当前位置: 首页 > news >正文 langflow如何查看中间步骤的输出 news 2025/10/14 22:08:17 前言 上回咱说道,不知道怎么看langflow如何查看中间步骤的输出。 后来研究了一下,还是蛮简单的。 一个基本的工作流 鉴于现在百度的deepseek-r1开始收费了,咱整个本地的ollama哈: 运行并查看 我们在最左侧的框框里填上你好,然后,点最右边的运行按钮。 每个模块的右上角,都有了一个绿色的时间,表示它们都运行成功了。 这时,它们右下角的按钮,点开就可以查看该步骤的输出了。 查看全文 http://www.dtcms.com/a/31571.html 相关文章: 嵌入式硬件篇---数字电子技术中的时序逻辑 Unable to parse timestamp value: “20250220135445“, expected format is Elasticsearch除了用作查找以外,还能可以做什么? DAY08 List接口、Collections接口、Set接口 const 关键字在 C++ 中的应用 Cannot deserialize instance of java.lang.String out of START_ARRAY token PDN目标阻抗的局限与恶劣波评估 C++ 智能指针 unique_ptr shared_ptr weak_ptr小练习 【Java基础-49】Java线程池及其基本应用详解 强化学习的数学原理-六、随机近似与随机梯度下降 HTML之JavaScript DOM简介 Python中的闭包和装饰器 静态时序分析:时钟组间的逻辑独立、物理独立和异步的区别 Perplexity AI:通过OpenAI与DeepSeek彻底革新搜索和商业策略 过程监督(Process Supervision)融入到 GRPO (Group Relative Policy Optimization) MT7628基于原厂的SDK包, 修改ra1网卡的MAC方法。 【ORB-SLAM3】鲁棒核函数的阈值设置 docker-rss:容器更新的RSS订阅源 卷积与动态特征选择:重塑YOLOv8的多尺度目标检测能力 商汤绝影发布全新端到端自动驾驶技术路线R-UniAD 【Python爬虫(49)】分布式爬虫:在新兴技术浪潮下的蜕变与展望 从0开始:OpenCV入门教程【图像处理基础】 【网络】高级IO sklearn中的决策树 Java子类调用父类构造器的应用场景 STM32-有关内存堆栈、map文件 ROS2 应用:按键控制 MoveIt2 中 Panda 机械臂关节位置 golang内存泄漏 下载CentOS 10 探索未知:alpha测试的神秘序章【量化理论】
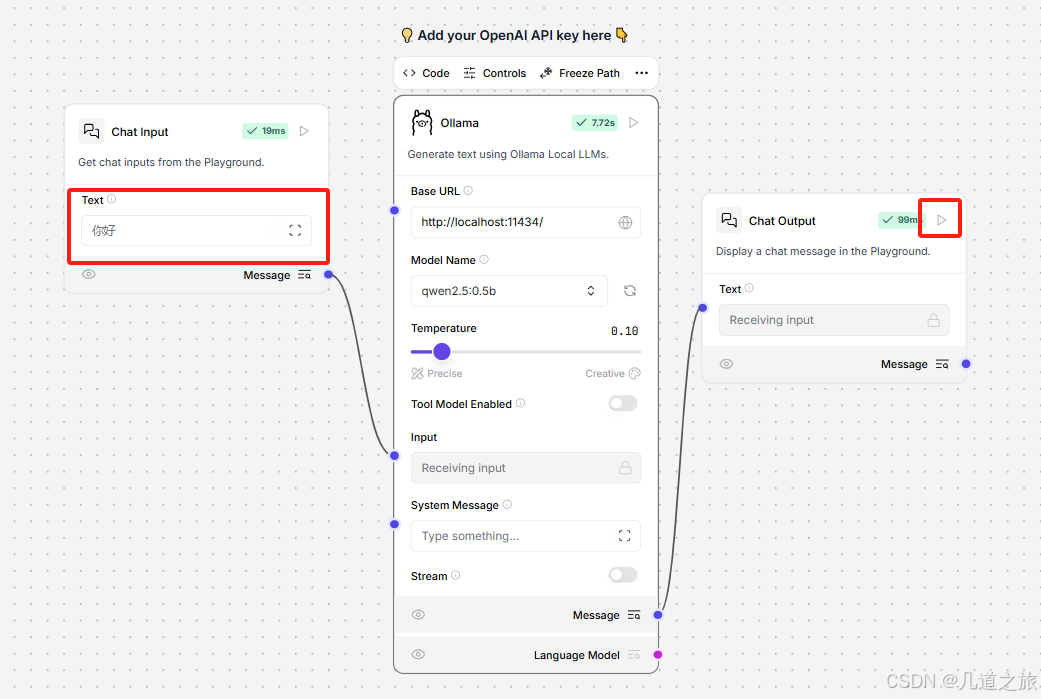
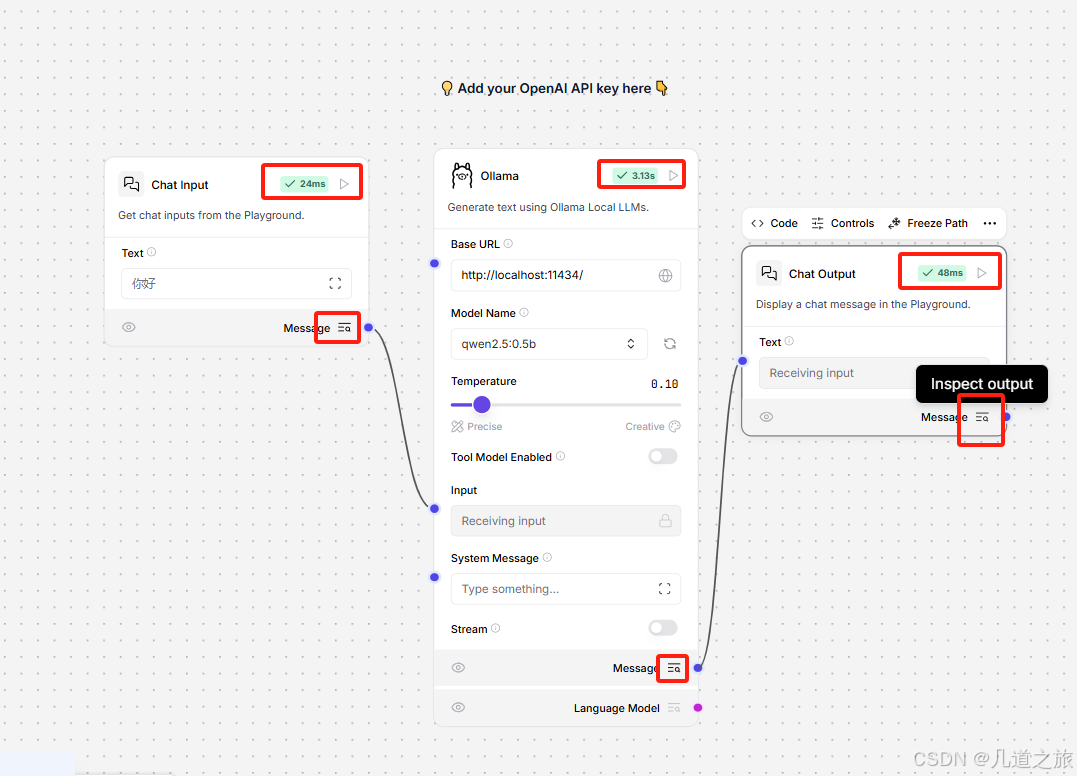
前言 上回咱说道,不知道怎么看langflow如何查看中间步骤的输出。 后来研究了一下,还是蛮简单的。 一个基本的工作流 鉴于现在百度的deepseek-r1开始收费了,咱整个本地的ollama哈: 运行并查看 我们在最左侧的框框里填上你好,然后,点最右边的运行按钮。 每个模块的右上角,都有了一个绿色的时间,表示它们都运行成功了。 这时,它们右下角的按钮,点开就可以查看该步骤的输出了。 查看全文 http://www.dtcms.com/a/31571.html 相关文章: 嵌入式硬件篇---数字电子技术中的时序逻辑 Unable to parse timestamp value: “20250220135445“, expected format is Elasticsearch除了用作查找以外,还能可以做什么? DAY08 List接口、Collections接口、Set接口 const 关键字在 C++ 中的应用 Cannot deserialize instance of java.lang.String out of START_ARRAY token PDN目标阻抗的局限与恶劣波评估 C++ 智能指针 unique_ptr shared_ptr weak_ptr小练习 【Java基础-49】Java线程池及其基本应用详解 强化学习的数学原理-六、随机近似与随机梯度下降 HTML之JavaScript DOM简介 Python中的闭包和装饰器 静态时序分析:时钟组间的逻辑独立、物理独立和异步的区别 Perplexity AI:通过OpenAI与DeepSeek彻底革新搜索和商业策略 过程监督(Process Supervision)融入到 GRPO (Group Relative Policy Optimization) MT7628基于原厂的SDK包, 修改ra1网卡的MAC方法。 【ORB-SLAM3】鲁棒核函数的阈值设置 docker-rss:容器更新的RSS订阅源 卷积与动态特征选择:重塑YOLOv8的多尺度目标检测能力 商汤绝影发布全新端到端自动驾驶技术路线R-UniAD 【Python爬虫(49)】分布式爬虫:在新兴技术浪潮下的蜕变与展望 从0开始:OpenCV入门教程【图像处理基础】 【网络】高级IO sklearn中的决策树 Java子类调用父类构造器的应用场景 STM32-有关内存堆栈、map文件 ROS2 应用:按键控制 MoveIt2 中 Panda 机械臂关节位置 golang内存泄漏 下载CentOS 10 探索未知:alpha测试的神秘序章【量化理论】