海洋大地测量基准与水下导航系列之九我国海洋PNT最新技术进展(中)
二、我国首个海底大地测量基准试验网建成依据
我国在“十三五”期间开展了海底大地控制网建设工作,填补了我国大地测量基准在广阔海域的空白,为国家海底大地测量基准可行性论证提供了技术支持。结合我国目前的装备能力和技术水平,我国海底大地控制网建设的技术指标体系论证包括海底观测精度、点位密度和布网方案优化设计等多个方面,并已经取得一些进展。
我国首次海底空间基准试验团队从山东青岛出发,历时25天、行程7600km,在南海3000m水深海域首次完成了我国深海海底空间基准构建技术试验,为我国深海海底空间基准建设提供了技术支撑,积累了海底基准工程经验。下图为我国科研团队在南海开展深海空间基准建设技术试验现场。

2019年7月在水深3000m的海域进行了布网及观测试验。
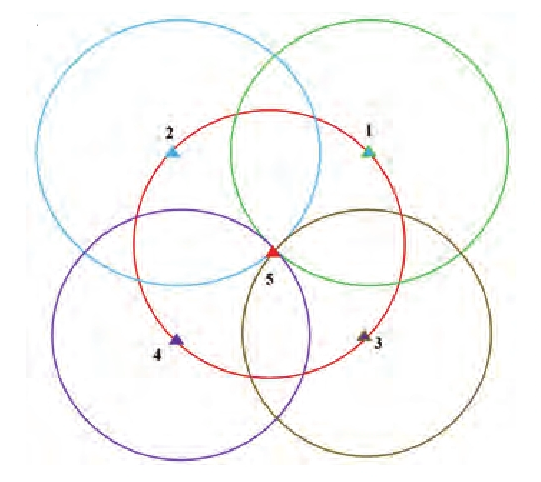
下图为海底基准网和海面测线分布图,5个海底基准点采用主站置于中间,辅站成四边形布置的构型,每个点进行一次圆半径约为0.5倍水深的圆走航观测。此外,对5号点还进行一个半径为1.5倍水深的圆走航观测和交叉十字观测。
相对于陆地观测环境,海洋环境相对恶劣,观测数据异常误差偏多,这种异常误差对点位最小二乘估计结果有较大影响。为抑制异常误差影响,计算中采用 IGGIII方案抗差估计法进行数据处理。为比较不同的观测策略对结果的影响,采用如下观测方案数据进行计算:
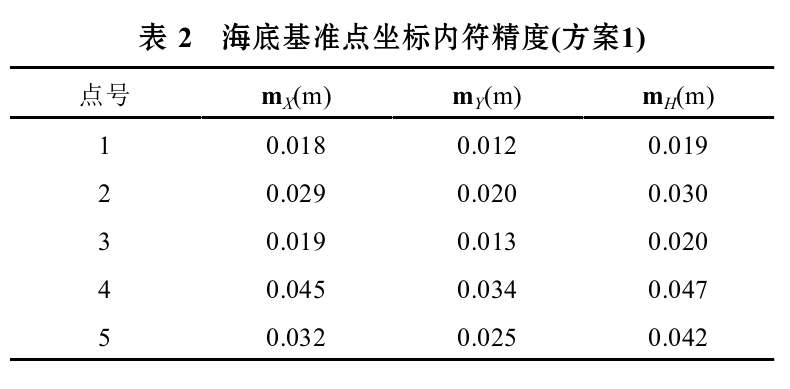
方案1,采用圆 半径约为0.5倍水深的圆走航观测;
方案2,采用圆半径约为1.5倍水深的圆走航观测;
方案3,采用十字观测;
方案4,圆形测量加十字观测。
表2为方案1中圆走航5个点的定位结果的内符合精度;海底定位试验的基准点坐标分量内符合精度在1.2~4.7cm。
5号基准点还进行不同半径圆走航观测和交叉十字观测,其结果见表3;

以其不同观测图形计算结果的均值为参考,给出了各方案计算结果与参考值的差异(见表4)。
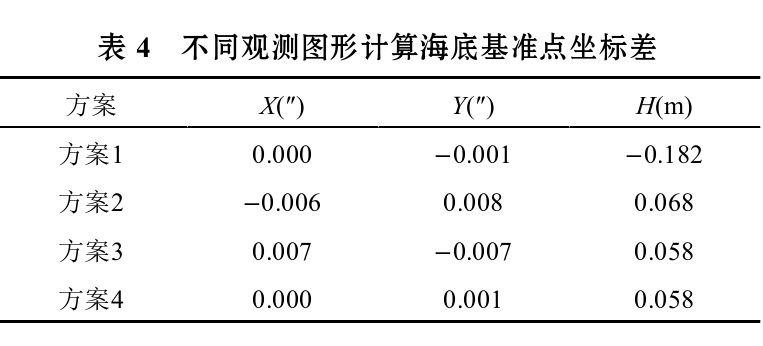
表3和表4表明,不同观测方案计算的点位坐标结果差异较小,X分量最大差异为 0.007″,Y分量最大差异为0.008″,在H分量最大差异为−0.182m。
海底基准点测定完成后,再同时跟踪五个海底控制点进行海面导航定位,与海面载体的GNSS测量结果进行对比评价声纳导航定位精度。声纳导航验证采用格网型检测图形,最远点离海底基准网中心 11km。
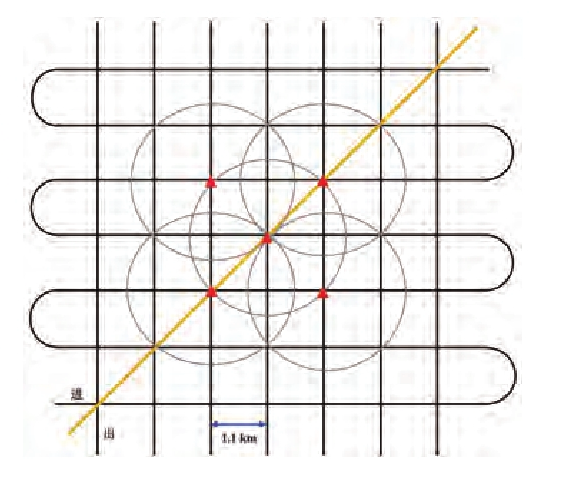
结果表明,海底基准点覆盖范围内导航精度 (RMS)优于3m,边缘区域精度也优于10m。
参考文献
1、海洋大地测量基准与水下导航_中国科学院_2022.06
2、我国海洋大地测量基准与海洋导航技术研究进展与展望_杨元喜2017