【32】C++实战篇—— m行n列的坐标点,求每行相邻点X差值dX,每列相邻点y差值dY,并以矩阵形式左端对齐
文章目录
- 1 代码实现
- 2 示例验证
m行n列的坐标点,求每行相邻点X差值dX,每列相邻点y差值dY,并以矩阵形式左端对齐
例如:
vector< cv::Point2f>Center中存储了3行3列的9个点,现在求每行相邻点X差值,那么每行有3-1个差值,一共有3行,就以32的形式输出;每列相邻点y差值,那么每列有3-1个差值,一共有3列,就以23的形式输出;
1 代码实现
//输出3*3点阵坐标的行距、列距
int PutRowandColSpace(vector< cv::Point2f> Center)
{// 确保 points 包含了9个点if (Center.size() != 9) {std::cerr << "Error: The number of points should be 9." << std::endl;return -1; // 或者执行错误处理}// 计算每行相邻点的X差值并输出cout << "每行相邻点的X差值:" << endl;for (int i = 0; i < 3; ++i) {for (int j = 0; j < 2; ++j) {float dx = Center[i * 3 + j + 1].x - Center[i * 3 + j].x;cout << setw(5) << dx;}cout << endl;}// 计算每列相邻点的Y差值并输出cout << "每列相邻点的Y差值:" << endl;for (int i = 0; i < 2; ++i) {for (int j = 0; j < 3; ++j) {float dy = Center[(i + 1) * 3 + j].y - Center[i * 3 + j].y;cout << setw(5) << dy;}cout << endl;}return 0;
}
对于cv::Point2f Center[9]此方法同样适用,只是改一下入口参数即可
////输出3*3点阵坐标的行距、列距
int PutRowandColSpace2(cv::Point2f Center[9])
{// 计算每行相邻点的X差值并输出cout << "每行相邻点的X差值:" << endl;for (int i = 0; i < 3; ++i) {for (int j = 0; j < 2; ++j) {float dx = Center[i * 3 + j + 1].x - Center[i * 3 + j].x;cout << setw(10) << dx;}cout << endl;}// 计算每列相邻点的Y差值并输出cout << "每列相邻点的Y差值:" << endl;for (int i = 0; i < 2; ++i) {for (int j = 0; j < 3; ++j) {float dy = Center[(i + 1) * 3 + j].y - Center[i * 3 + j].y;cout << setw(10) << dy;}cout << endl;}return 0;
}
2 示例验证
如图,在图片中找到9个点圆点坐标,现在需要检查9个圆心每行相邻点间距,和每列相邻点间距是否是否一致;
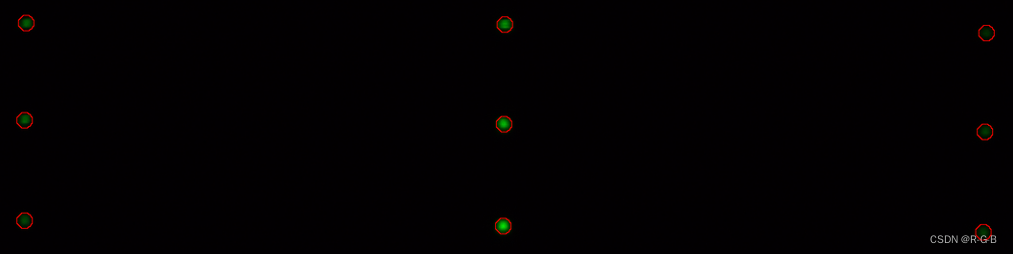
已求得9个圆心
[863.396, 626.316] [1484.38, 628.124] [2108.53, 639.256]
[861.457, 751.556] [1482.73, 756.879] [2107.33, 766.905]
[861.085, 881.949] [1481.89, 889.102] [2104.66, 897.348]
3*3点阵行距、列距:
每行相邻点的X差值:620.984 624.151621.274 624.599620.803 622.774每列相邻点的Y差值:125.241 128.755 127.649130.393 132.223 130.443