东芝时钟控制的双极步进电机驱动器TB67S209FTG
时钟输入控制的双极步进电机驱动器主要应用于需要高精度控制的领域,如打印机、扫描仪,用于控制打印头和扫描头的精确移动2 3。在数控机床、机器人、自动化装配线等自动化设备中也有广泛应用,能实现设备的高精度定位和运动控制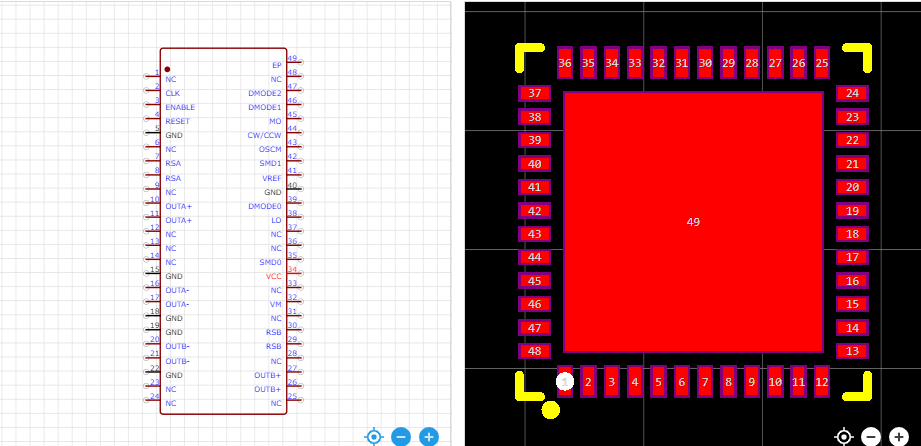
特点
・ 集成了BiCD工艺的单片集成电路。
・ 能够控制1个双极步进电机。
・ PWM控制的恒流驱动。
・ 支持全步、半步(a)(b)、四分之一步、八分之一步、十六分之一步和三十二分之一步操作。
・ 低导通电阻(高侧+低侧=0.49Ω(典型值))MOSFET输出级。
・ 可选择的混合衰减模式。
・ 高电压和大电流(具体规格请参考绝对最大额定值和操作范围)。
・ 内置错误检测(TSD/ISD)信号输出功能。
・ 内置错误检测电路(热关断(TSD)、过流关断(ISD)和欠压锁定(UVLO))。
・ 内置用于内部电路的VCC稳压器。
・ 通过外部电阻和电容可以自定义电机的斩波频率。
・ TB67S209FTG: P-WQFN48-0707-0.50-003
注意:使用过程中请注意热条件。
此外,还适用于医疗设备,如CT机、X光机等,可保证设备运动的精确性,提升检查结果的准确性
TB67S209FTG是一款采用PWM斩波器的两相双极步进电机驱动器。内置时钟解码器。采用BiCD工艺制造,额定电压为50V/4.0A。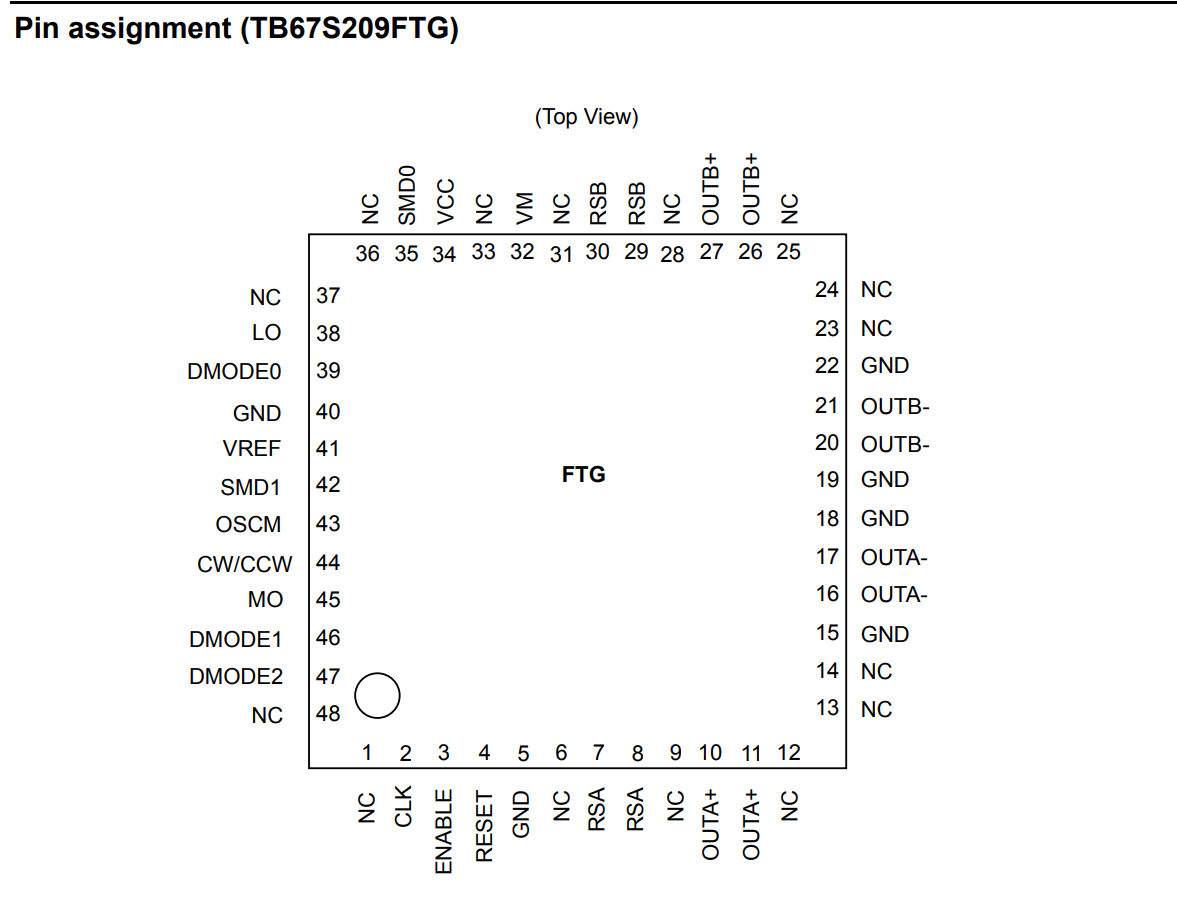
TB67S209FTG单片集成电路的性能参数如下:
电源电压:额定电压为50V,工作电压范围一般在4.75V - 50V之间
输出电流:绝对最大额定电流为4A,典型工作电流可根据负载和驱动要求设置,通过内部电路可进行电流控制和调节
步进分辨率:支持全步、半步、四分之一步、八分之一步、十六分之一步和三十二分之一步操作
导通电阻:高侧+低侧导通电阻典型值为0.49Ω
开关特性:上升时间tr为30 - 130ns,下降时间tf为40 - 140ns
振荡频率:内部振荡频率fOSCM在952 - 1288kHz之间,可通过外部电阻和电容定制斩波频率fchop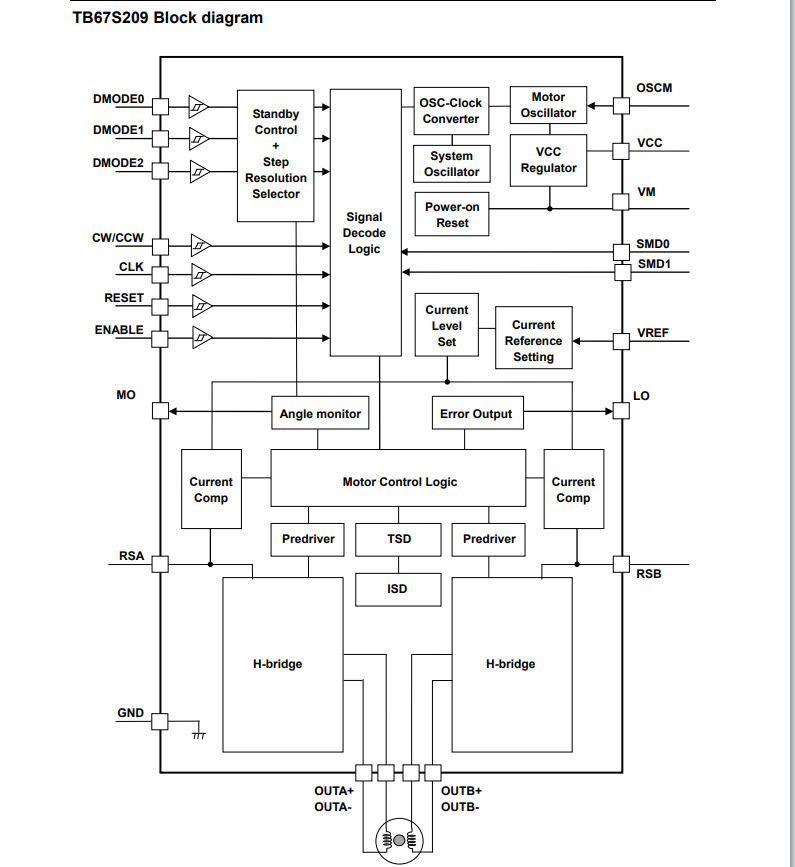 应用说明
应用说明
TB67S209FTG的所有接地线必须走PCB上的焊锡掩模,并且只在一点外部终止。同时,应考虑一种接地方法以实现有效的散热。
应仔细注意输出、VM和GND走线的布局,以避免输出引脚之间或到电源或地的短路。如果发生此类短路,设备可能会被永久损坏。
此外,对于该设备的图案设计和实现应给予极大的关注,因为它有电源引脚(VM、RS、OUT、GND),通过这些引脚可能会流过特别大的电流。如果这些引脚接线错误,可能会发生操作错误或设备被破坏。
逻辑输入引脚也必须正确接线。否则,由于通过IC的电流大于指定电流,设备可能会被损坏。