计算机视觉-局部图像描述子
[原发布时间: 2022-03-24 21:59:29]
目录
- 1. 相关概念
- 1.1 角点及其类型
- 1.2 角点的性质
- 1.3 Harris角点检测
- 2. 理论基础
- 2.1 Harris角点检测数学模型
- 2.2 角点响应函数
- 3. 代码实现
- 3.1 使用Harris检测器检测角点
- 3.2 为每个角点添加描述子
- 3.3 SIFT算法
- 3.4 描述子匹配
- 3.5 匹配地理标记图像
1. 相关概念
1.1 角点及其类型
角点:角点通常被定义为两条边的交点,严格说角点的局部邻域应该具有两个不同区域的不同方向的边界。角点检测(Corner Detection)是计算机视觉系统中获取图像特征的一种方法,广泛应用于运动检测、图像匹配、视频跟踪、三维重建和目标识别等,也可称为特征点检测。
角点的类型:
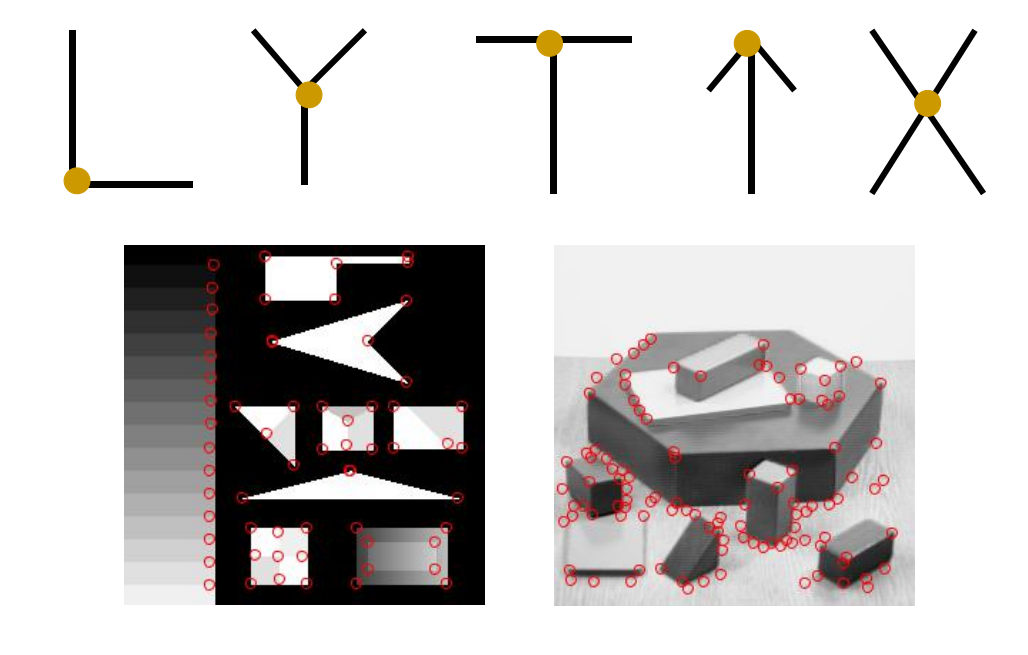
1.2 角点的性质
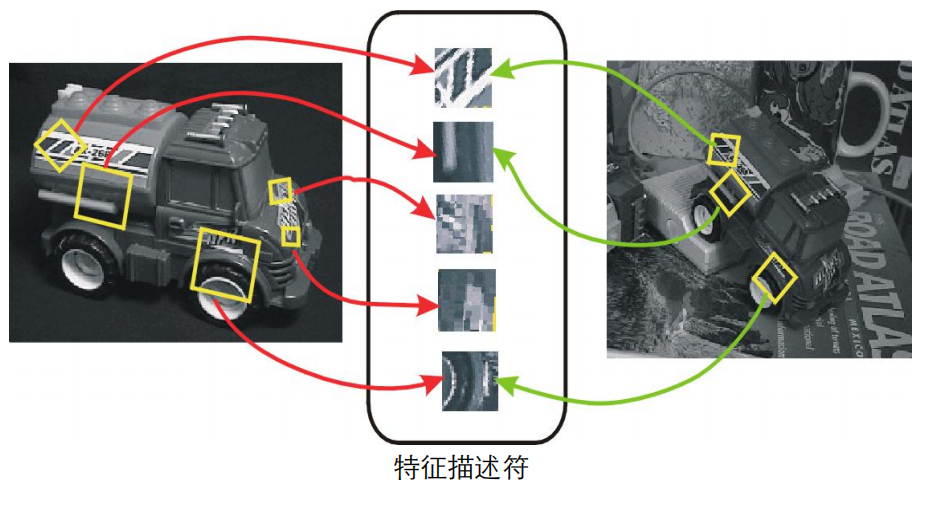
如上是同一物体在不同角度、明暗程度下的图片,但通过角点可以将两张图片进行特征匹配,因此需要求角点需具备以下基本性质:
- 几何不变性:位移、旋转、尺度……
- 光度不变性:光照、 曝光……
1.3 Harris角点检测
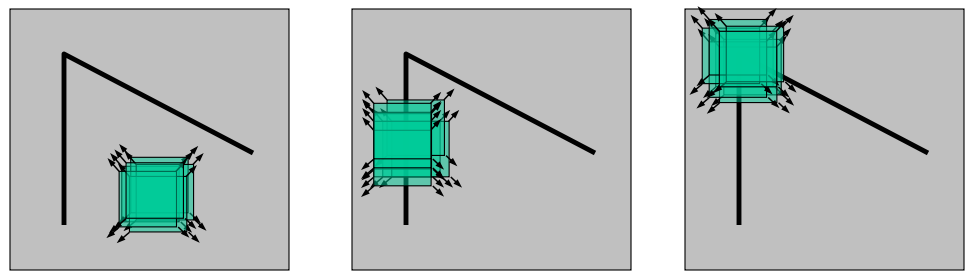
基本思想:使用一个固定窗口在图像上进行任意方向上的滑动,比较滑动前与滑动后窗口中的像素灰度变化程度。如果存在任意方向上的滑动,都有着较大灰度变化,那么我们可以认为该窗口中存在角点。
过程:
当一个窗口在图像上移动时,如图(a)(a)(a),窗口在各个方向上都没有变化,则认为窗口区域为平滑区域。如图(b)(b)(b),窗口在某个方向上没有变化,另一个方向上有明显变化,那么,这块区域可能存在边缘。如图(c)(c)(c),窗口在各个方向上灰度发生了较大的变化,那么,这块区域可能存在角点。Harris角点检测正是利用了这个直观的物理现象,通过窗口在各个方向上的变化程度来决定角点。
2. 理论基础
2.1 Harris角点检测数学模型
图像窗口平移[u,v]后产生的灰度变化E(u,v)可表示为
E(u,v)=∑x,yw(x,y)[I(x+u,y+v)−I(x,y)]2E(u,v)=\displaystyle\sum_{x,y}w(x,y)[I(x+u,y+v)-I(x,y)]^2E(u,v)=x,y∑w(x,y)[I(x+u,y+v)−I(x,y)]2
其中,w(x,y)w(x,y)w(x,y)为窗口函数,常见的窗口函数如下:

I(x+u,y+v)I(x+u,y+v)I(x+u,y+v)为平移后的图像灰度,I(x,y)I(x,y)I(x,y)为图像在(x,y)点的灰度。为了寻找带角点的窗口,需要搜索像素灰度变化较大的窗口。于是,我们期望最大化E(u,v)E(u,v)E(u,v)。
假设u和v很小,则有:
I(x+u,y+v)−I(x,y)≈Ixu+IyvI(x+u,y+v)-I(x,y)\approx I_xu+I_yvI(x+u,y+v)−I(x,y)≈Ixu+Iyv
于是对于局部微小的移动量[u,v],可以近似得到下面的表达式
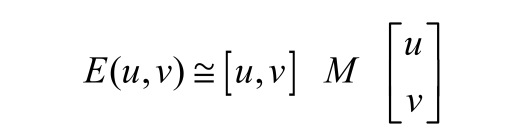
其中M是2x2矩阵,可由图像的导数求得
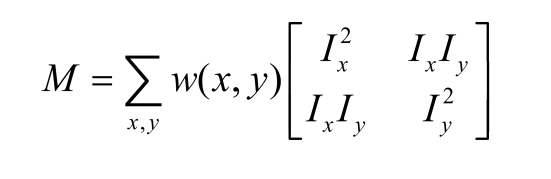
协方差矩阵可以表示多维随机变量之间的相关性。协方差矩阵的对角线元素表示的是各个维度的方差,而非对角线上的元素表示的是各个维度之间的相关性。可以把矩阵M看作一个二维随机分布的协方差矩阵,通过将其对角化,求矩阵的两个特征值,然后根据这两个特征值来判断是不是角点。
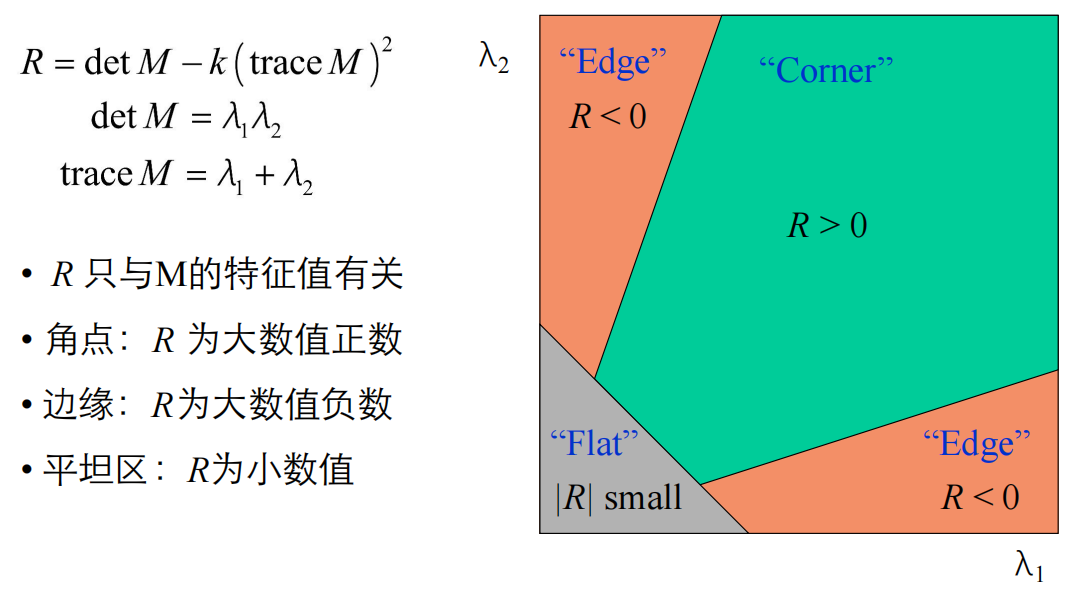
假设λ1,λ2为矩阵M的特征值,当λ1≫λ2或λ1≪λ2时,该区域为边缘点;当λ1和λ2都很小且接近时,该区域为平坦区域内的点;当λ1和λ2都很大且接近时,说明图像窗口在各个方向上移动都产生了明显灰度变化,此时该区域为角点。
2.2 角点响应函数
由于特征值的计算量较大,因此,实际中采用角点响应函数来检测角点。角点响应函数定义为
R=Det(M)−k[trace(M)]2=λ1λ2−k(λ1+λ2)2(k=0.04∽0.06)R=Det(M)-k[trace(M)]^2=\lambda_1\lambda_2-k(\lambda_1+\lambda_2)^2 \\ (k=0.04\backsim 0.06)R=Det(M)−k[trace(M)]2=λ1λ2−k(λ1+λ2)2(k=0.04∽0.06)
其中R的值只与M的特征值有关,R的值与区域类型的关系如下:
3. 代码实现
3.1 使用Harris检测器检测角点
源码:
from pylab import *
from PIL import Image
from PCV.localdescriptors import harris
# 添加中文字体支持
from matplotlib.font_manager import FontProperties
font = FontProperties(fname=r"c:\windows\fonts\SimSun.ttc", size=14)# 读入图像
im = array(Image.open('C:/Users/lenovo/Pictures/Saved Pictures/view1.jpg').convert('L'))
# 检测harris角点
harrisim = harris.compute_harris_response(im)
# Harris响应函数
harrisim1 = 255 - harrisim
figure()
gray()#画出Harris响应图
subplot(141)
imshow(harrisim1)
title(u'(1)', fontproperties=font)
print(harrisim1.shape)
axis('off')threshold = [0.01, 0.05, 0.1]
for i, thres in enumerate(threshold):filtered_coords = harris.get_harris_points(harrisim, 6, thres)subplot(1, 4, i+2)imshow(im)title(u'('+str(i+2)+')', fontproperties=font)print(im.shape)plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], '*')axis('off')
show()
运行结果:

其中,图(1)为画出Harris响应图,图(2-4)分别是使用阈值为0.01、0.05和0.1检测出的角点。
3.2 为每个角点添加描述子
源码:
from pylab import *
from PIL import Imagefrom PCV.localdescriptors import harris
from PCV.tools.imtools import imresizeim1 = array(Image.open("C:/Users/lenovo/Pictures/Saved Pictures/view1.jpg").convert("L"))
im2 = array(Image.open("C:/Users/lenovo/Pictures/Saved Pictures/view2.jpg").convert("L"))# resize加快匹配速度
im1 = imresize(im1, (im1.shape[1]/2, im1.shape[0]/2))
im2 = imresize(im2, (im2.shape[1]/2, im2.shape[0]/2))wid = 5
harrisim = harris.compute_harris_response(im1, 5)
filtered_coords1 = harris.get_harris_points(harrisim, wid+1)
d1 = harris.get_descriptors(im1, filtered_coords1, wid)harrisim = harris.compute_harris_response(im2, 5)
filtered_coords2 = harris.get_harris_points(harrisim, wid+1)
d2 = harris.get_descriptors(im2, filtered_coords2, wid)print('starting matching')
matches = harris.match_twosided(d1, d2)figure()
gray()
harris.plot_matches(im1, im2, filtered_coords1, filtered_coords2, matches)
show()
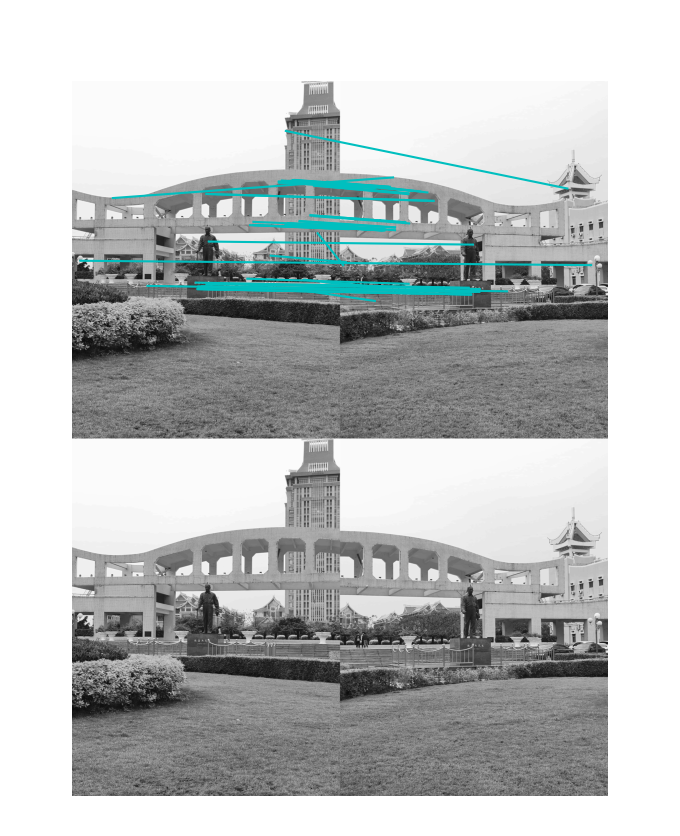
运行结果:
3.3 SIFT算法
由于Harris角点检测器是旋转不变的,这意味着即使图像旋转了,检测器也可以找到相同的角,这是因为转角在旋转的图像中也仍然是转角。但是在缩放的情况下拐角可能不是拐角。例如,使用检测器检查下面的简单图像,在同一窗口中放大小窗口图像中的拐角时,该角可认为是平坦的,即Harris拐角不是尺度不变的。因此,在2004年,不列颠哥伦比亚大学的D.Lowe在他的论文《尺度不变关键点中的独特图像特征》中提出了一种新算法,即尺度不变特征变换(SIFT)算法,该算法提取关键点并计算其描述算符,并且SIFT算法能够适应旋转、尺度缩放、亮度的变化,也能在一定程度上不受视角变化、仿射变换、噪声的干扰。
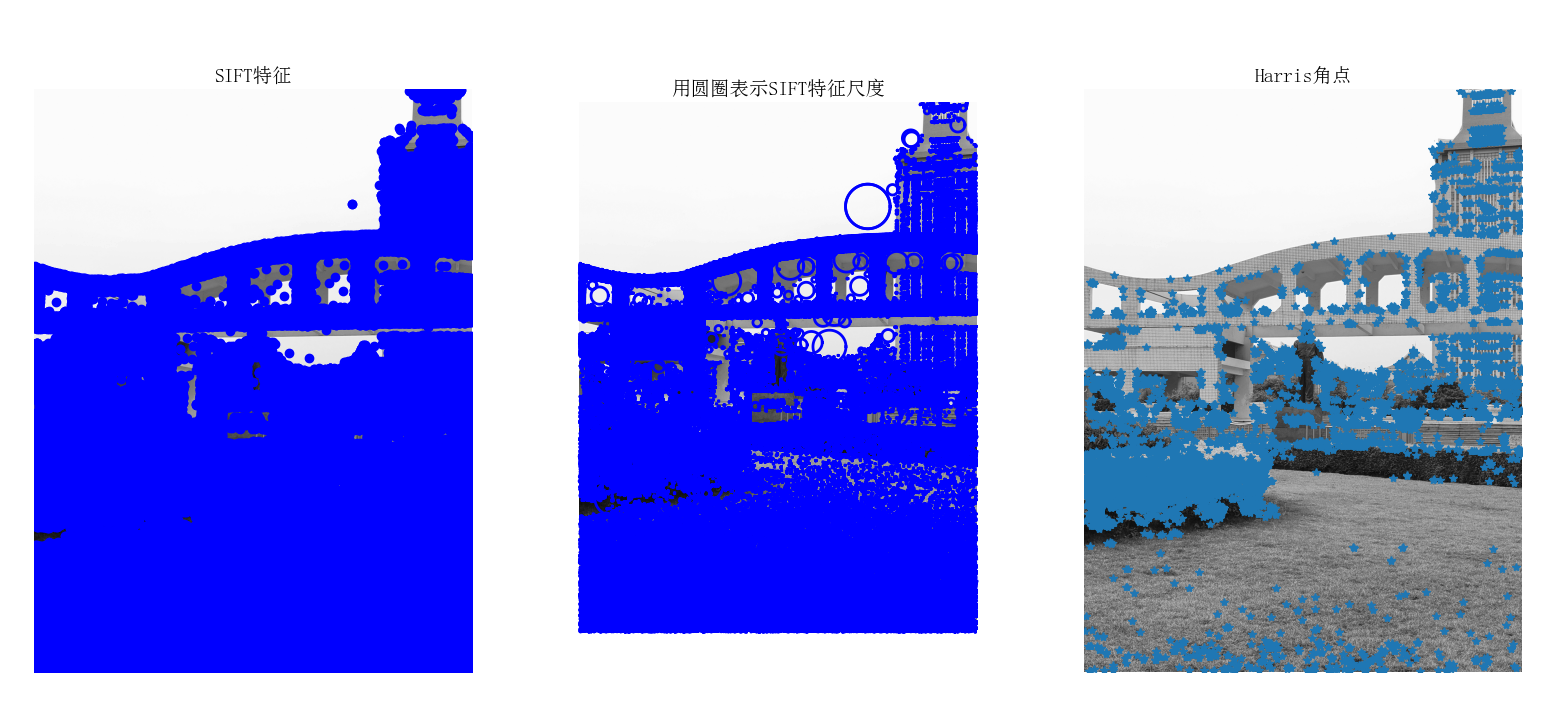
下面使用SIFT算法对图像提取SIFT特征,并与提取的Harri角点进行比较。
源码:
from PIL import Image
from pylab import *
from PCV.localdescriptors import sift
from PCV.localdescriptors import harris# 添加中文字体支持
from matplotlib.font_manager import FontProperties
font = FontProperties(fname=r"c:\windows\fonts\SimSun.ttc", size=14)imname = 'C:/Users/lenovo/Pictures/Saved Pictures/view1.jpg'
im = array(Image.open(imname).convert('L'))
sift.process_image(imname, 'empire.sift')
l1, d1 = sift.read_features_from_file('empire.sift')figure()
gray()
subplot(131)
sift.plot_features(im, l1, circle=False)
title(u'SIFT特征',fontproperties=font)
subplot(132)
sift.plot_features(im, l1, circle=True)
title(u'用圆圈表示SIFT特征尺度',fontproperties=font)# 检测harris角点
harrisim = harris.compute_harris_response(im)
subplot(133)
filtered_coords = harris.get_harris_points(harrisim, 6, 0.1)
imshow(im)
plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], '*')
axis('off')
title(u'Harris角点',fontproperties=font)
show()
运行结果:
(注:运行代码时报“empire.sift not found”错误时的解决方法)
3.4 描述子匹配
from PIL import Image
from pylab import *
from PCV.localdescriptors import siftim1f = 'C:/Users/lenovo/Pictures/Saved Pictures/view3.jpg'
im2f = 'C:/Users/lenovo/Pictures/Saved Pictures/view4.jpg'im1 = array(Image.open(im1f).convert('L'))
im2 = array(Image.open(im2f).convert('L'))sift.process_image(im1f, 'out_sift_1.txt')
l1, d1 = sift.read_features_from_file('out_sift_1.txt')
figure()
gray()
subplot(121)
sift.plot_features(im1, l1, circle=False)sift.process_image(im2f, 'out_sift_2.txt')
l2, d2 = sift.read_features_from_file('out_sift_2.txt')
subplot(122)
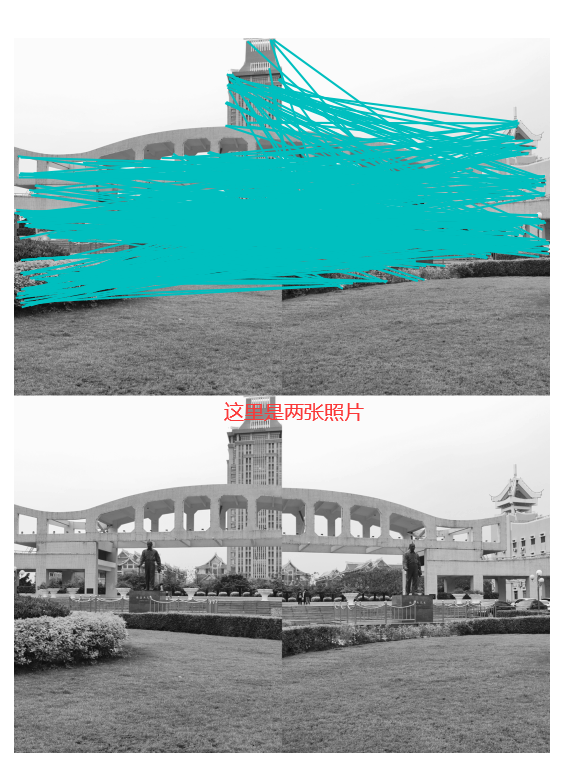
sift.plot_features(im2, l2, circle=False)matches = sift.match_twosided(d1, d2)
print ('{} matches'.format(len(matches.nonzero()[0])))figure()
gray()
sift.plot_matches(im1, im2, l1, l2, matches, show_below=True)
show()
运行结果:
3.5 匹配地理标记图像
源码:
from pylab import *
from PIL import Image
from PCV.localdescriptors import sift
from PCV.tools import imtools
import pydotdownload_path = "D:/image/" # set this to the path where you downloaded the panoramio images
path = "D:/image/" # path to save thumbnails (pydot needs the full system path)imlist = imtools.get_imlist(download_path)
nbr_images = len(imlist)featlist = [imname[:-3] + 'sift' for imname in imlist]
for i, imname in enumerate(imlist):sift.process_image(imname, featlist[i])matchscores = zeros((nbr_images, nbr_images))for i in range(nbr_images):for j in range(i, nbr_images): # only compute upper triangleprint('comparing ', imlist[i], imlist[j])l1, d1 = sift.read_features_from_file(featlist[i])l2, d2 = sift.read_features_from_file(featlist[j])matches = sift.match_twosided(d1, d2)nbr_matches = sum(matches > 0)print('number of matches = ', nbr_matches)matchscores[i, j] = nbr_matches
print("The match scores is: \n", matchscores)
for i in range(nbr_images):for j in range(i + 1, nbr_images): # no need to copy diagonalmatchscores[j, i] = matchscores[i, j]#可视化
threshold = 2 # min number of matches needed to create linkg = pydot.Dot(graph_type='graph') # don't want the default directed graphfor i in range(nbr_images):for j in range(i + 1, nbr_images):if matchscores[i, j] > threshold:# first image in pairim = Image.open(imlist[i])im.thumbnail((100, 100))filename = path + str(i) + '.png'im.save(filename) # need temporary files of the right sizeg.add_node(pydot.Node(str(i), fontcolor='transparent', shape='rectangle', image=filename))# second image in pairim = Image.open(imlist[j])im.thumbnail((100, 100))filename = path + str(j) + '.png'im.save(filename) # need temporary files of the right sizeg.add_node(pydot.Node(str(j), fontcolor='transparent', shape='rectangle', image=filename))g.add_edge(pydot.Edge(str(i), str(j)))
g.write_png('jmu.png')
由于运行该代码需要消耗足够大的算力,耗时一整天仍未出结果后暂时放弃运行,因此暂无图像集匹配连线后的结果( •̀ ω •́ )✧。