无人机模式的切换
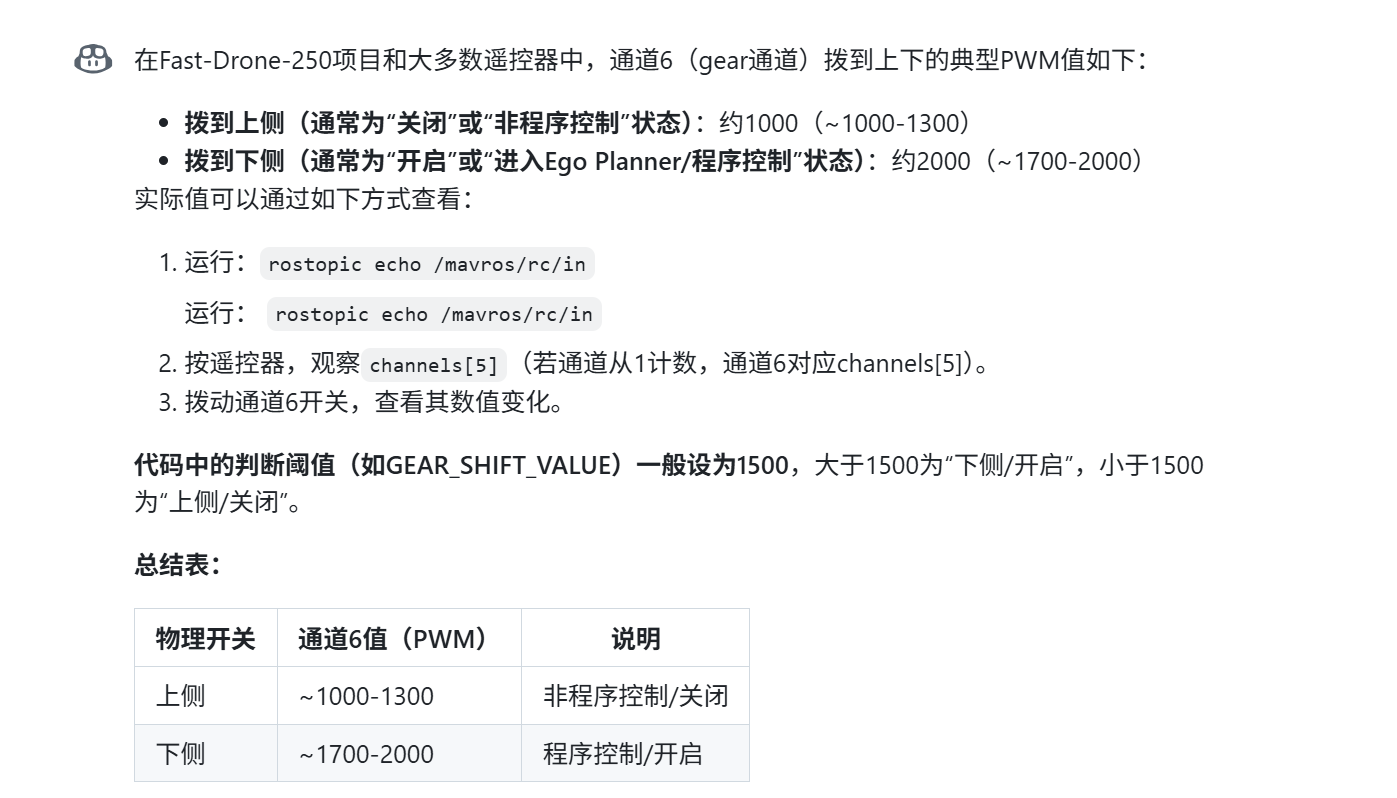
6通道拨下,且收到了轨迹命令(如Ego-Planner发布的轨迹),则进入“CMD_CTRL”状态,飞机切到OFFBOARD模式,由Ego-Planner控制。
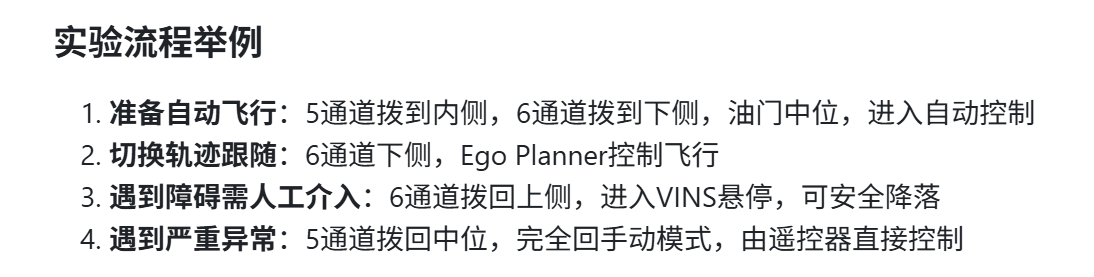
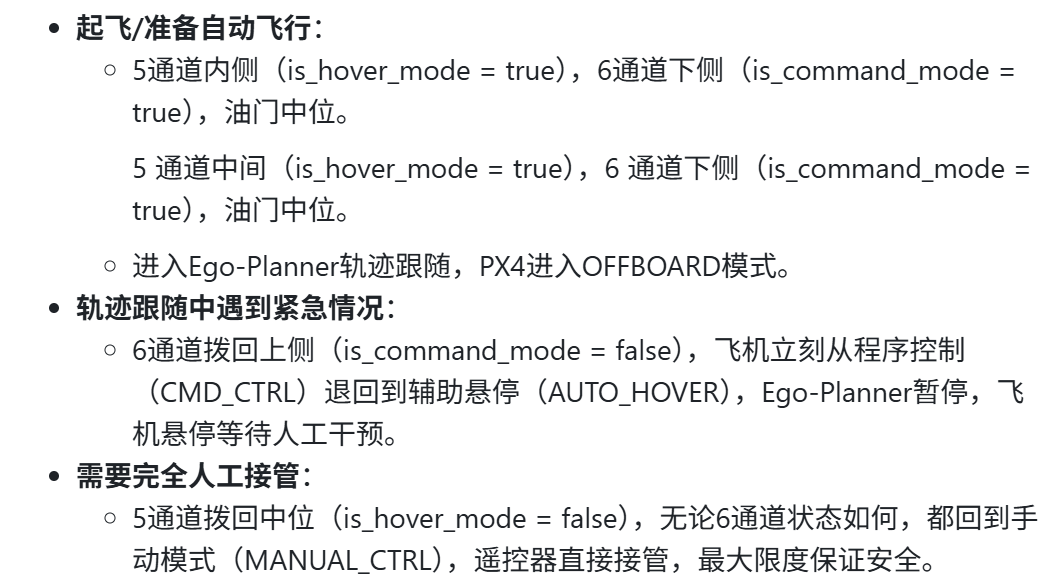
轨迹跟随中遇到紧急情况:
6通道拨回上侧(is_command_mode = false),飞机立刻从程序控制(CMD_CTRL)退回到辅助悬停(AUTO_HOVER),Ego-Planner暂停,飞机悬停等待人工干预。
如果你在Ego-Planner模式下,5通道和6通道状态正确,并且Ego-Planner上位机已经下发了有效轨迹指令,则无人机会进入到CMD_CTRL模式。
否则,只会停留在AUTO_HOVER(悬停)或MANUAL_CTRL(手动)模式。