ros的rqt工具箱的使用(持续更新)
目录
前言:
1.rqt_plot
(1)在命令行输如rqt。
(2)如下图,找到rqt_plot
(3)选择话题
(4)同时显示多条曲线
(5)其他的操作
前言:
在调节无人机的内环的pid的时候,需要查看对角速度的跟随的效果,所以需要可视化期望角速度和当前角速度,但是我又不想写一个结点来订阅ros的话题,之后实时绘图,所以想到使用rqt_plot的功能,最后实际上失败了。但是记录一下rqt_plot的用途。
1.rqt_plot
(1)在命令行输如rqt。
rqt
(2)如下图,找到rqt_plot
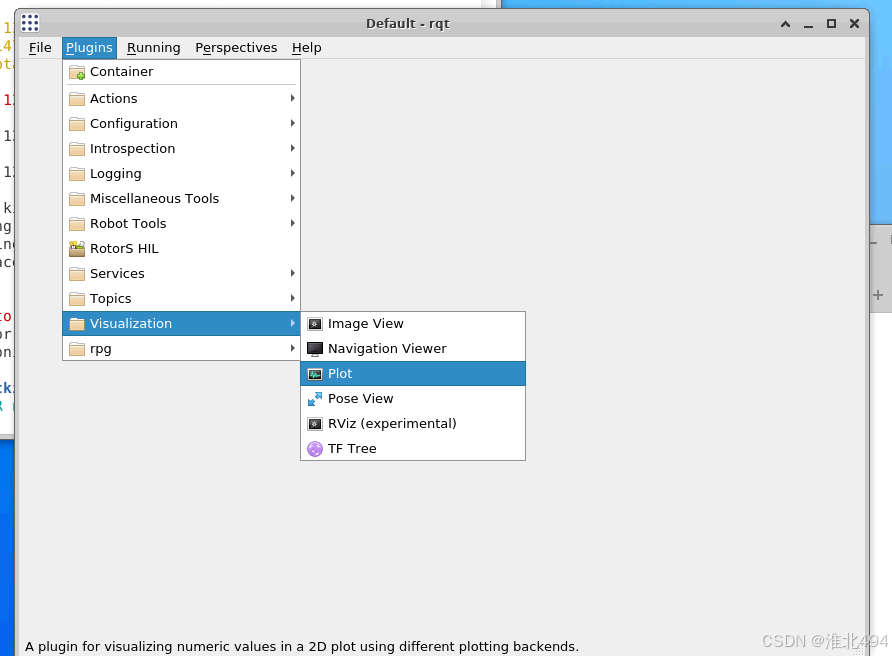
(3)选择话题
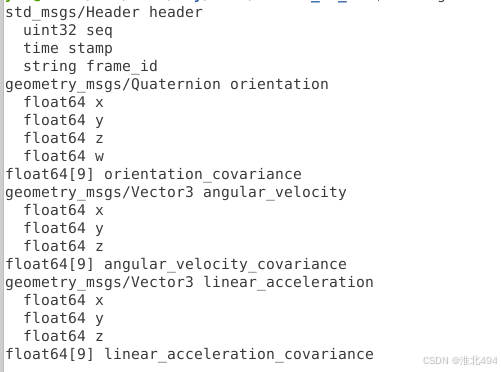
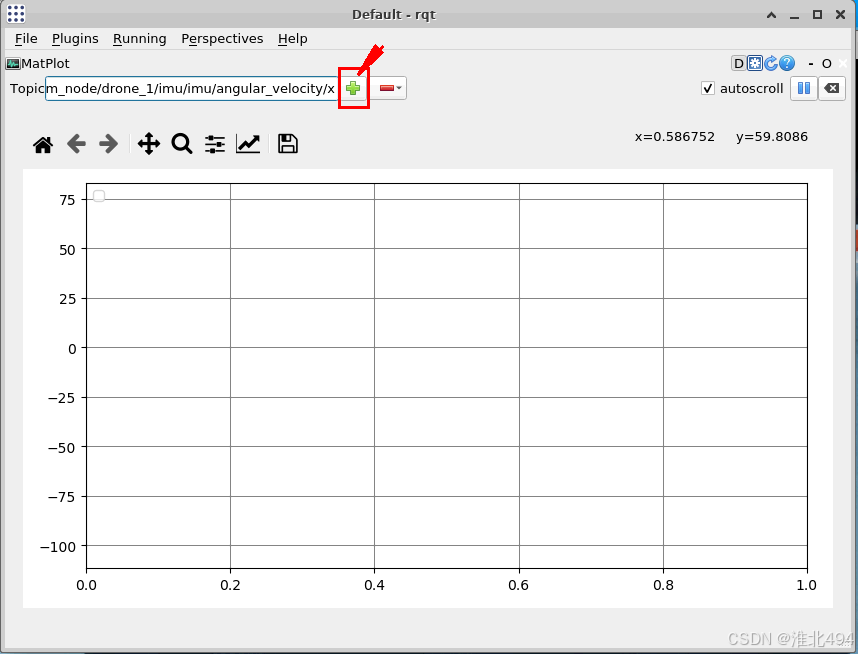
对于一个话题如:/airsim_node/drone_1/imu/imu,它的数据类型是sensor_msgs/Imu,sensor_msgs/Imu具体如下。之后如果想要实时的可视化这个的angular_velocity中的x。那么应该在下面第二个窗口中输入的内容应该是:
/airsim_node/drone_1/imu/imu/angular_velocity/x可以成功识别那就会有个绿色的加号,不能成功识别,那么就是一个灰色的加号。
(4)同时显示多条曲线
注意:同时显示多条曲线只适用于同一个话题,如果想要在一个窗口可视化不同话题的不同数据,就会后面的覆盖前面的。
如可视化/airsim_node/drone_1/gps话题,数据类型geometry_msgs/PoseStamped。
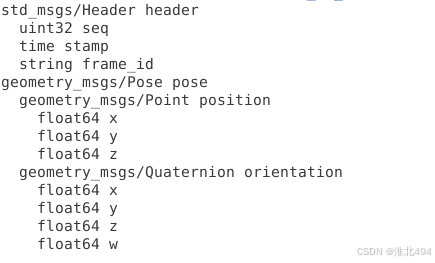
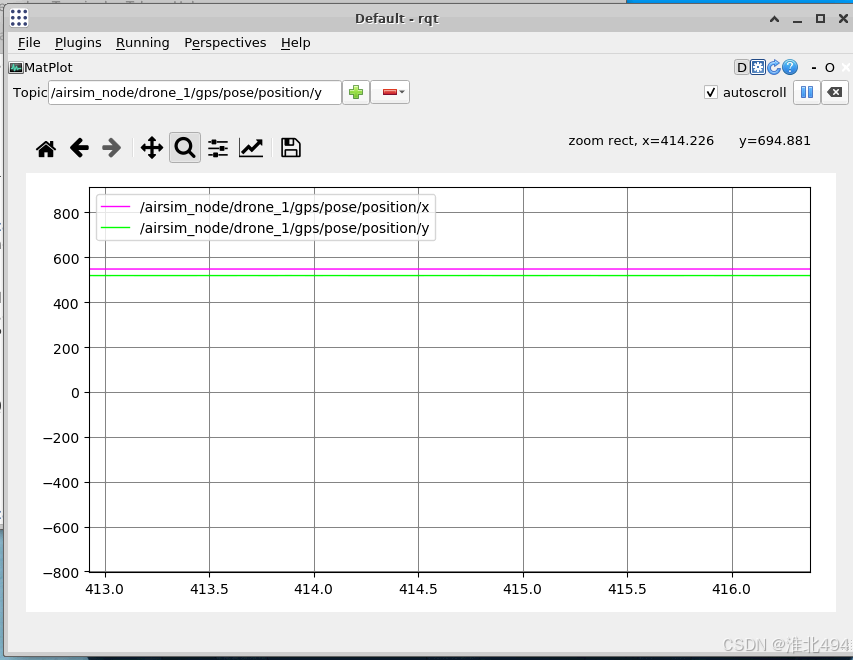
我想要同时可视化position_x 和 position_y。那么我需要输入
/airsim_node/drone_1/gps/pose/position/x
# 点击绿色的加号
/airsim_node/drone_1/gps/pose/position/x
# 点击绿色的加号之后就可以可视化如下
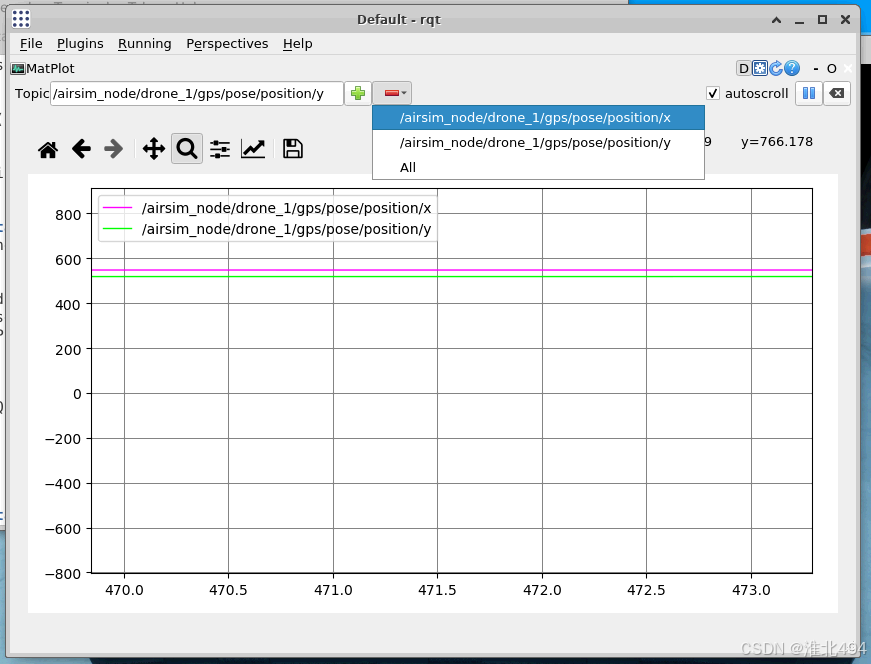
(5)其他的操作
如果删除话题,那么就点击红色的-,之后选中左键,或者直接鼠标放上面右键。
如果想要放大缩小,那么就点击这个放大镜,左键拉是放大比例,右键拉是缩小比例。