自动驾驶中的传感器技术22——Camera(13)
1、可靠性验证的目标
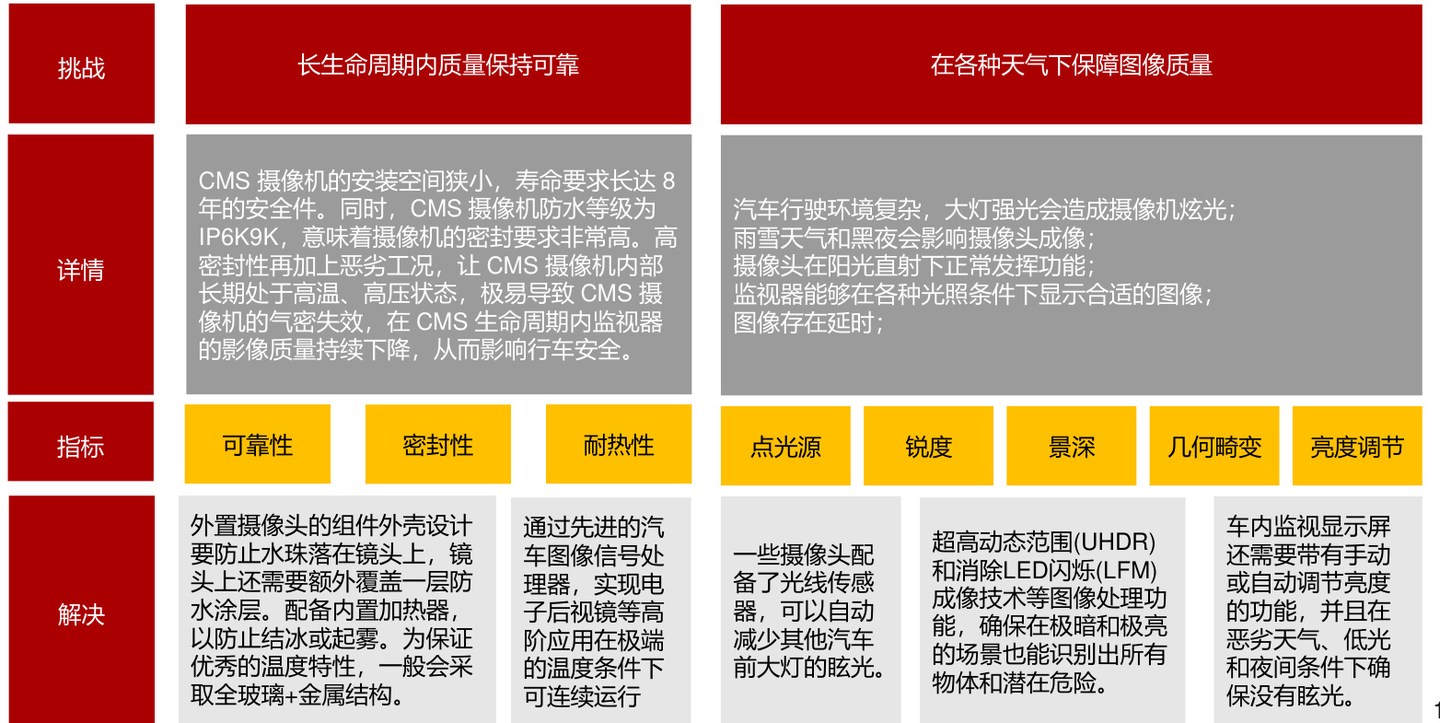
车载摄像头作为自动驾驶和高级驾驶辅助系统(ADAS)的核心传感器,其可靠性直接影响到行车安全。
可靠性验证的目标如下:
暴露产品缺陷:在研制阶段,通过测试发现并修正产品设计中的问题,确保其符合预期的性能指标。
监控生产过程:在生产阶段,通过测试评估产品的一致性和稳定性,确保每一批次产品都符合质量标准。
产品鉴定与验收:对定型产品进行可靠性鉴定或验收,确保其满足行业标准和用户需求。
分析失效规律:通过测试研究产品在不同环境和应力条件下的失效模式和机理,为改进产品设计提供依据。
提供选型依据:为消费者和企业选择合适的产品提供科学依据,确保其在实际使用中能够稳定运行。
2、验证方法
1. 硬件测试
硬件测试是验证车载摄像头可靠性的重要组成部分,主要包括以下几个方面:
外观与结构测试:检查摄像头是否有划痕、裂纹或其他缺陷,确保其结构稳固,能够承受车辆行驶过程中的震动和冲击。
视角与分辨率测试:测试摄像头的视角是否覆盖车辆前方的道路情况,分辨率是否清晰,能够准确捕捉行车过程中的细节。
防水与抗震测试:通过模拟雨天、风沙、颠簸等恶劣环境,测试摄像头的防水性能和抗震能力,确保其在极端条件下仍能正常工作。
耐温测试:测试摄像头在不同温度范围内的表现,确保其在-40℃至85℃的极端温度下仍能稳定运行。
IPX9K防水等级测试:通过80℃高压水枪喷射试验,确保镜头前端不会进水,满足IP68级别的防水要求。
2. 软件测试
软件测试主要关注摄像头的功能实现和性能表现,包括:
录像与存储功能测试:测试摄像头是否能正常录制视频,并将文件保存到指定的存储介质中。
回放与车牌识别测试:测试摄像头是否能准确回放之前录制的画面,并识别车牌号码。
夜视功能测试:在黑暗环境中测试摄像头的成像效果,确保其在夜间或低光条件下仍能清晰呈现物体轮廓。
动态捕捉与色彩还原测试:测试摄像头在强光、弱光、动态场景下的表现,确保其能够准确还原图像的色彩和细节。
3. 环境耐候性测试
环境耐候性测试是验证车载摄像头在复杂环境下的稳定性的重要手段,主要包括:
高低温循环测试:模拟极端温度变化,测试摄像头在高温和低温环境下的性能。
湿热循环与盐雾腐蚀测试:测试摄像头在潮湿、高盐雾环境下的耐腐蚀能力。
冰水冲击与紫外线照射测试:测试摄像头在冰水冲击和长期紫外线照射下的性能。
耐振动与冲击测试:通过机械振动台、加速度冲击试验台等设备,测试摄像头在车辆行驶过程中的抗振能力。
4. 电磁兼容性测试
电磁兼容性测试是确保车载摄像头在电磁干扰环境下仍能正常工作的关键步骤。测试内容包括:
静电放电抗扰度测试:测试摄像头在静电放电环境下的稳定性。
传导和耦合引起的电骚扰抗扰测试:测试摄像头在电磁干扰下的抗干扰能力。
电磁辐射抗扰测试:测试摄像头在电磁辐射环境下的正常运行能力。
5. 功能测试
功能测试是验证车载摄像头在实际使用中的表现,主要包括:
碰撞检测测试:模拟碰撞场景,测试摄像头是否能迅速反应并发送警报,为驾乘人员争取应对时间。
停车监控测试:测试摄像头在车辆静止时是否能正确监控周围环境,记录任何细微变化。
全景摄像测试:测试摄像头捕捉全景画面的能力,确保驾驶员获得全面视野。
3、可靠性保障方法
1. 硬件设计与制造标准
车载摄像头的可靠性首先体现在其硬件设计和制造过程中。为了确保其在复杂环境下的稳定运行,必须采用符合行业标准的高质量材料和工艺。
材料选择:汉高等供应商为车载摄像头开发了定制化的高可靠性材料解决方案,包括螺纹锁固胶、固晶胶、导电胶、焊接材料等,这些材料能够确保摄像头在极端温度(-40℃至85℃)和恶劣环境下的可靠性。
防水防尘设计:车载摄像头通常需要具备IP68级别的防水防尘能力,以防止雨水、雪水、泥浆等进入摄像头内部,影响图像质量。例如,通过密封外壳、防水涂层和排水通道等设计,可以有效防止水分侵入。
防震抗震设计:车载摄像头在行驶过程中会受到颠簸和震动的影响,因此需要具备良好的防震性能。通过结构设计和材料选择,可以确保摄像头在颠簸路面上保持稳定的图像输出。
2. 软件与图像处理技术
软件和图像处理技术是保障车载摄像头清晰度和可靠性的关键因素之一。通过先进的算法和图像处理技术,可以提升摄像头在不同环境下的成像质量。
图像处理算法:现代车载摄像头通常配备AI算法,能够智能调整画面清晰度、色彩还原度,并适应夜间或动态场景。例如,美摄科技的方案通过AI算法实现了智能调整画面清晰度和色彩还原度。
夜视功能:在低照度或黑暗环境下,车载摄像头需要具备夜视功能,以确保能够清晰捕捉物体轮廓。通过高动态范围(HDR)和LED闪烁抑制(LFM)等技术,可以有效提升暗光条件下的成像效果。
图像质量评估:在不同光线条件下,摄像头的画质、色彩还原和噪点情况需要进行评估。例如,通过拍摄固定图形视频并比较与预设图像的相似度,可以评估摄像头的图像质量。
3. 环境适应性测试
为了确保车载摄像头在各种环境下的可靠性,必须进行严格的环境适应性测试。
温度测试:车载摄像头需要在-40℃至85℃的温度范围内持续工作,以适应极端寒冷和炎热的环境。通过温度循环测试,可以验证摄像头在不同温度下的稳定性和耐用性。
防水测试:通过IP68防水测试,可以验证摄像头在水压和湿度条件下的可靠性,确保其在雨天、雪天等恶劣天气下仍能正常工作。
防磁测试:车辆启动时会产生极高的电磁脉冲,因此车载摄像头需要具备防磁性能,以防止电磁干扰影响图像质量。
震动测试:通过震动测试,可以评估摄像头在颠簸路面上的稳定性,确保其在行驶过程中不会因震动而松动或损坏。
4. 安装与维护
正确的安装和定期维护也是保障车载摄像头可靠性的关键因素。
安装位置:摄像头的安装位置应选择在车内后视镜附近,以确保前后区域的覆盖范围。同时,安装时应使用小螺丝固定摄像头,调整视角,确保其稳固性。
清洁与保养:定期清洁摄像头镜头,避免使用化学物质或硬物刮伤表面。如果摄像头进水,应及时拆下并彻底吹干,必要时可送专业维修点进行检查或更换。
参数调整:通过车辆信息娱乐系统或专业工具调整摄像头参数,确保其在不同光照条件下都能提供清晰的图像。
定期检测:建议定期对车载摄像头进行气密性检测,以确保其在各种环境下的稳定性和可靠性。
5. 功能安全与网络安全
随着自动驾驶技术的发展,车载摄像头的功能安全和网络安全也变得尤为重要。
功能安全:根据ISO 26262标准,车载摄像头需要符合相应的汽车安全完整性等级(ASIL),以确保其在自动驾驶系统中的可靠性。
网络安全:车载摄像头需要具备网络安全机制,以防止黑客侵袭,确保系统的安全性和可靠性。