无人机数传链路模块技术分析
一、运行方式
1. 单机自主运行模式
实时状态监控:通过传感器持续采集信号强度、信噪比(SNR)、误码率(BER)等参数,结合自组网节点相互诊断链路健康状态。
动态信道切换:当检测到天线松动或信号衰减时,系统在毫秒级自动切换至备用信道,并关闭受损信道防止硬件过载。
抗干扰机制:采用AI频谱调度算法,在0.3秒内识别200余种干扰源并动态调整频段,确保复杂电磁环境下98.6%的通话接通率。
2. 多机组网协同模式
分层自治架构:
单机层:搭载改进RRT算法,融合三维雷达与视觉感知,实现50ms内路径规划与避障。
通信中继层:利用毫米波通信平台构建三维波束,解决无人机抖动导致的信号失配,在20km距离下误码率低至10⁻⁶。
协同层:基于分布式联盟算法实现多机任务分配,例如3机编队搜索效率提升210%,冲突率下降92%。
蜂群组网:32架无人机可自动构建直径20km的通信覆盖圈,等效于500米高空部署46个微型基站,支持万人级并发通信。
3. 空地一体通信模式
空-天-地三维融合:通过卫星回传骨干数据,无人机作为中继节点覆盖盲区,地面站集中处理AI分析结果,形成毫秒级响应闭环。
5G-A增强应用:利用5G-A网络高带宽、低时延特性,实现超高清图传与远程实时操控。
二、技术要点与难点
1. 通信可靠性与抗干扰
要点:采用多模通信技术,结合硬件损伤补偿算法,降低环境噪声影响。
难点:
动态信道衰减:无人机高速移动导致多普勒频移加剧,需实时校正频偏。
密集干扰规避:城市环境中Wi-Fi、5G基站等信号密集,传统频谱检测难以满足实时性要求。
2. 低时延高带宽传输
要点:
5G-A网络支持端到端时延≤10ms,满足超高清视频回传需求。
光通信(FSO)提供大容量传输,但需解决大气湍流导致的信号抖动。
难点:抖动补偿——无人机姿态变化引发光束偏移,需三维UPF波束跟踪算法动态调整发射角。
3. 多机协同通信
要点:分布式联盟算法实现任务动态分配,避免集中式控制的单点故障。
难点:
资源竞争:多机数据同步引发信道拥塞,需TDMA/OFDMA等多址技术优化。
安全威胁:窃听无人机劫持通信链路,需物理层加密(如波束成形定向传输)。
4. 信道估计与波束设计
要点:构建“信道知识地图”,结合地理信息预测信道状态,减少80%的信道估计开销。
难点:三维波束对齐——城市多径效应导致波束失准,需强化学习算法动态优化相位。
5. 标准化与系统集成
现状:深圳已立项《低空飞行器集成控制系统设计要求》等7项团体标准,规范多系统协同接口。
难点:异构协议兼容——不同厂商设备接口差异大,需统一数据格式。
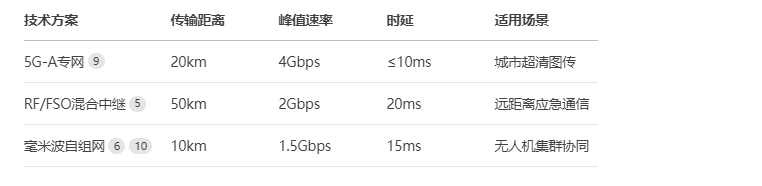
三、典型案例与性能对比
下表对比三种典型数传链路技术的性能表现:
四、发展趋势
1. 智能韧性网络:结合DRL算法动态优化链路调度。
2. 低功耗绿色通信:研发太阳能中继无人机,延长应急网络续航。
3. 全域安全管控:推进“五网融合”,实现低空数字孪生监管。
数传链路模块正从单机通信向“空天地一体”智能化协同演进,其核心在于攻克动态环境下的实时性、可靠性及多主体协同难题,需结合通信协议、硬件补偿及AI决策的综合优化。
