opencv自定义滤波
目录
1. 自定义滤波的基本原理
2. OpenCV 中实现自定义滤波的主要函数
3. 自定义卷积核的创建
4.完整代码示例
5. 边界处理方式
6. 注意事项
7. 高级应用:自定义非线性滤波
OpenCV 中的自定义滤波是通过卷积操作实现的强大功能,允许用户创建特定的卷积核(Kernel)来实现各种图像处理效果。下面详细介绍其原理、实现方法和应用场景。
1. 自定义滤波的基本原理
自定义滤波的核心是卷积操作 :
A、将一个自定义的卷积核(通常是小矩阵)滑过图像的每个像素
B、对每个位置,计算卷积核与对应图像区域的元素乘积之和
C、结果作为输出图像对应位置的像素值
2. OpenCV 中实现自定义滤波的主要函数
OpenCV 提供 cv::filter2D 函数实现自定义滤波:
void filter2D(InputArray src, OutputArray dst, int ddepth,InputArray kernel, Point anchor = Point(-1,-1),double delta = 0, int borderType = BORDER_DEFAULT);参数说明:
- src :输入图像
- dst :输出图像
- ddepth :输出图像的深度(-1 表示与输入图像相同)
- kernel :卷积核(单通道浮点矩阵)
- anchor :锚点位置(默认 (-1,-1) 表示核中心)
- delta :可选的偏移值,加到卷积结果上
- borderType :边界处理方式
3. 自定义卷积核的创建
卷积核是自定义滤波的关键,以下是几种常用类型:
3.1 锐化核
增强图像边缘和细节:
// 3x3 锐化核
Mat kernel = (Mat_<float>(3, 3) <<0, -1, 0,-1, 5, -1,0, -1, 0); 3.2 模糊核
降低图像噪声或细节:
// 3x3 均值模糊核
Mat kernel = (Mat_<float>(3, 3) <<1/9.0, 1/9.0, 1/9.0,1/9.0, 1/9.0, 1/9.0,1/9.0, 1/9.0, 1/9.0);3.4 边缘检测核
// 3x3 Sobel 水平边缘检测核
Mat kernel = (Mat_<float>(3, 3) <<-1, -2, -1,0, 0, 0,1, 2, 1);4.完整代码示例
#include <opencv2/opencv.hpp>
#include <iostream>using namespace cv;
using namespace std;int main()
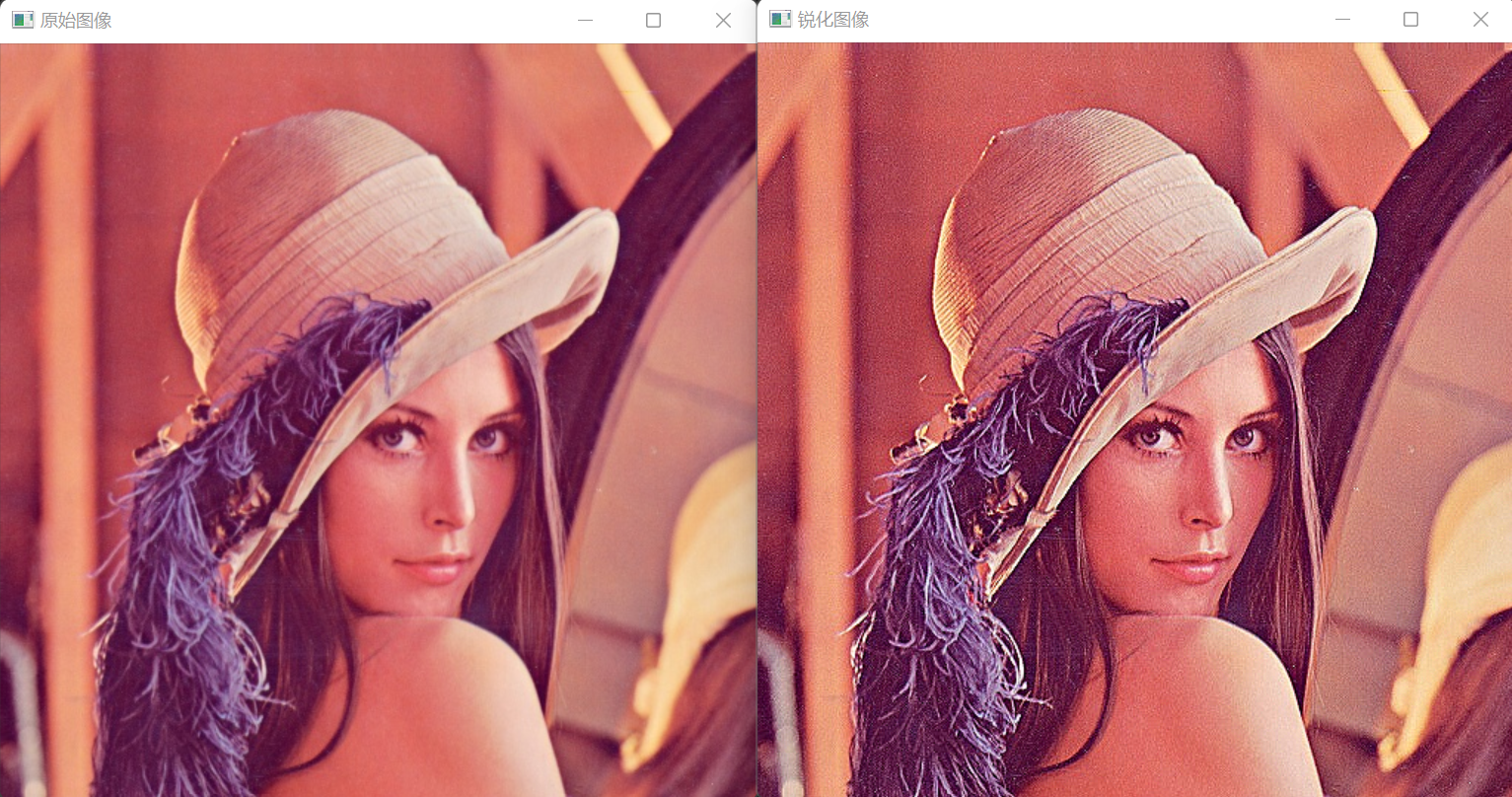
{// 读取图像Mat image = imread("lena.jpg");if (image.empty()) {cout << "无法读取图像" << endl;return -1;}// 创建自定义锐化核Mat kernel = (Mat_<float>(3, 3) <<0, -1, 0,-1, 5, -1,0, -1, 0);// 应用自定义滤波Mat sharpened;filter2D(image, sharpened, -1, kernel, Point(-1, -1), 0, BORDER_DEFAULT);// 显示结果imshow("原始图像", image);imshow("锐化图像", sharpened);waitKey(0);return 0;
}处理结果:
5. 边界处理方式
OpenCV 提供多种边界处理策略:
- BORDER_CONSTANT :用常量填充边界(默认 0)
- BORDER_REPLICATE :复制边缘像素
- BORDER_REFLECT :反射边界像素(如 abcdef → fedcba)
- BORDER_WRAP :环绕边界(如 abcdef → cdefab)
6. 注意事项
1. 卷积核大小通常为 奇数 (如 3x3, 5x5),以便有明确的中心锚点
2. 对于多通道图像(如 RGB),卷积核会应用于每个通道
3. 卷积操作可能导致像素值超出 [0, 255] 范围,需要使用 cv::convertScaleAbs 确保结果有效
4. 复杂的自定义滤波可能会降低性能,可以考虑使用分离卷积(如高斯模糊)
7. 高级应用:自定义非线性滤波
对于更复杂的需求,可以使用 cv::filter2D 的扩展或自定义函数:
- 中值滤波 : cv::medianBlur (对椒盐噪声效果好)
- 双边滤波 : cv::bilateralFilter (保持边缘的同时降噪)
- 自定义非线性滤波 :通过 cv::erode 、 cv::dilate 等函数组合实现
通过灵活设计卷积核,自定义滤波可以实现从简单模糊到复杂边缘检测的各种图像处理效果,是OpenCV中最强大的功能之一。