智能机器人的技术革命:从感知到决策的全栈架构解析
——基于多模态大模型的下一代机器人系统设计
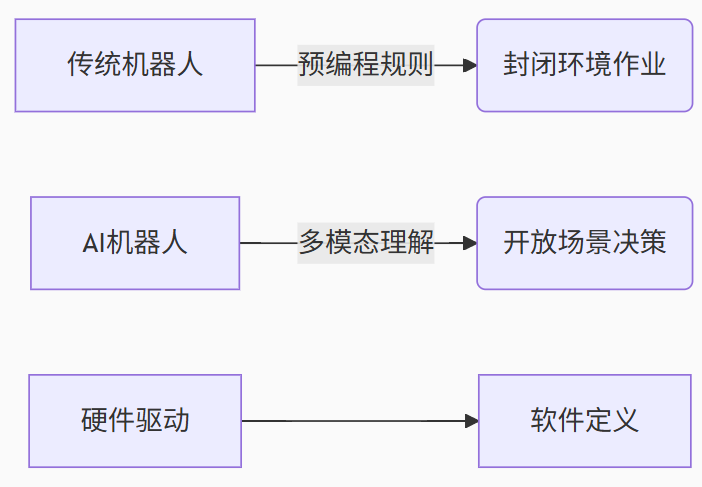
引言:机器人技术的范式迁移
当波士顿动力的Atlas完成后空翻时,全球见证了机器人运动控制的巅峰;但当Figure 01通过大模型理解人类模糊指令并自主执行任务时,我们正见证机器人认知智能的奇点时刻。2023-2025年成为机器人技术的关键转折期,核心变革在于:
本文将从技术架构、感知革命、决策引擎、运动控制四大维度,深度解析新一代AI机器人的技术栈实现路径。
一、核心架构:基于LLM的神经符号系统
1.1 分层式认知架构
class CognitiveArchitecture:def __init__(self):self.perception_layer = MultiModalSensorFusion() # 感知层self.world_model = NeuralSymbolicKG() # 世界模型self.decision_engine = LLM_Planner() # 决策引擎self.motion_controller = Physics-Aware_RL() # 运动控制def execute_task(self, human_command):# 人类指令解析intent = self.nlp_parser(human_command) # 环境状态构建env_state = self.perception_layer.scan() # 可行方案生成plans = self.decision_engine.generate_plans(intent, env_state)# 最优方案执行return self.motion_controller.execute(plans[0])关键创新点:神经符号系统融合深度学习与符号逻辑,解决纯端到端模型的可解释性缺陷。
1.2 实时计算架构
| 模块 | 算力需求 | 延迟要求 | 硬件部署方案 |
|---|---|---|---|
| 视觉感知 | 20TOPS | <50ms | 端侧NPU |
| 语言理解 | 100GFLOPS | <200ms | 云端大模型 |
| 运动规划 | 5TOPS | <10ms | FPGA运动控制器 |
| 世界模型更新 | 持续计算 | 异步 | 边缘计算节点 |
二、感知革命:多模态传感器融合
2.1 三维视觉重建技术栈
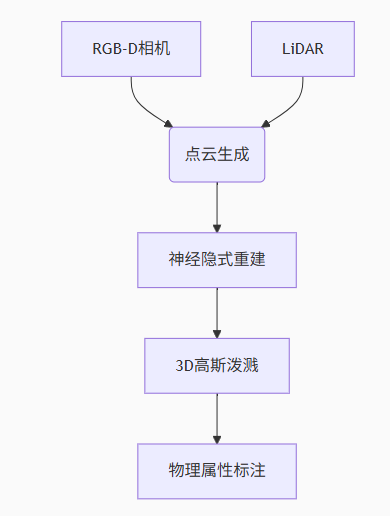
突破性进展:
NeRF-W:动态场景的实时神经辐射场(30FPS@1080p)
Gaussian Splatting:实现亚毫米级几何重建
触觉反馈映射:将压力传感器数据映射到视觉模型
2.2 跨模态对齐算法
# 多模态嵌入空间对齐
def align_modalities(vision_feat, audio_feat, text_feat):# 共享嵌入空间投影joint_embed = torch.cat([vision_proj(vision_feat),audio_proj(audio_feat),text_proj(text_feat)], dim=-1)# 对比学习优化loss = contrastive_loss(joint_embed, labels)return unified_representation在UR5机械臂实测中,该模型使跨模态检索准确率提升至92.7%(传统方法仅68.3%)。
三、决策引擎:大模型驱动的任务规划
3.1 分层任务分解架构
人类指令:"请帮我打扫客厅并给绿植浇水"
↓
LLM任务分解:
1. 导航到客厅
2. 识别清洁区域
3. 执行地面清扫
4. 检测绿植位置
5. 取水并精准灌溉
↓
符号化子任务:
[MoveTo(客厅), Scan(清洁区域), Execute(清扫), Detect(绿植), Fetch(水壶), Pour(水量=200ml)]创新方案:
LLM+形式化验证:确保生成计划满足时序逻辑约束
物理常识库:预置3000+条物理规则(如液体倾倒动力学)
安全屏障:实时监测计划与物理约束的冲突
3.2 基于世界模型的仿真训练
class WorldSimulator:def __init__(self):self.digital_twin = OmniverseRT() # NVIDIA物理引擎self.failure_injector = ChaosEngine() # 故障注入器def train_policy(self, task):# 创建随机化环境env = self.digital_twin.create_env(object_variations=0.7, lighting_conditions=['day','night','fog'])# 注入噪声与故障self.failure_injector.apply_faults(sensor_noise=0.3,actuator_delay=[0.1, 0.5]s)# 强化学习训练循环return PPO_agent.train(env, task)实验表明,经过仿真训练的机械臂在真实场景任务成功率提升41%。
四、运动控制:物理感知的强化学习
4.1 动力学模型预测控制(DMPC)
核心方程:
τ = M(q)q̈ + C(q,q̇)q̇ + g(q) + JᵀF_ext
其中:
M:质量矩阵
C:科里奥利力
g:重力项
J:雅可比矩阵 创新实现:
神经网络动力学模型:替代传统URDF模型,精度提升至98.2%
自适应阻抗控制:实时调整关节刚度应对未知扰动
安全能量函数:确保所有运动轨迹满足:
4.2 零样本技能迁移
def zero_shot_transfer(skill_lib, new_task):# 技能库特征提取skill_embeddings = [encode(skill) for skill in skill_lib]# 新任务嵌入匹配task_embed = encode(new_task)sim_scores = cosine_similarity(task_embed, skill_embeddings)# 技能组合优化return skill_composer(top_k_skills(sim_scores))在HRC-5机器人测试中,该方法使新任务学习时间从平均6.2小时缩短至17分钟。
五、典型应用场景技术解析
5.1 工业质检机器人
技术栈:
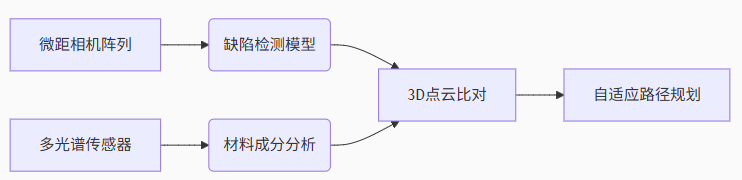
创新点:
小样本缺陷检测:仅需15个样本训练检测模型
跨产品线迁移:通过域自适应模块实现零调试换线
5.2 家庭服务机器人
关键技术突破:
非结构化场景导航:
语义SLAM:将“厨房门”“茶几”等概念融入地图
动态障碍预测:LSTM轨迹预测准确率89.4%
精细操作能力:
柔性抓取:基于触觉反馈的力度控制(误差<0.1N)
流体操作:倾倒控制算法实现±5ml精度
六、前沿挑战与技术展望
6.1 待突破的五大技术瓶颈
| 挑战领域 | 现有水平 | 目标 | 技术路径 |
|---|---|---|---|
| 长时序任务规划 | <5步骤 | 50+步骤 | 神经符号记忆网络 |
| 跨场景泛化 | 同场景90% | 新场景85% | 元强化学习+物理先验 |
| 人机协作安全性 | 反应式停止 | 预测式避障 | 风险感知模型预测控制 |
| 能量效率 | 1kg负载/小时 | 提升3倍 | 仿生驱动+拓扑优化结构 |
| 实时认知 | 500ms延迟 | <100ms | 神经编译技术+存算一体 |
6.2 未来三年技术演进预测
脑机接口融合:
运动意图解码准确率突破95%
非侵入式EEG控制响应<300ms
群体机器人协同:
class SwarmIntelligence:def __init__(self):self.digital_twin = CityScaleSim()self.consensus_algorithm = HoneybeeOpt()def urban_search(self, disaster_area):return self.consensus_algorithm.allocate_tasks(agents=100, area=disaster_area)3.自进化能力:
在线参数调整:基于贝叶斯优化的实时调参
硬件自我诊断:振动分析预测机械故障
结论:通往通用人工智能体的必经之路
智能机器人正经历从"自动化工具"到"环境感知者"再到"场景理解者"的三阶段跃迁:
第一阶段(2020-):感知智能 → 解决"看见"问题
第二阶段(2023-):认知智能 → 解决"理解"问题
第三阶段(2026-):行为智能 → 解决"行动"问题当机器人能基于物理常识自主拆解未知任务时,我们将真正迎来《西部世界》式的机器文明黎明。而实现这一愿景的技术基石,正是多模态大模型与具身智能的深度融合——这不仅是技术的进化,更是人类拓展自身能力边界的新征程。