LQR个人笔记
1.最优控制算法
2.优缺点:
(1)必须是线性时不变模型(2)是多输入多输出的,是使用了状态空间方程的模型,相比于PID的优点(3)最小代价函数可以计算出能量最优的方式使得系统稳定下来(4)需要实时的计算相应的矩阵:状态反馈矩阵和控制增益
3.深入原理:
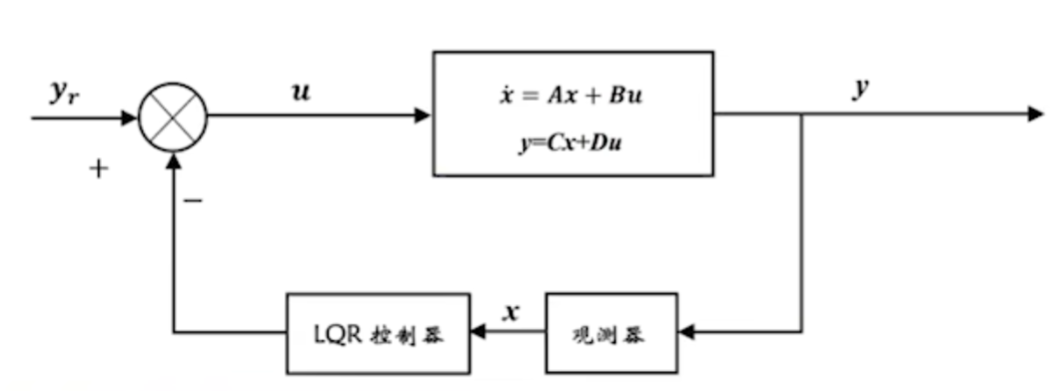
(1)相比于PID的输出反馈,他是状态反馈控制,回顾之前信号与系统学的系统框图内容,对于输入u输出y的描述往往会引入x即状态变量进行描述。而LQR就是使用x进行反馈回到u里面而不是直接用y反馈到u。然后由于引入了反馈,u可以用x表示。所以原先的状态方程可以改写成只有x,y两个量。而且可以多状态反馈
(2)反馈量-K里的K也叫增益矩阵,u=-Kx
(3)代价函数J: ,Q和R是权重矩阵,
,Q和R是权重矩阵, Q 必须是半正定矩阵,即所有对角元素 q_ii 必须大于等于零, R 必须是正定矩阵,正定性要求所有对角元素 r_kk 必须严格大于零。非对角元素可负表示状态分量间的特殊耦合惩罚,一般忽略即设为0。增大对于x的权重会使得收敛速度更快,LQR就是为了使得J最小,且由于QR的正定性会使得带来的一定是非负的惩罚,J大于等于0。
(4)黎卡提方程:用于在J的基础上求出K
(5)观测器的作用:显然用lqr需要每个x状态变量,但是有些状态变量不能直接从传感器读出,如果要通过微分积分得到噪声会很大,所以需要观测器去估计
4.matlab:
(1)tf2ss:将传递函数转化成状态方程,或者直接写出来
(2)手动配置QR权重,Q看阶数,即s是几次方,R看u的维度
(3)调用lqr函数得到K
(4)仿真时可以用卡尔曼观察器,好像还有极点配置法可能出反馈量需要的x。
(5)调参:K是根据代价函数来的因此QR配置很关键,基于对于权重越大收敛越快(趋于0),所以增大R了,u更快的变小,输入变小了,响应的时间也会变长,意味着使用大的控制量成本越高,控制器会更倾向于使用较小的控制输入。至于Q的作用就是人对应趋于01,有说法称为原点x=0,Q越大越快拉回原点。
5.最后现象:
由于引入反馈:y = Cx + D(-Kx) = (C - DK)x。矩阵 (𝐶−𝐷𝐾)(C−DK) 决定哪些状态分量对输出影响更大(例如传感器测量位置),但无法改变系统固有动态(极点)。
原先开环增益A(s)也会变成闭环增益G(s)因此K还会影响闭环系统的极点,通常配置为左半平面
,由闭环状态方程:x(t)=Ax(t)+B(−Kx(t))=(A−BK)x(t),极点是A−BK的特征值
上面的讲述大致就是网络上常见的概念了,但是还是太浅了,远远没到应用的地步,因此再作补充:
1.通常情况下我们接触到的都是开环系统,如果输入油门,偏航,得到位置,角度等,像这样的多输入多输出系统。这种开环系统显然我们可以得到其状态方程和输出方程。这就是前文提到的第一步,ABCD矩阵的由来
2.这个时候往往会发现运动很飘很不丝滑或者达不到想要的效果,所以引入闭环控制改善系统增益函数变成闭环增益。
3.对于多变量系统的稳定性,LQR首先把输入置为0了。再去引入反馈,这个时候输入完全由反馈量x决定也就是u=-Kx。再进行后续一系列推导,使得u,x,y均稳定,且把稳定的设置0点,即J非负还要最小的原因,LQR是专注与系统稳定的算法。标准的LQR是不允许输入其他信号的。
4.想要输出非0的y怎么办?引入输出反馈控制,使得u变为=-Kx+新反馈量比如误差积分。其实只要改变u=-Kx就好,另外如果引入的反馈量不涉及状态变量,A-BK的极点稳定性是会保留的,这就是为什么LQR可以用来稳定PID。
5.显然引入了新输入后,x,u将会不再稳定在0点。