isasssim robotiq夹爪踩坑
1. usd导出urdf失败
在isasssim的仿真中的 robotiq 2f夹爪,首先目前4.5asset里面的usd不能直接转urdf,因为模型中存在 “闭环连接”,即某个部件(或关节)同时与两个及以上的父部件相连,形成类似 “三角形” 的循环结构
即usd导出urdf失败
2. 夹爪不动,夹爪散架
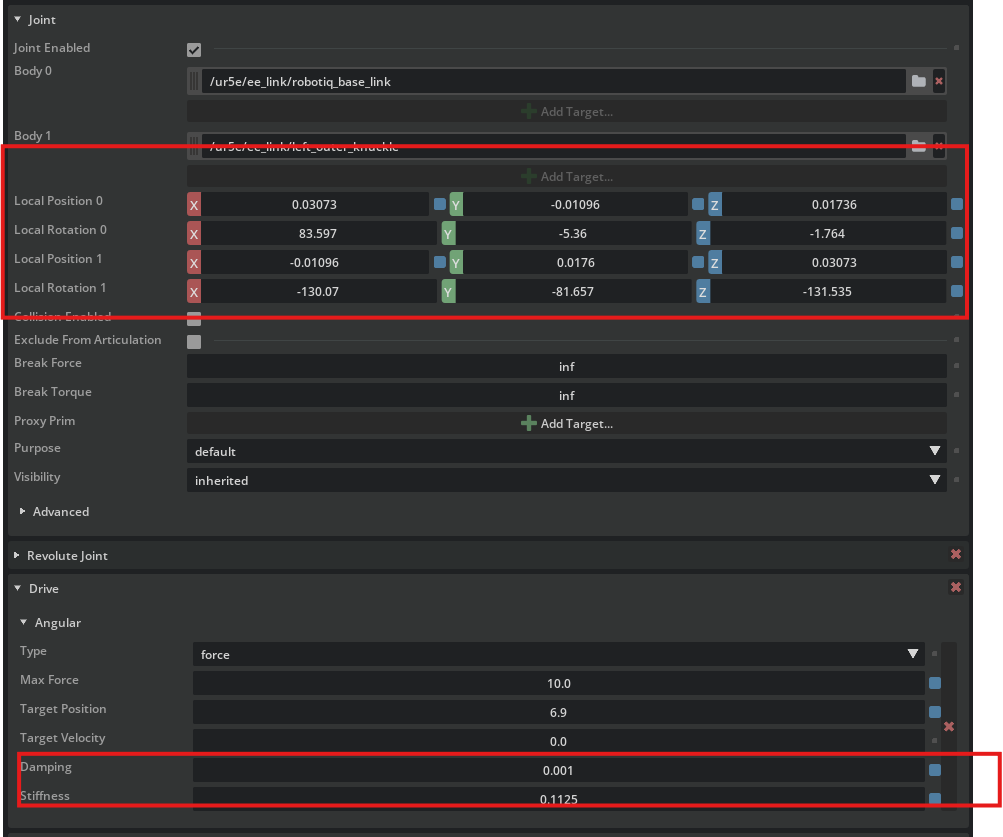
修改了drive的pd参数,导致夹爪不动
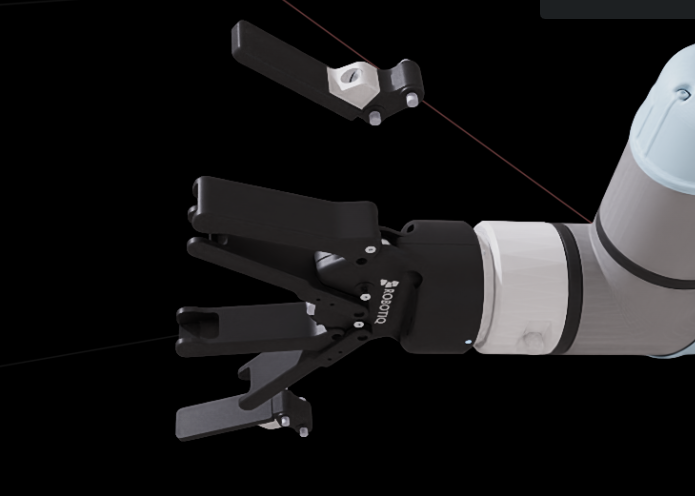
修改了夹爪内部的位置关系,导致散架(很可能,无法修复了,只能用原版覆盖了
在isasssim的仿真中的 robotiq 2f夹爪,首先目前4.5asset里面的usd不能直接转urdf,因为模型中存在 “闭环连接”,即某个部件(或关节)同时与两个及以上的父部件相连,形成类似 “三角形” 的循环结构
即usd导出urdf失败
修改了drive的pd参数,导致夹爪不动
修改了夹爪内部的位置关系,导致散架(很可能,无法修复了,只能用原版覆盖了