低空经济应用-无人机拉格朗日粒子追踪技术
拉格朗日粒子追踪技术旨在研究悬浮颗粒的运动规律——包括它们的扩散方式以及与气流的相互作用。传统方法通常通过摄像头和计算机视觉追踪示踪粒子(如种子颗粒或氦气泡)来实现。但若能用一架易追踪且搭载关键传感器的无人机来模拟拉格朗日粒子的行为呢?
普林斯顿大学智能机器人运动实验室(IRoM Lab)提出了这一设想,探索无人机如何帮助人类更高效地研究大气中颗粒物与污染物的扩散机制。
目录
1. 流体测量的欧拉与拉格朗日方法
2. 案例:无人机追踪风场流动
3. 拉格朗日粒子追踪的应用场景

图1:IRoM实验室的Nathaniel Simon与6×3 Windshaper风墙装置
1. 流体测量的欧拉与拉格朗日方法
欧拉法和拉格朗日法均用于研究悬浮颗粒的运动,但视角截然不同:
- 拉格朗日法:以粒子自身为参考系,记录其运动轨迹。
- 欧拉法:在空间固定点观测流经该位置的粒子属性。
"拉格朗日信息关注流体微团的行为,而欧拉信息关注速度、压力等场变量的时空变化。" —— Dr. Smyth,《万物皆流:自然科学中的流体力学》(2019)
这种差异直接影响了数据采集方式:
- 欧拉法:在河岸固定点测量水流经过时的属性(如流速)。
- 拉格朗日法:追踪河中一片树叶(或一艘随波逐流的船)的移动路径。
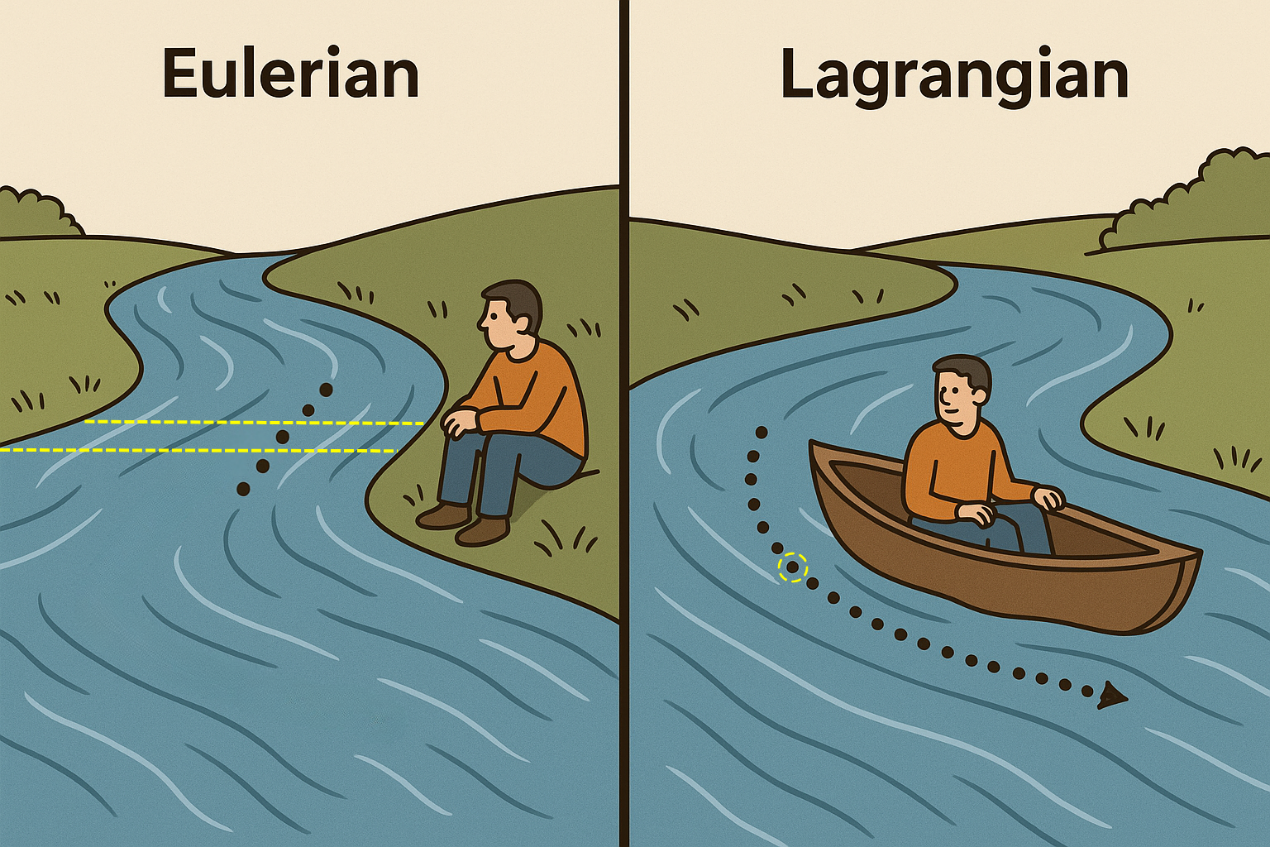
图2:欧拉法(固定点测量)与拉格朗日法(追踪粒子)对比
历史上,欧拉法因实施简便更受青睐。Saidi等人在2014年的研究中指出:"拉格朗日法需计算每个粒子的行为,耗时远超欧拉法的群体均值分析。"然而,拉格朗日法能提供独特的扩散视角——若技术瓶颈被突破,其应用潜力将大幅提升。
2. 案例:无人机追踪风场流动
IRoM实验室尤其关注拉格朗日法在污染物扩散研究中的价值。为此,他们开发了"LaDrone"(拉格朗日无人机)项目,旨在通过无人机简化该技术的实施。
LaDrone的三大设计核心:
- 轻量化:仅40克重量,可快速响应微小气流变化。
- 重力补偿控制:仅抵消重力,依靠气动力驱动运动,模拟中性浮力粒子。
- 厘米级GNSS定位:后处理动态定位技术实现亚厘米级精度。
LaDrone在Windshaper前的测试:(点击观看视频)
LaDrone在Windshaper前的测试
团队利用6×3 Windshaper风墙(含162个独立控制的风扇单元)生成可控气流进行测试。初期发现:LaDrone虽响应迅速,但速度仅为气流实际速度的50%。
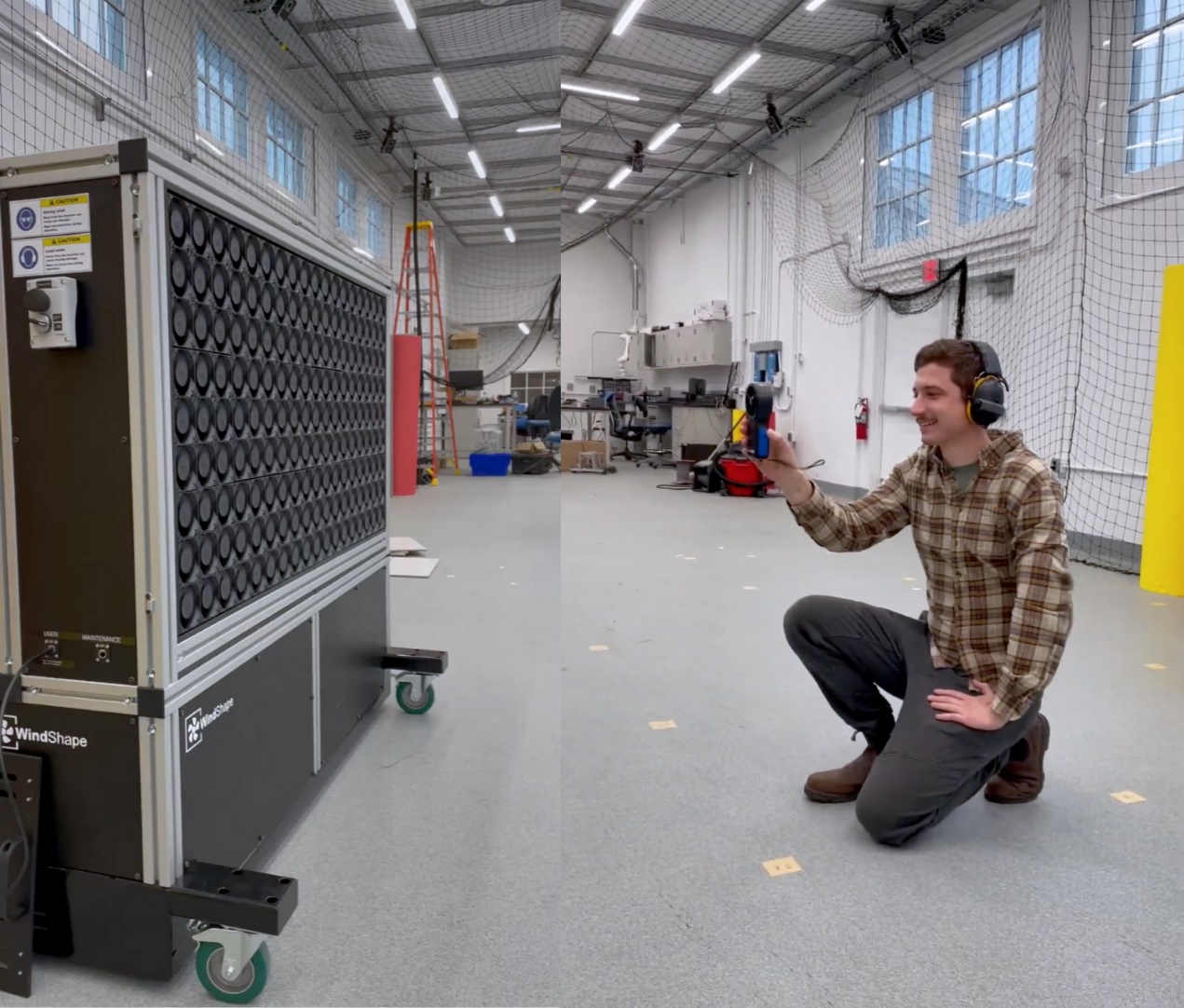
图4:普林斯顿大学智能机器人运动实验室的6×3 Windshaper风墙系统
受Bollt等人2021年"湍流能量快速追踪控制"研究的启发,团队调整控制器参数,使其不仅能感知阵风,还能放大风效。改进后的"顺风控制器"显著提升了追踪精度(见图5)。
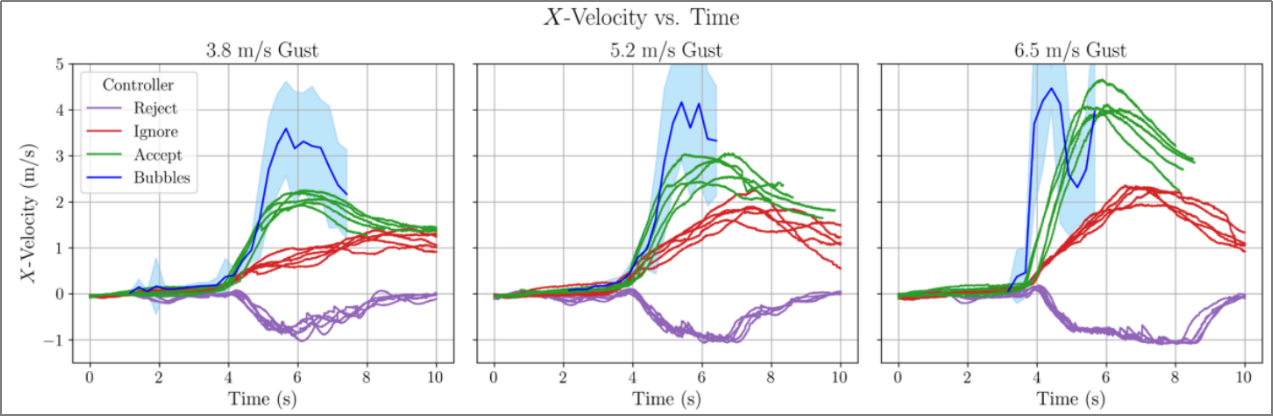
图5:接受/忽略/抵抗阵风的控制器速度追踪效果对比
3. 拉格朗日粒子追踪的应用场景
该技术尤其适用于环境扩散研究,通过追踪单个粒子揭示实际场景中的扩散规律。典型应用包括:
- 预测野火烟雾的传播路径
- 分析气流以限制空气传播疾病
- 评估工业项目对周边空气质量的影响
无人机进一步扩展了技术边界:除轨迹追踪外,其搭载的传感器可直接测量流场内部属性。IRoM实验室还探索了另一方向:从气流中提取能量以实现高效飞行(研究进展将持续更新)。
结语
拉格朗日粒子追踪技术潜力巨大,而无人机的引入(如LaDrone)使其数据采集能力更上一层楼。
了解更多
- IRoM实验室官网
- LaDrone项目主页 | Dr. Nathaniel Simon