当送餐机器人学会“思考“:Deepoc如何赋予机器人具身智能
在餐厅里,你或许见过那些沿着固定路线移动的送餐机器人——它们能准确送达食物,但遇到突发情况就会"不知所措"。现在,通过Deepoc 具身智能拓展板开发板研发的智能升级方案,Deepoc具身智能拓展板在不破坏原有机器人结构的基础上,使机器人可以拥有大模型对话,大模型处理行业事务,大模型控制运动的功能。
这些机器人正在获得真正的"思考能力",就像进行了一场精妙的"大脑移植手术"。
传统机器人的局限:为什么它们显得"笨拙"?
目前大多数餐厅使用的送餐机器人,主要分为两大类:第一大类,本质上是一台"高级遥控车"。它们依靠预设程序工作:厨房工作人员输入桌号,机器人就沿着地面上的二维码或磁条轨道移动,遇到障碍物就停下,到达目的地后播放录制好的语音。另一类送餐机器人采用激光雷达导航系统,还有实时扫描周围环境来构建的餐厅地图。这些机器人工作时,激光雷达会不断发射激光束探测障碍物,就像蝙蝠用声波探路一样。它们能自动规划路径并避开固定障碍物,但遇到移动的顾客时反应较慢,且需要保持餐厅布局固定才能准确定位。虽然比轨道式机器人灵活,但仍无法理解复杂指令或适应频繁变动的环境。

这种设计存在三个根本缺陷:
首先,环境适应能力差。当餐厅临时调整桌椅布局,或者有顾客把行李箱放在过道时,机器人就会陷入"死机"状态。去年上海某连锁餐厅的统计显示,传统机器人平均每天需要人工干预4-7次,主要就是因为这类环境变化。
其次,交互能力极其有限。如果你对机器人说"请把牛排放在靠窗的座位",它完全无法理解。现有系统通常只能识别"3号桌""返回"等几个固定短语,就像老式手机的T9键盘,只能输入预设好的文字。
最重要的是,缺乏应变决策能力。当遇到餐盘倾斜可能洒落时,人类服务员会自然放慢脚步调整平衡,但传统机器人只会继续匀速前进。北京理工大学2023年的研究发现,这导致机器人送餐的液体洒落率是人工服务的3倍。
具身智能:让机器获得"常识"
具身模型拓展开发板的解决方案源自一个前沿概念——具身智能(Embodied Intelligence)。这种技术让机器像人类一样,通过身体与环境的互动来学习"常识"。
想象教小朋友端汤:他们通过眼睛观察汤碗的晃动,手指感受温度,身体调整平衡,最终学会平稳运送。具身智能机器人也是同理,通过三种核心能力实现智能化:
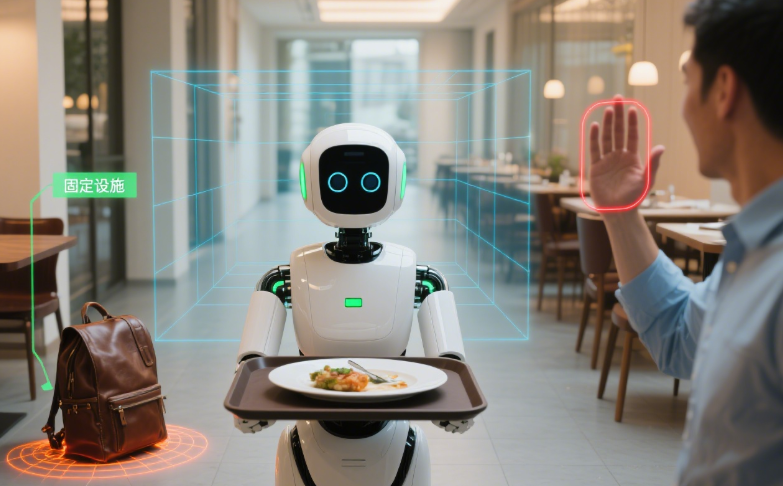
视觉理解:不再是简单的障碍物检测,而是真正"看懂"场景。能区分临时放置的包包和固定桌椅,识别顾客的招手动作,甚至判断餐盘的倾斜角度。这套系统采用类似人眼的立体视觉技术,通过双摄像头构建3D环境模型。
语言理解:突破关键词识别的限制。当顾客说"把饮料给戴红帽子的女士",机器人能结合视觉信息准确定位目标。测试显示,升级后的系统能理解92%的日常用餐用语,接近人类服务员的95%理解率。
自主决策:形成"感知-思考-行动"的完整闭环。比如发现目标座位被占时,会主动询问:"需要为您更换到其他位置吗?"这种能力依赖于特殊的决策算法,能在0.3秒内评估多种方案并选择最优解。
具身模型拓展开发板:即插即用的智能升级方案
这套系统的精妙之处在于,餐厅无需淘汰现有设备。具身模型拓展开发板就像给机器人安装的"智能大脑",通过标准化接口与主流品牌机器人连接,安装过程不超过20分钟。
开发板的核心是一组高度集化的AI芯片,其运算能力相当于一台游戏电脑,但经过专门优化用于机器人控制。它包含三个关键模块:
环境感知模块:采用双目立体视觉+ToF深度传感器,每秒30次扫描周围环境,构建厘米级精度的3D地图。通过深度学习算法,不仅能识别障碍物轮廓,还能判断物体材质(如区分玻璃门和墙体),确保在复杂环境中安全导航。
语音交互模块:搭载8麦克风环形阵列,配合波束成形技术,可在75分贝噪音环境下实现95%的语音识别准确率。独创的"声纹跟随"功能,能自动追踪正在说话的顾客,实现自然的多轮对话交互体验。
运动控制模块:基于强化学习算法,实时分析载重、地面摩擦力和运动惯性等12项参数。当检测到餐盘倾斜时,能在0.1秒内自动调节轮毂电机扭矩和移动速度,确保汤汁类餐品运送平稳不洒落。
实际测试数据显示,升级后的机器人表现出显著优势:
- 送餐效率提升40%,因能自主规划最优路径
- 顾客满意度评分从3.2/5提高到4.6/5
- 人工干预次数从日均5次降至0.8次

即将到来的服务革命
行业专家预测,这种智能化改造将在三年内完成三个关键突破:
首先,成本门槛将大幅降低。目前整套系统的改装费用约相当于6个月的人工成本,随着技术成熟,预计到2026年将降至2个月人工成本的水平,使中小餐厅也能负担。
其次,功能将更加多元化。下一代系统正在测试整合情绪识别、营养分析等扩展功能。比如通过面部识别判断顾客对菜品的满意度,或是为健身人士计算餐食的热量摄入。
最重要的是,人机协作模式将重新定义。不再是简单的"机器替代人工",而是形成"人类处理复杂社交,机器负责标准化服务"的新分工。在上海进行的试点显示,这种人机协作模式能使服务效率提升120%,同时显著降低员工工作强度。
这场变革的终极目标,是创造真正"懂你"的服务体验。当机器人能够理解"老位置""老样子"这样充满人情味的指令,当它们能主动察觉顾客未说出口的需求时,服务业就将进入一个全新的时代。这不仅是技术的进步,更是服务理念的革新——用科技的力量,还原服务最本真的温度。