智能驾驶再提速!批量苏州金龙L4级自动驾驶巴士交付杭州临平区
近日,由苏州金龙海格客车研发的“清源”L4级自动驾驶巴士现身杭州市临平区并投入测试。这是临平区引进的首批L4级自动驾驶巴士,标志着临平区智能交通建设迈入新阶段。

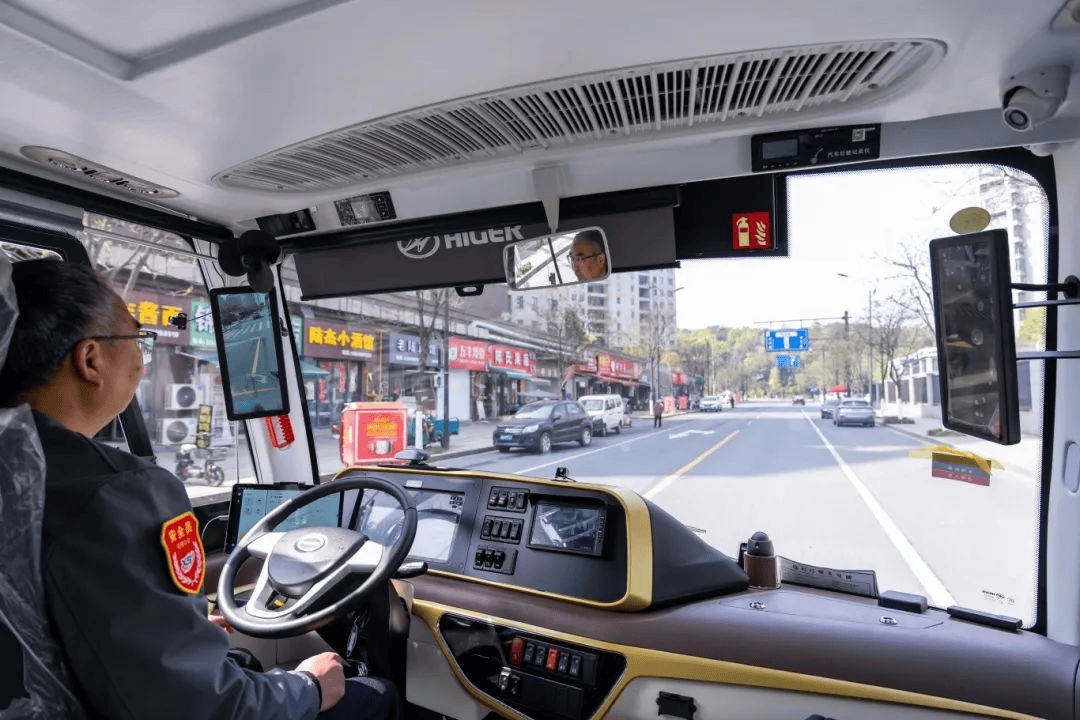
此次投入测试的“清源”小巴采用一级踏步设计,车身延续了海格蔚蓝巴士的经典设计,外观采用柔和线条设计,科技感十足,搭配上银黑配色设计辨识度极高。与普通巴士相比,该款自动驾驶巴士最大的不同是周身遍布激光雷达、毫米波雷达等,这些都是自动驾驶巴士的“眼睛”。据悉,该批自动驾驶巴士搭载了最新的智能网联核心技术,基于高精度地图和定位的环境感知、智能决策、路径规划等功能。在实际运行中,自动巴士能够自主识别红绿灯、行人及障碍物,实现自动启停、灵活避让和智能超车、减速等,展现出高度可靠的自动驾驶能力。测试完成后,这批巴士预计将投入云栖小镇至高铁站等接驳线路运营,为市民提供新奇、安全、便捷的出行新体验。

今年以来,苏州金龙已向杭州市桐庐县、临平区、余杭区累计交付13台L4级自动驾驶巴士。其中,桐庐县首条自动驾驶公交线路Z01已于今年4月底开通运营。该线路由桐庐潇洒公交公司负责运营,全程12公里,设11个站点,日均运行8个班次。“为了避开早晚高峰,Z01线路运营时间设定为每天上午9点至下午3点,每45分钟一班,共8个班次。”桐庐潇洒公交公司相关负责人介绍道,车上还配备了桐庐全域旅游指南、桐庐各大旅游景点宣传手册等,供有需要的乘客免费领取。

苏州金龙在智能网联领域坚持十余年研发投入,从2010年推出第一代G-BOS车联网、2014年开展线控底盘研究,先后掌握自主研发线控底盘、核心算法等关键技术,获得智能客车相关专利70余项,其中发明专利10项。苏州金龙智能网联技术规划早、产品迭代升级快,自动驾驶MiniBus、无人低速作业车、L4级自动驾驶RoboBus、L4级自动驾驶公交持续迭代升级,落地应用,已形成“自动驾驶+无人作业+远程操控+人机交互”的智能网联场景应用闭环。
2024年乌镇互联网大会期间,6辆”清源”小巴圆满完成嘉宾接驳任务,向全球展示了中国自动驾驶技术的成熟度。截至目前,苏州金龙”深蓝”、”清源”等智能网联车型已在上海、天津、浙江、江苏等多地实现商业化运营,累计自动驾驶里程超100万公里,服务乘客数十万人次。

随着自动驾驶技术的不断成熟和政策环境的逐步完善,苏州金龙将继续深耕智能驾驶赛道,推动智能网联巴士在更多场景落地应用,为智慧城市建设和交通强国战略贡献力量。