MiDSS复现
表1
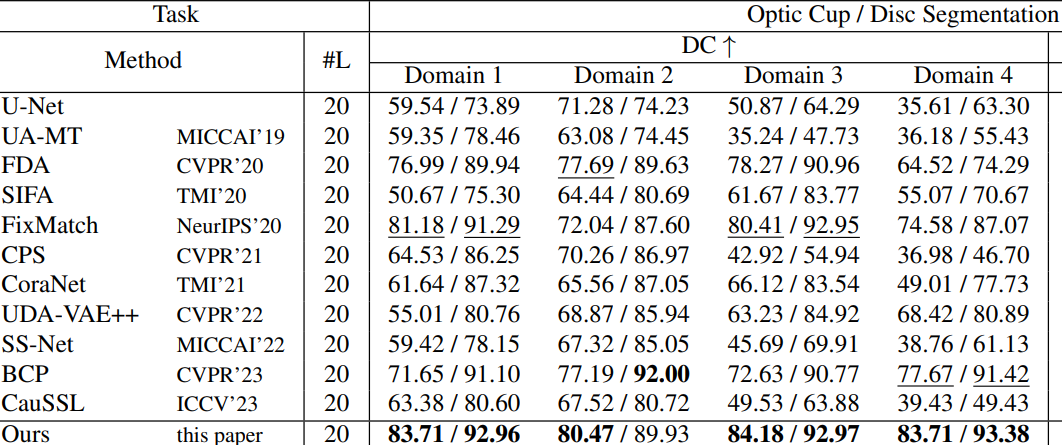
复现结果–Domain 1:84.5772/92.8173 Domain 2:76.5257/89.8089 Domain 3:83.3591/93.3589 Domain 4:83.5379/92.6869,Domain 2的Optic Cup分割差了3个点,怎么回事捏
表2
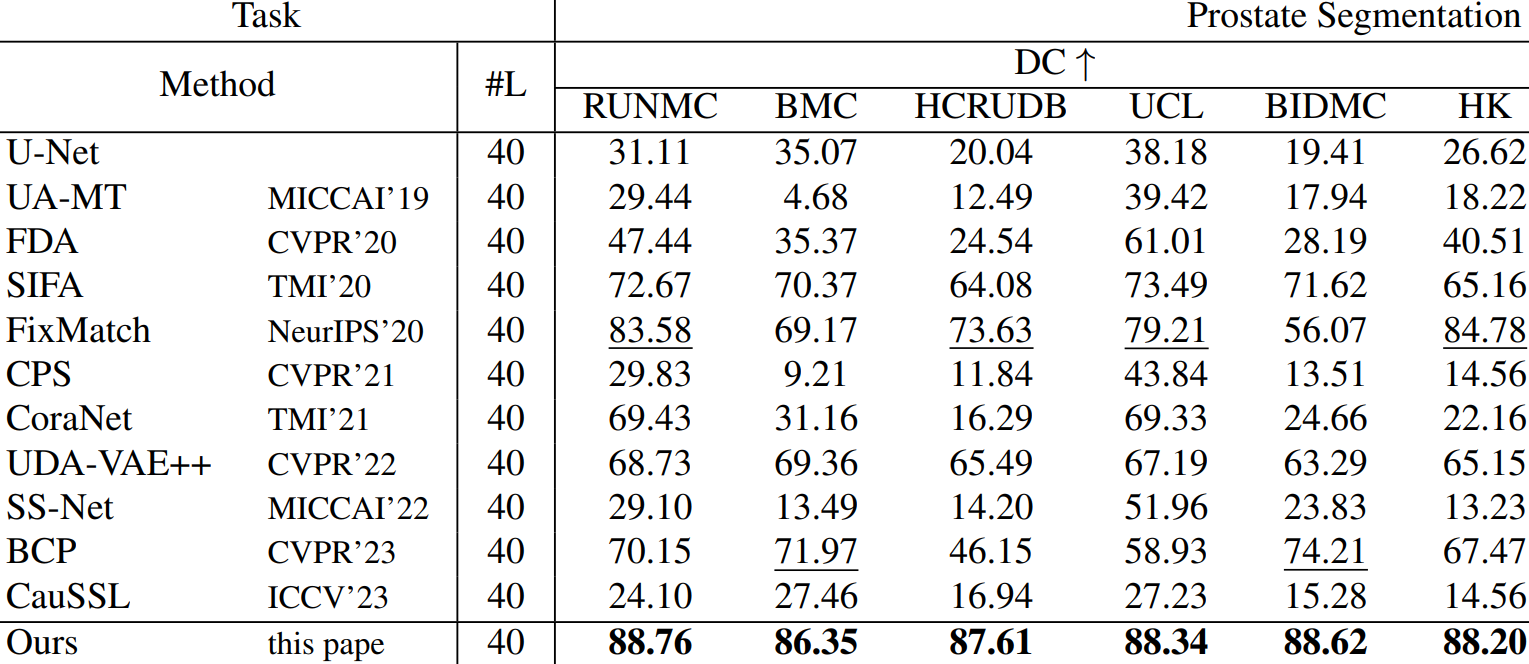
复现结果–RUNMC:87.3955 BMC:85.8248 HCRUDB:86.9536 UCL:87.8743 BIDMC:87.9244,HK:88.2871,误差在接受范围
表3
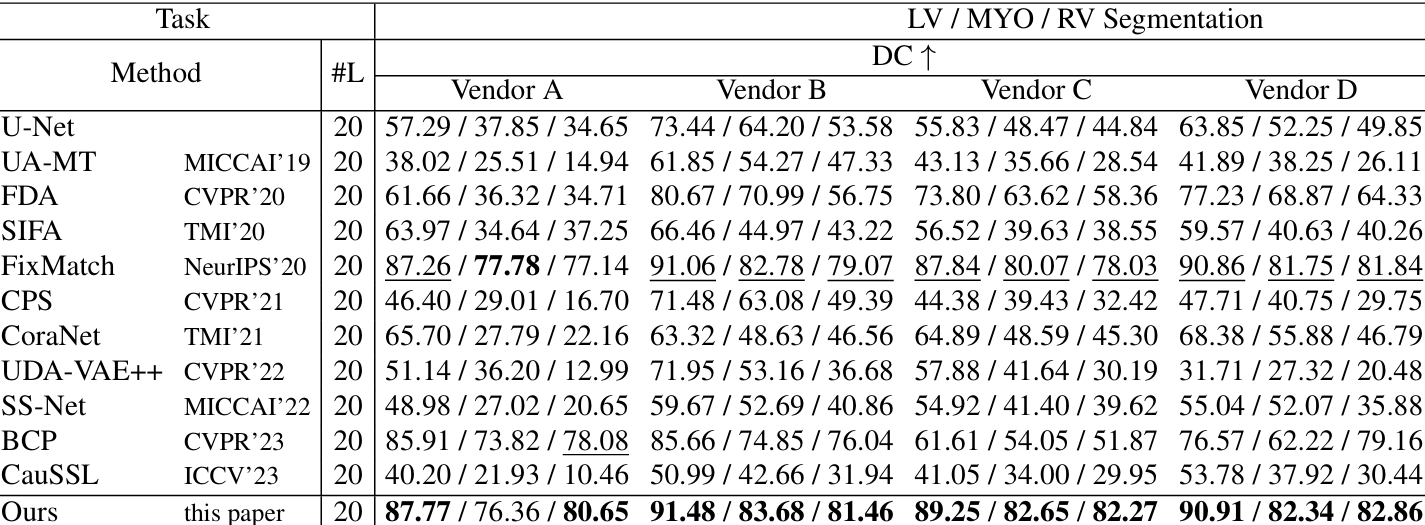
复现结果–Vendor A:87.5468/—/80.4991 Vendor B:91.7505/83.8207/81.5625 Vendor C:88.8809/82.5476/82.3167 Vendor D:91.2711/82.5307/82.9513 误差在接受范围
感想
第21篇完全复现的论文