【绘制图像轮廓】——图像预处理(OpenCV)
目录
1 什么是轮廓
2 寻找轮廓
2.1 mode参数
2.2 method参数
3 绘制轮廓
1 什么是轮廓
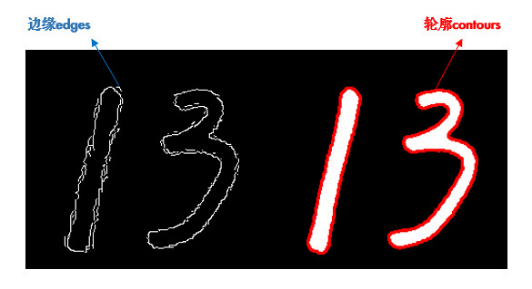
轮廓是一系列相连的点组成的曲线,代表了物体的基本外形。轮廓是连续的,边缘不一定连续。轮廓是一个闭合的、封闭的形状。
轮廓的作用:
-
形状分析
-
目标识别
-
图像分割
2 寻找轮廓
在OpenCV中,使用cv2.findContours()来进行寻找轮廓,具体的实现原理可参考:
https://zhuanlan.zhihu.com/p/107257870
寻找轮廓需要将图像做一个二值化处理,并且根据图像的不同选择不同的二值化方法来将图像中要绘制轮廓的部分置为白色,其余部分置为黑色。如下图所示。
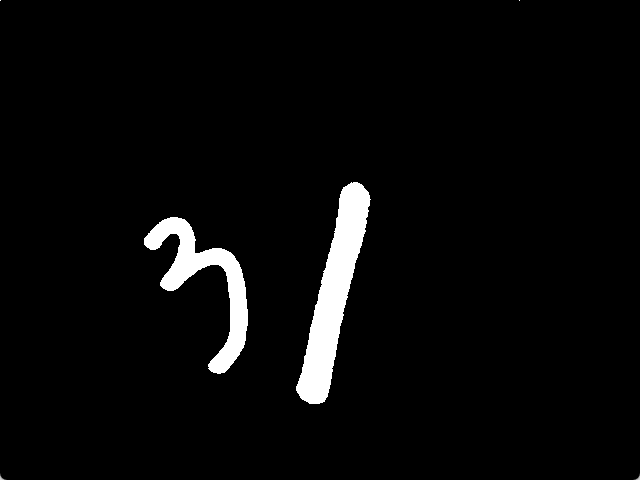
之后,对图像中的像素进行遍历,当一个白色像素相邻(上下左右及两条对角线)位置有黑色像素存在或者一个黑色像素相邻(上下左右及两条对角线)位置有白色像素存在时,那么该像素点就会被认定为边界像素点,轮廓就是有无数个这样的边界点组成的。
下面具体介绍一下cv2.findContours()函数,其函数原型为:
contours,hierarchy = cv2.findContours(image,mode,method)-
返回值:[ 轮廓点坐标 ] 和 [ 层级关系 ]。
-
contours:表示获取到的轮廓点的列表。检测到有多少个轮廓,该列表就有多少子列表,每一个子列表都代表了一个轮廓中所有点的坐标。
-
hierarchy:表示轮廓之间的关系。对于第i条轮廓,hierarchy[i][0], hierarchy[i][1] , hierarchy[i][2] , hierarchy[i][3]分别表示其后一条轮廓、前一条轮廓、(同层次的第一个)子轮廓、父轮廓的索引(如果没有相应的轮廓,则对应位置为-1)。该参数的使用情况会比较少。
-
image:表示输入的二值化图像。
-
mode:表示轮廓的检索模式。
-
method:轮廓的表示方法。
2.1 mode参数
轮廓查找方式。返回不同的层级关系。
mode参数共有四个选项分别为:RETR_LIST,RETR_EXTERNAL,RETR_CCOMP,RETR_TREE。
1. RETR_EXTERNAL
表示只查找最外层的轮廓。并且在hierarchy里的轮廓关系中,每一个轮廓只有前一条轮廓与后一条轮廓的索引,而没有父轮廓与子轮廓的索引。
2. RETR_LIST
表示列出所有的轮廓。并且在hierarchy里的轮廓关系中,每一个轮廓只有前一条轮廓与后一条轮廓的索引,而没有父轮廓与子轮廓的索引。
3. RETR_CCOMP
表示列出所有的轮廓。并且在hierarchy里的轮廓关系中,轮廓会按照成对的方式显示。
在 RETR_CCOMP 模式下,轮廓被分为两个层级:
-
层级 0:所有外部轮廓(最外层的边界)。
-
层级 1:所有内部轮廓(孔洞或嵌套的区域)。
4. RETR_TREE
表示列出所有的轮廓。并且在hierarchy里的轮廓关系中,轮廓会按照树的方式显示,其中最外层的轮廓作为树根,其子轮廓是一个个的树枝。
2.2 method参数
轮廓存储方法。轮廓近似方法。决定如何简化轮廓点的数量。就是找到轮廓后怎么去存储这些点。
method参数有三个选项:CHAIN_APPROX_NONE、CHAIN_APPROX_SIMPLE、CHAIN_APPROX_TC89_L1。
-
CHAIN_APPROX_NONE表示将所有的轮廓点都进行存储 -
CHAIN_APPROX_SIMPLE表示只存储有用的点,比如直线只存储起点和终点,四边形只存储四个顶点,默认使用这个方法;
对于mode和method这两个参数来说,一般使用RETR_EXTERNAL和CHAIN_APPROX_SIMPLE这两个选项。
3 绘制轮廓
轮廓找出来后,其实返回的是一个轮廓点坐标的列表,因此我们需要根据这些坐标将轮廓画出来,因此就用到了绘制轮廓的方法。
cv2.drawContours(image, contours, contourIdx, color, thickness)-
image:原始图像,一般为单通道或三通道的 numpy 数组。
-
contours:包含多个轮廓的列表,每个轮廓本身也是一个由点坐标构成的二维数组(numpy数组)。
-
contourIdx:要绘制的轮廓索引。如果设为
-1,则会绘制所有轮廓。根据索引找到轮廓点绘制出来。默认是-1。 -
color:绘制轮廓的颜色,可以是 BGR 值或者是灰度值(对于灰度图像)。
-
thickness:轮廓线的宽度,如果是正数,则画实线;如果是负数,则填充轮廓内的区域。
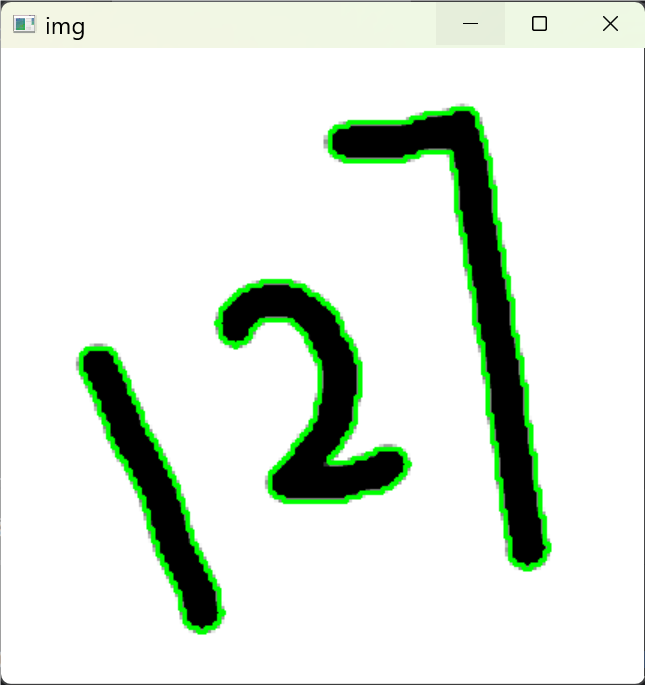
案例:
import cv2 as cv
# 读图,转灰度
img = cv.imread("./images/num.png")
number = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
# 二值化
ret,binary = cv.threshold(number,127,255,cv.THRESH_BINARY_INV)
# 查找轮廓: [轮廓列表],[层级关系] = cv2.findCountours(img,mode(如何找),method(如何存))
counters,h = cv.findContours(binary,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE)
# 绘制轮廓:cv.drawContours(img,counters,-1(要绘制轮廓的索引),color,thickness)
cv.drawContours(img,counters,-1,(0,255,0),2)
# 显示原图
cv.imshow("img",img)
cv.waitKey(0)
cv.destroyAllWindows()
print(counters)
print("---------")
print(h)输出: