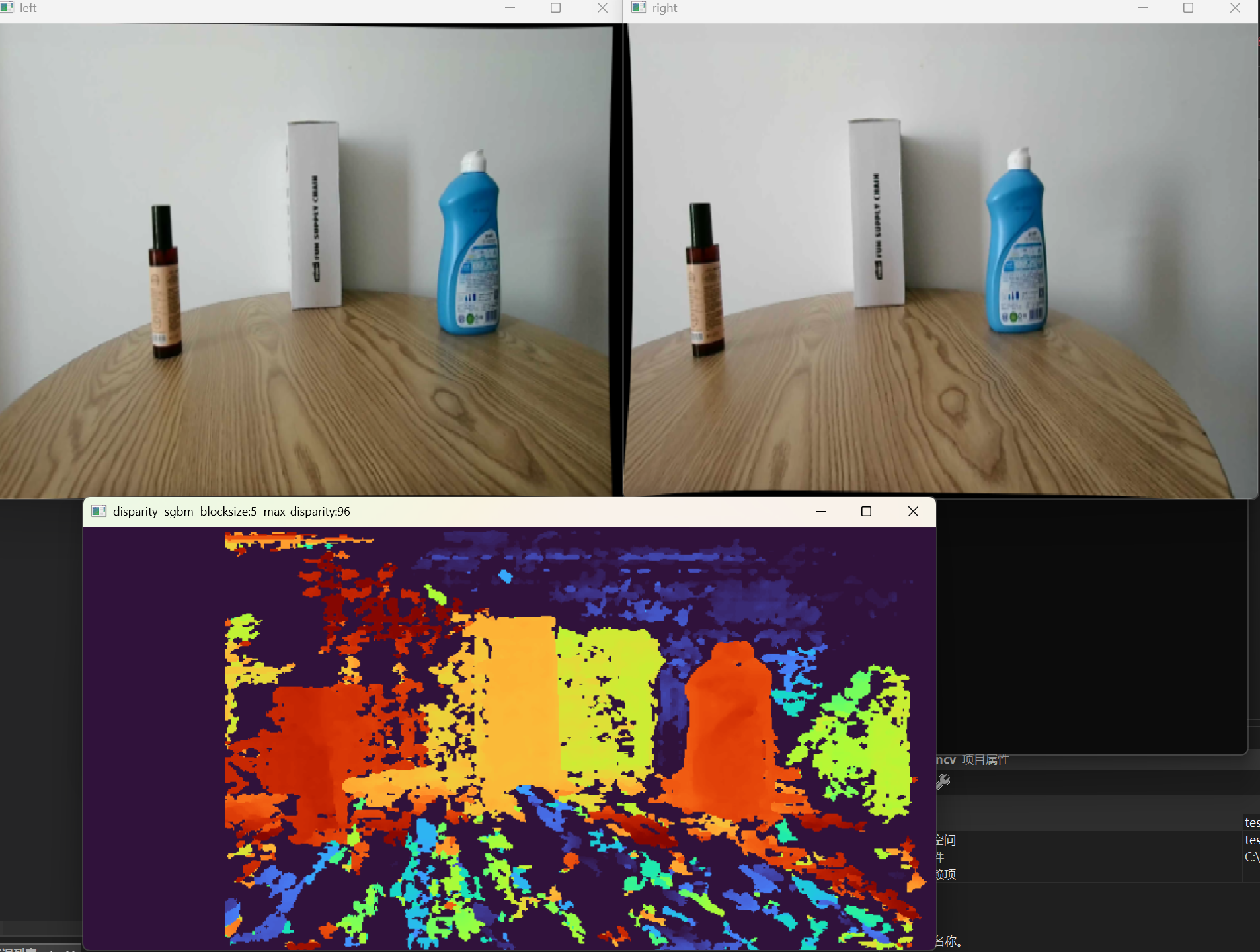
5、SGB算法匹配
/** stereo_match.cpp* calibration** Created by Victor Eruhimov on 1/18/10.* Copyright 2010 Argus Corp. All rights reserved.**/#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/core/utility.hpp"#include <stdio.h>
#include <sstream>
#include <string>
#include <vector>
#include<algorithm>
#include<cstdlib>
#include<fstream>
#include<iostream>
#include<sstream>
#include<vector>
#include<chrono>
#include<iostream>
#include<io.h>using namespace cv;
int get_file_names(const std::string jpg_path, std::vector<std::string>& jpg_names)
{intptr_t Handle;struct _finddata_t FileInfo;std::string p;std::string path = jpg_path;jpg_names.clear();if ((Handle = _findfirst(p.assign(path).append("\\*").c_str(), &FileInfo)) == -1)printf("----\n");else{// printf("---1--%s\n", FileInfo.name);while (_findnext(Handle, &FileInfo) == 0){//printf("---2--%s\n", FileInfo.name);std::string name_tem = FileInfo.name;if (name_tem.length() > 4){jpg_names.push_back(name_tem);}}_findclose(Handle);}return 0;
}static void print_help(char** argv)
{printf("\nDemo stereo matching converting L and R images into disparity and point clouds\n");printf("\nUsage: %s <left_image> <right_image> [--algorithm=bm|sgbm|hh|hh4|sgbm3way] [--blocksize=<block_size>]\n""[--max-disparity=<max_disparity>] [--scale=scale_factor>] [-i=<intrinsic_filename>] [-e=<extrinsic_filename>]\n""[--no-display] [--color] [-o=<disparity_image>] [-p=<point_cloud_file>]\n", argv[0]);
}static void saveXYZ(const char* filename, const Mat& mat)
{const double max_z = 1.0e4;FILE* fp = fopen(filename, "wt");for (int y = 0; y < mat.rows; y++){for (int x = 0; x < mat.cols; x++){Vec3f point = mat.at<Vec3f>(y, x);if (fabs(point[2] - max_z) < FLT_EPSILON || fabs(point[2]) > max_z) continue;fprintf(fp, "%f %f %f\n", point[0], point[1], point[2]);}}fclose(fp);
}int main_(int argc, char** argv)
{std::string img1_filename = "";std::string img2_filename = "";std::string img3_filename = "";std::string intrinsic_filename = "";std::string extrinsic_filename = "";std::string disparity_filename = "";std::string point_cloud_filename = "";enum { STEREO_BM = 0, STEREO_SGBM = 1, STEREO_HH = 2, STEREO_VAR = 3, STEREO_3WAY = 4, STEREO_HH4 = 5 };int alg = STEREO_SGBM;int SADWindowSize, numberOfDisparities;bool no_display;bool color_display;float scale;Ptr<StereoBM> bm = StereoBM::create(16, 9);Ptr<StereoSGBM> sgbm = StereoSGBM::create(0, 16, 3);//cv::CommandLineParser parser(argc, argv,// "{@arg1||}{@arg2||}{help h||}{algorithm||}{max-disparity|0|}{blocksize|0|}{no-display||}{color||}{scale|1|}{i||}{e||}{o||}{p||}");//if (parser.has("help"))//{// print_help(argv);// return 0;//}img1_filename = "Left_0001_20250323_084427.JPG";img2_filename = "Right_0001_20250323_084427.JPG";img3_filename = "";//if (parser.has("algorithm"))//{// std::string _alg = parser.get<std::string>("algorithm");// alg = _alg == "bm" ? STEREO_BM :// _alg == "sgbm" ? STEREO_SGBM :// _alg == "hh" ? STEREO_HH :// _alg == "var" ? STEREO_VAR :// _alg == "hh4" ? STEREO_HH4 :// _alg == "sgbm3way" ? STEREO_3WAY : -1;//}alg = STEREO_SGBM;numberOfDisparities = 96;SADWindowSize = 5;scale = 0.3;no_display = false;color_display = true;extrinsic_filename = "extrinsics.yml";intrinsic_filename = "intrinsics.yml";disparity_filename = "disparity_filename.png";point_cloud_filename = "point_cloud_filename.png";//if (alg < 0)//{// printf("Command-line parameter error: Unknown stereo algorithm\n\n");// print_help(argv);// return -1;//}if (numberOfDisparities < 1 || numberOfDisparities % 16 != 0){printf("Command-line parameter error: The max disparity (--maxdisparity=<...>) must be a positive integer divisible by 16\n");print_help(argv);return -1;}if (scale < 0){printf("Command-line parameter error: The scale factor (--scale=<...>) must be a positive floating-point number\n");return -1;}if (SADWindowSize < 1 || SADWindowSize % 2 != 1){printf("Command-line parameter error: The block size (--blocksize=<...>) must be a positive odd number\n");return -1;}if (img1_filename.empty() || img2_filename.empty()){printf("Command-line parameter error: both left and right images must be specified\n");return -1;}if ((!intrinsic_filename.empty()) ^ (!extrinsic_filename.empty())){printf("Command-line parameter error: either both intrinsic and extrinsic parameters must be specified, or none of them (when the stereo pair is already rectified)\n");return -1;}if (extrinsic_filename.empty() && !point_cloud_filename.empty()){printf("Command-line parameter error: extrinsic and intrinsic parameters must be specified to compute the point cloud\n");return -1;}int color_mode = alg == STEREO_BM ? 0 : -1;std::string img_path = "C:/Users/11364/source/repos/mine/test_opencv3/test_opencv/MOV2/";std::vector<std::string> jpg_names;std::cout << "Read path: " << img_path << std::endl;int i = 0;get_file_names(img_path, jpg_names);for (std::string jpg_name : jpg_names){std::string right_name;std::string dis_name;std::cout <<"All jpg names:" << jpg_name << std::endl;std::cout << "jpg_name find left:" << jpg_name.find("left") << std::endl;if (jpg_name.find("l") ==9){std::cout << "Left========:" << jpg_name << std::endl;std::string left_= jpg_name;std::string left_2 = jpg_name;right_name = left_.replace(left_.begin()+9, left_.end(), "right.jpg");std::cout << "Right=====:" << right_name << std::endl;dis_name = left_.replace(left_.begin() + 9, left_.end(), "dis.jpg");std::cout << "dis_name====:" << dis_name << std::endl;}else{continue;}img1_filename = img_path + jpg_name;img2_filename = img_path + right_name;img3_filename = img_path + dis_name;Mat img1 = imread(img1_filename, color_mode);Mat img2 = imread(img2_filename, color_mode);//std::cout << "img1_filename:" << img1_filename << std::endl;//std::cout << "img2_filename:" << img2_filename << std::endl;if (img1.empty()){printf("Command-line parameter error: could not load the first input image file\n");return -1;}if (img2.empty()){printf("Command-line parameter error: could not load the second input image file\n");return -1;}if (scale != 1.f){Mat temp1, temp2;int method = scale < 1 ? INTER_AREA : INTER_CUBIC;resize(img1, temp1, Size(), scale, scale, method);img1 = temp1;resize(img2, temp2, Size(), scale, scale, method);img2 = temp2;}//Mat enhanced, filtered, gradient;// 1. CLAHE增强对比度//Ptr<CLAHE> clahe = createCLAHE(3.0, Size(8, 8));//clahe->apply(img1, img1);//clahe->apply(img2, img2);// 2. 导向滤波降噪//Ptr<ximgproc::GuidedFilter> guidedFilter = ximgproc::createGuidedFilter(enhanced, 5);////guidedFilter->filter(enhanced, filtered);// 3. 计算梯度//Sobel(img1, img1, CV_8UC1, 1, 1);//Sobel(img2, img2, CV_8UC1, 1, 1);normalize(img1, img1, 0, 255, NORM_MINMAX, CV_8UC1);normalize(img2, img2, 0, 255, NORM_MINMAX, CV_8UC1);Size img_size = img1.size();Rect roi1, roi2;Mat Q;if (!intrinsic_filename.empty()){// reading intrinsic parametersFileStorage fs(intrinsic_filename, FileStorage::READ);if (!fs.isOpened()){printf("Failed to open file %s\n", intrinsic_filename.c_str());return -1;}Mat M1, D1, M2, D2;fs["M1"] >> M1;fs["D1"] >> D1;fs["M2"] >> M2;fs["D2"] >> D2;M1 *= scale;M2 *= scale;fs.open(extrinsic_filename, FileStorage::READ);if (!fs.isOpened()){printf("Failed to open file %s\n", extrinsic_filename.c_str());return -1;}Mat R, T, R1, P1, R2, P2;fs["R"] >> R;fs["T"] >> T;cv::stereoRectify(M1, D1, M2, D2, img_size, R, T, R1, R2, P1, P2, Q, CALIB_ZERO_DISPARITY, -1, img_size, &roi1, &roi2);Mat map11, map12, map21, map22;cv::initUndistortRectifyMap(M1, D1, R1, P1, img_size, CV_16SC2, map11, map12);cv::initUndistortRectifyMap(M2, D2, R2, P2, img_size, CV_16SC2, map21, map22);Mat img1r, img2r;cv::remap(img1, img1r, map11, map12, INTER_LINEAR);cv::remap(img2, img2r, map21, map22, INTER_LINEAR);img1 = img1r;img2 = img2r;}numberOfDisparities = numberOfDisparities > 0 ? numberOfDisparities : ((img_size.width / 8) + 15) & -16;bm->setROI1(roi1);bm->setROI2(roi2);bm->setPreFilterCap(31);bm->setBlockSize(SADWindowSize > 0 ? SADWindowSize : 15);bm->setMinDisparity(0);bm->setNumDisparities(numberOfDisparities);bm->setTextureThreshold(10);bm->setUniquenessRatio(15);bm->setSpeckleWindowSize(100);bm->setSpeckleRange(32);bm->setDisp12MaxDiff(1);sgbm->setPreFilterCap(63);int sgbmWinSize = SADWindowSize > 0 ? SADWindowSize : 3;sgbm->setBlockSize(sgbmWinSize);int cn = img1.channels();sgbm->setP1(8 * cn * sgbmWinSize * sgbmWinSize);sgbm->setP2(32 * cn * sgbmWinSize * sgbmWinSize);sgbm->setMinDisparity(0);sgbm->setNumDisparities(numberOfDisparities);sgbm->setUniquenessRatio(10);sgbm->setSpeckleWindowSize(100);sgbm->setSpeckleRange(32);sgbm->setDisp12MaxDiff(1);if (alg == STEREO_HH)sgbm->setMode(StereoSGBM::MODE_HH);else if (alg == STEREO_SGBM)sgbm->setMode(StereoSGBM::MODE_SGBM);else if (alg == STEREO_HH4)sgbm->setMode(StereoSGBM::MODE_HH4);else if (alg == STEREO_3WAY)sgbm->setMode(StereoSGBM::MODE_SGBM_3WAY);Mat disp, disp8;int64 t = getTickCount();float disparity_multiplier = 1.0f;if (alg == STEREO_BM){bm->compute(img1, img2, disp);if (disp.type() == CV_16S)disparity_multiplier = 16.0f;}else if (alg == STEREO_SGBM || alg == STEREO_HH || alg == STEREO_HH4 || alg == STEREO_3WAY){sgbm->compute(img1, img2, disp);if (disp.type() == CV_16S)disparity_multiplier = 16.0f;}t = getTickCount() - t;printf("Time elapsed: %fms\n", t * 1000 / getTickFrequency());//disp = dispp.colRange(numberOfDisparities, img1p.cols);if (alg != STEREO_VAR)disp.convertTo(disp8, CV_8U, 255 / (numberOfDisparities * 16.));elsedisp.convertTo(disp8, CV_8U);Mat disp8_3c;if (color_display)cv::applyColorMap(disp8, disp8_3c, COLORMAP_TURBO);if (!disparity_filename.empty())imwrite(disparity_filename, color_display ? disp8_3c : disp8);if (!point_cloud_filename.empty()){printf("storing the point cloud...");fflush(stdout);Mat xyz;Mat floatDisp;//disp.convertTo(floatDisp, CV_32F, 1.0f / disparity_multiplier);reprojectImageTo3D(floatDisp, xyz, Q, true);saveXYZ(point_cloud_filename.c_str(), xyz);printf("\n");}if (!no_display){std::ostringstream oss;oss << "disparity " << (alg == STEREO_BM ? "bm" :alg == STEREO_SGBM ? "sgbm" :alg == STEREO_HH ? "hh" :alg == STEREO_VAR ? "var" :alg == STEREO_HH4 ? "hh4" :alg == STEREO_3WAY ? "sgbm3way" : "");oss << " blocksize:" << (alg == STEREO_BM ? SADWindowSize : sgbmWinSize);oss << " max-disparity:" << numberOfDisparities;std::string disp_name = oss.str();namedWindow("left", cv::WINDOW_NORMAL);imshow("left", img1);imwrite("Rec_L.png", img1);namedWindow("right", cv::WINDOW_NORMAL);imshow("right", img2);imwrite("Rec_R.png", img2);namedWindow(disp_name, cv::WINDOW_NORMAL);imshow(disp_name, color_display ? disp8_3c : disp8);imwrite(img3_filename, color_display ? disp8_3c : disp8);cv::waitKey(0);printf("press ESC key or CTRL+C to close...");fflush(stdout);printf("\n");}}return 0;
}匹配结果
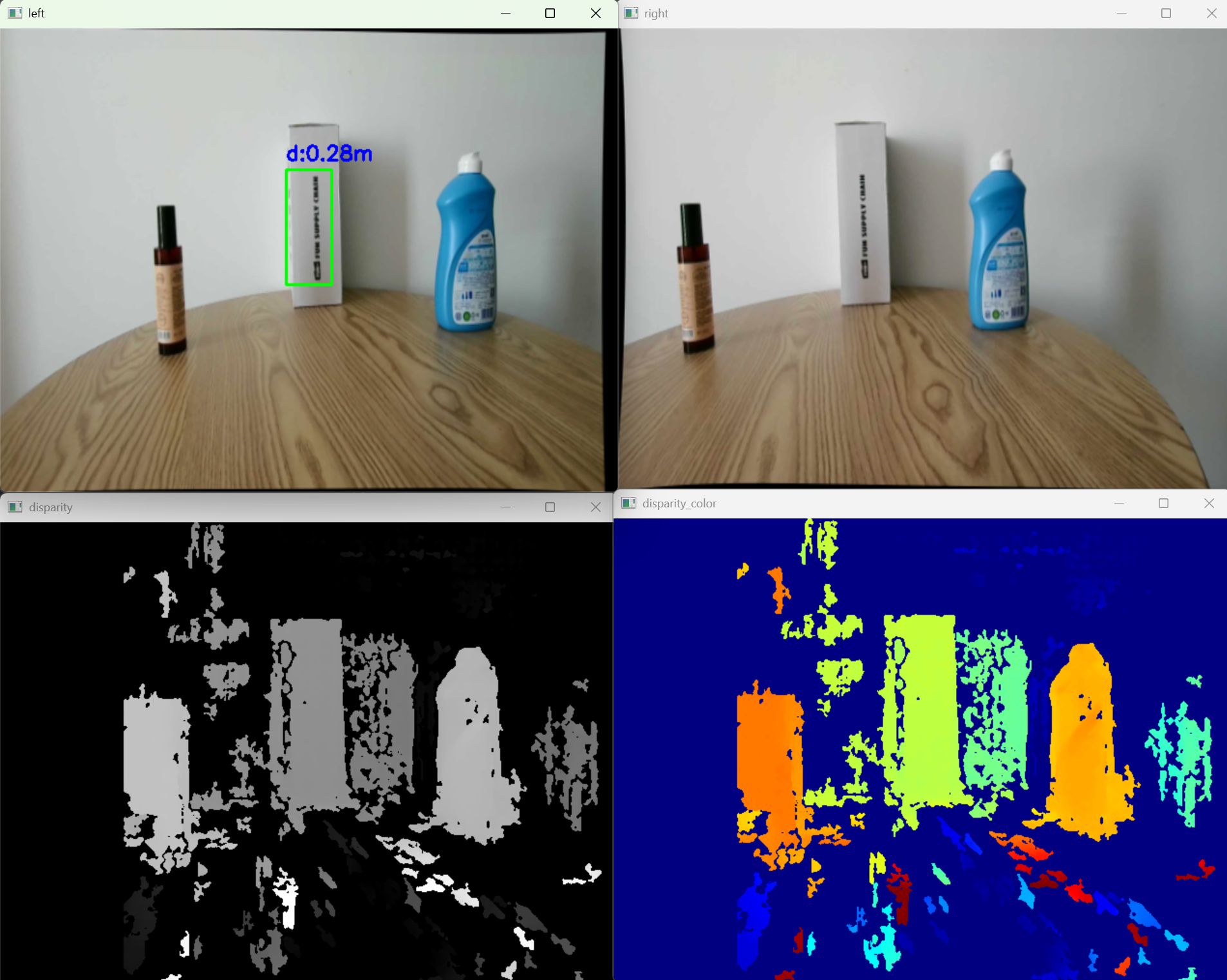
6、求取距离
基于4 中算出的视差图,根据公式z=bf/d。 b 是基线距离,f 是焦距,d是视差,z是相机距离物体的距离。可以算出距离。
代码如下
import cv2
import numpy as np
import time# 读取图像
imgR = cv2.imread('Rec_R.png') # 左图
imgL = cv2.imread('Rec_L.png') # 右图if imgL is None or imgR is None:raise ValueError("无法读取图像,请检查文件路径!")# 调整图像大小并转换为灰度图(SGBM对灰度图处理更稳定)
imgL = cv2.resize(imgL, (640, 480))
imgR = cv2.resize(imgR, (640, 480))
grayL = cv2.cvtColor(imgL, cv2.COLOR_BGR2GRAY)
grayR = cv2.cvtColor(imgR, cv2.COLOR_BGR2GRAY)# 相机内参(示例值,需根据实际标定结果修改)
focal_length = 100 # 焦距(像素)
baseline = 0.2 # 基线距离(米,左右相机光心间距)# SGBM参数优化
blockSize = 5
img_channels = 3
stereo = cv2.StereoSGBM_create(minDisparity=0, # 最小视差值(通常从0开始)numDisparities=128, # 视差范围(必须是16的倍数)blockSize=blockSize,P1=8 * img_channels * blockSize ** 2, # 平滑项参数(小值保留细节)P2=32 * img_channels * blockSize ** 2, # 平滑项参数(P2 > P1,大值抑制噪声)disp12MaxDiff=1, # 左右视差一致性检查阈值(避免错误匹配)preFilterCap=31, # 预处理滤波截断值(推荐15-63,保留更多纹理)uniquenessRatio=15, # 唯一性检查阈值(10-20,过滤模糊匹配)speckleWindowSize=100, # 散斑噪声窗口大小(过滤小区域噪声)speckleRange=16, # 散斑噪声允许的视差变化范围(推荐1-16)mode=cv2.STEREO_SGBM_MODE_HH # 高精度模式
)# 计时并计算视差
start_time = time.time()
disparity = stereo.compute(grayL, grayR) # 修正输入顺序:左图->右图
end_time = time.time()
print(f"视差计算耗时:{end_time - start_time:.2f}秒")# 视差图后处理(转换为真实视差值并过滤无效值)
disparity = disparity.astype(np.float32) / 16.0 # SGBM输出需除以16得到真实视差
disparity[disparity <= 0] = 0 # 过滤无效视差(<=0的值)# 生成可视化结果
disp_gray = cv2.normalize(disparity, None, 0, 255, cv2.NORM_MINMAX, cv2.CV_8U) # 灰度图
dis_color = cv2.applyColorMap(disp_gray, cv2.COLORMAP_JET) # 彩色图(更直观)# 计算深度图(基于三角测量公式:深度 = (焦距 × 基线) / 视差)
depth = np.zeros_like(disparity)
valid = disparity > 0 # 只计算有效视差区域
depth[valid] = (focal_length * baseline) / disparity[valid]# 鼠标交互变量
drawing = False # 是否正在绘制矩形
ix, iy = -1, -1 # 矩形起始坐标
fx, fy = -1, -1 # 矩形结束坐标# 鼠标回调函数 - 框选区域并显示平均距离
def mouse_callback(event, x, y, flags, param):global drawing, ix, iy, fx, fy, imgL_copyif event == cv2.EVENT_LBUTTONDOWN:drawing = Trueix, iy = x, yimgL_copy = imgL.copy() # 复制原图用于绘制elif event == cv2.EVENT_MOUSEMOVE:if drawing:imgL_copy = imgL.copy() # 清除之前的矩形cv2.rectangle(imgL_copy, (ix, iy), (x, y), (0, 255, 0), 2)cv2.imshow('left', imgL_copy)elif event == cv2.EVENT_LBUTTONUP:drawing = Falsefx, fy = x, ycv2.rectangle(imgL_copy, (ix, iy), (fx, fy), (0, 255, 0), 2)# 确保坐标顺序正确x1, y1 = min(ix, fx), min(iy, fy)x2, y2 = max(ix, fx), max(iy, fy)# 提取选定区域的深度值region = depth[y1:y2, x1:x2]valid_region = region[region > 0] # 只考虑有效深度值if valid_region.size > 0:# 计算平均距离(保留两位小数)avg_distance = round(np.mean(valid_region), 2)# 在图像上显示结果result_text = "d:"+ str(round(avg_distance,2))+"m"cv2.putText(imgL_copy, result_text, (x1, y1 - 10),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255, 0, 0), 2)cv2.imshow('left', imgL_copy)print(f"选定区域: {x1},{y1} 到 {x2},{y2}")print(f"平均距离: {avg_distance} 米")print(f"区域大小: {region.shape[1]}x{region.shape[0]} 像素")print(f"有效像素: {valid_region.size} / {region.size}")else:cv2.putText(imgL_copy, "无有效深度数据", (x1, y1 - 10),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)cv2.imshow('left', imgL_copy)print("选定区域无有效深度数据")# 设置鼠标回调
cv2.namedWindow('left')
cv2.setMouseCallback('left', mouse_callback)# 显示结果
imgL_copy = imgL.copy()
cv2.imshow('left', imgL_copy)
cv2.imshow('right', imgR)
cv2.imshow('disparity', disp_gray)
cv2.imshow('disparity_color', dis_color)# 按ESC退出
while True:key = cv2.waitKey(1) & 0xFFif key == 27: # ESC键breakcv2.destroyAllWindows()
7、b 站视频链接
https://www.bilibili.com/video/BV1BRgpzgEQK/
创作不易 需要指导 可私信或者加V