rt-thread多线程消息队列通信
前言:
这章学习 使用消息队列通信
1:环境
WIN11
STM32CubeMX 6.15.0
keil5.38
STM32F103C8T6
STLINKV2
USB转TTL(CH340)
2:代码
创建工程 参考 rt-thread点亮LED(详细步骤)
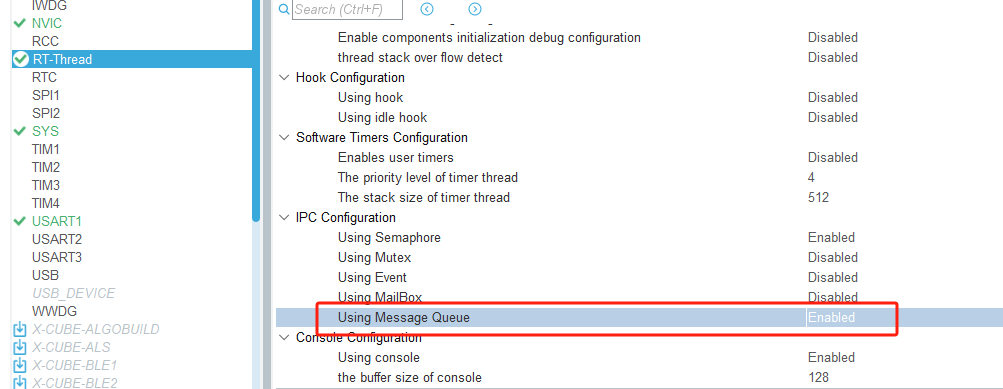
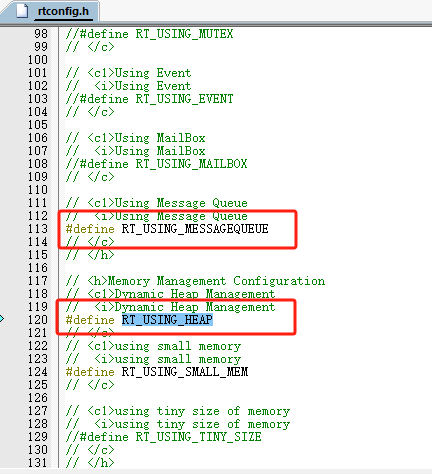
rt-thread 使能 消息队列 或到 rtconfig.h line113 去掉注释
使能堆栈 也一样
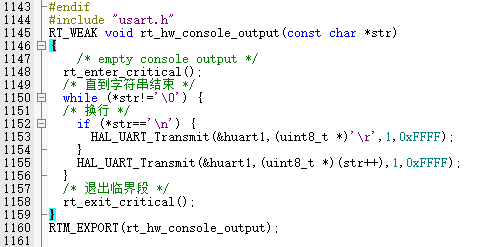
增加出串口输出
这章代码主要在
rt-thread多线程及按键处理
上修改而来,没有STM32CubeMX重新创建工程,只是用增加宏定义及代码
main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2025 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <rtthread.h> // RT-Thread核心头文件 rtthread.h //自行增加
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
//自行增加
static rt_thread_t led_thread = RT_NULL;
static void led_thread_entry(void* parameter);static rt_thread_t send_thread_1 = RT_NULL;
static void send_thread_entry_1(void* parameter);static rt_thread_t send_thread_2 = RT_NULL;
static void send_thread_entry_2(void* parameter);static rt_thread_t recv_thread = RT_NULL;
static void recv_thread_entry(void* parameter);#define LED_GPIO_Port GPIOC
#define LED_Pin GPIO_PIN_13#define KEY_GPIO_Port GPIOA //pa1-pa4
#define KEY1_Pin GPIO_PIN_1
#define KEY2_Pin GPIO_PIN_2
#define KEY3_Pin GPIO_PIN_3
#define KEY4_Pin GPIO_PIN_4#ifdef RT_USING_MESSAGEQUEUE //在 rtconfig.h line113 定义
static rt_mq_t system_mq = RT_NULL;#define MSG_MAX_SIZE 64
#define MSG_MAX_NUM 10typedef struct {rt_uint32_t msgtype;rt_uint32_t timestamp;rt_uint32_t msgcount;
} msg_t;typedef struct {char t1;rt_uint32_t timestamp;
} msg_tt;#define RT_SETUP_MSG_QUEUE
#endif//#define USE_KEY_PRESS_THREAD //按键检测线程开启/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
////自行增加
int my_rt_thread_init(void){led_thread = /* 线程控制块指针 */rt_thread_create( "led", /* 线程名字 */led_thread_entry, /* 线程入口函数 */RT_NULL, /* 线程入口函数参数 */512, /* 线程栈大小 */3, /* 线程的优先级 */20); /* 线程时间片 *//* 启动线程,开启调度 */if (led_thread != RT_NULL)rt_thread_startup(led_thread);elsereturn -1;}static void led_thread_entry(void* parameter)
{static uint32_t unum =0;while (1){//rtconfig.h 有定义 // <o>OS tick per second
// <i>Default: 1000 (1ms)
//#define RT_TICK_PER_SECOND 1000 //1000 == 1S 500= 0.5秒HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_SET);rt_thread_delay(500); /* 延时 500 个 tick */rt_kprintf("led_thread running on[%d]==>\r\n",unum);HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_RESET);rt_thread_delay(500); /* 延时 500 个 tick */rt_kprintf("led_thread running off[%d]<==\r\n",unum++);rt_thread_delay(3000); //延长时间}
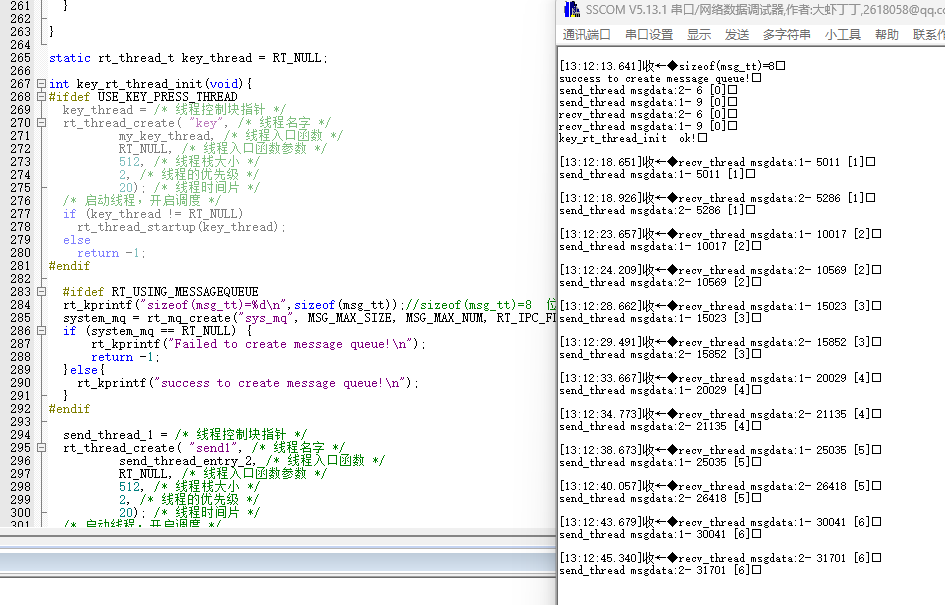
}static void send_thread_entry_1(void* parameter){uint32_t send_count =0;while(1){#ifdef RT_SETUP_MSG_QUEUEmsg_t msg;while(1){msg.msgtype = 1;msg.timestamp = rt_tick_get();msg.msgcount = send_count;rt_err_t t =rt_mq_send(system_mq, &msg, sizeof(msg_t));if(t != RT_EOK){rt_kprintf("sensor_thread rt_err_t: %d [%d]\n", (int)t,send_count);}else{rt_kprintf("send_thread msgdata:1- %d [%d]\n",msg.timestamp,send_count);}++send_count;rt_thread_mdelay(5000); // 每2秒采集一次}#elsert_kprintf("log_thread_entry on[%d]==>\r\n",send_count++);rt_thread_delay(5000); //延长时间#endif}}static void send_thread_entry_2(void* parameter){uint32_t send_count =0;while(1){#ifdef RT_SETUP_MSG_QUEUEmsg_t msg;while(1){msg.msgtype = 2;msg.timestamp = rt_tick_get();msg.msgcount = send_count;rt_err_t t =rt_mq_send(system_mq, &msg, sizeof(msg_t));if(t != RT_EOK){rt_kprintf("sensor_thread rt_err_t: %d [%d]\n", (int)t,send_count);}else{rt_kprintf("send_thread msgdata:2- %d [%d]\n",msg.timestamp,send_count);}++send_count;rt_thread_mdelay(5277); // 每2秒采集一次}#elsert_kprintf("log_thread_entry on[%d]==>\r\n",send_count++);rt_thread_delay(5000); //延长时间#endif}}static void recv_thread_entry(void* parameter){uint32_t tcount =0;while(1){#ifdef RT_USING_MESSAGEQUEUEuint8_t buffer[MSG_MAX_SIZE];while (1) {// 接收消息(永久等待)rt_err_t t = rt_mq_recv(system_mq, buffer, MSG_MAX_SIZE, RT_WAITING_FOREVER);if(t == RT_EOK){msg_t* pmsg = (msg_t*)buffer;rt_kprintf("recv_thread msgdata:%d- %d [%d]\n",pmsg->msgtype,pmsg->timestamp,pmsg->msgcount);}else{rt_kprintf("recv_thread rt_err_t: %d\n", (int)t);}//rt_thread_mdelay(10); // }#elsert_kprintf("recv_thread_entry on[%d]==>\r\n",tcount++);rt_thread_delay(5000); //延长时间#endif }
}uint8_t Key_Scan(uint8_t key)
{static uint8_t key_up = 1; // 按键松开标志(1=松开)if (key_up && (key == 0)) // 按键按下(低电平)且之前处于松开状态{rt_thread_delay(20); // 延时消抖(需自行实现延时函数)if (key == 0) // 再次检测确认按下{key_up = 0; // 标记按键按下return 1; // 返回按下状态}}else if (key == 1) // 按键松开(高电平){key_up = 1; // 标记按键松开}return 0; // 未按下或消抖中
}static void my_key_thread(void* parameter){while(1){// 检测各按键状态// HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); //Key_Scan(HAL_GPIO_GET(KEY1_PORT, KEY1_PIN))if (Key_Scan(HAL_GPIO_ReadPin(KEY_GPIO_Port, KEY1_Pin)) == 1){// K1按下,执行操作(例如点亮LED)rt_kprintf("key_thread KEY1 DOWN=>UP\r\n ");}if (Key_Scan(HAL_GPIO_ReadPin(KEY_GPIO_Port, KEY2_Pin)) == 1){// K1按下,执行操作(例如点亮LED)rt_kprintf("key_thread KEY2 DOWN=>UP\r\n ");}if (Key_Scan(HAL_GPIO_ReadPin(KEY_GPIO_Port, KEY3_Pin)) == 1){// K1按下,执行操作(例如点亮LED)rt_kprintf("key_thread KEY3 DOWN=>UP\r\n ");}if (Key_Scan(HAL_GPIO_ReadPin(KEY_GPIO_Port, KEY4_Pin)) == 1){// K1按下,执行操作(例如点亮LED)rt_kprintf("key_thread KEY4 DOWN=>UP \r\n");}rt_thread_delay(200);}}static rt_thread_t key_thread = RT_NULL;int key_rt_thread_init(void){
#ifdef USE_KEY_PRESS_THREAD key_thread = /* 线程控制块指针 */rt_thread_create( "key", /* 线程名字 */my_key_thread, /* 线程入口函数 */RT_NULL, /* 线程入口函数参数 */512, /* 线程栈大小 */2, /* 线程的优先级 */20); /* 线程时间片 *//* 启动线程,开启调度 */if (key_thread != RT_NULL)rt_thread_startup(key_thread);elsereturn -1;
#endif #ifdef RT_USING_MESSAGEQUEUErt_kprintf("sizeof(msg_tt)=%d\n",sizeof(msg_tt));//sizeof(msg_tt)=8 位4字节对齐 =16位8字节对齐 =5 为1字节对齐system_mq = rt_mq_create("sys_mq", MSG_MAX_SIZE, MSG_MAX_NUM, RT_IPC_FLAG_FIFO);if (system_mq == RT_NULL) {rt_kprintf("Failed to create message queue!\n");return -1;}else{rt_kprintf("success to create message queue!\n");}
#endifsend_thread_1 = /* 线程控制块指针 */rt_thread_create( "send1", /* 线程名字 */send_thread_entry_2, /* 线程入口函数 */RT_NULL, /* 线程入口函数参数 */512, /* 线程栈大小 */2, /* 线程的优先级 */20); /* 线程时间片 *//* 启动线程,开启调度 */if (send_thread_1 != RT_NULL)rt_thread_startup(send_thread_1);elsereturn -1;send_thread_2 = /* 线程控制块指针 */rt_thread_create( "send2", /* 线程名字 */send_thread_entry_1, /* 线程入口函数 */RT_NULL, /* 线程入口函数参数 */512, /* 线程栈大小 */2, /* 线程的优先级 */20); /* 线程时间片 *//* 启动线程,开启调度 */if (send_thread_2 != RT_NULL)rt_thread_startup(send_thread_2);elsereturn -1;recv_thread = /* 线程控制块指针 */rt_thread_create( "recv1", /* 线程名字 */recv_thread_entry, /* 线程入口函数 */RT_NULL, /* 线程入口函数参数 */512, /* 线程栈大小 */1, /* 线程的优先级 */40); /* 线程时间片 *//* 启动线程,开启调度 */if (recv_thread != RT_NULL)rt_thread_startup(recv_thread);elsereturn -1;rt_kprintf("key_rt_thread_init ok!\n");return 0;
}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *///自行增加//my_rt_thread_init();key_rt_thread_init();/* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *///自行增加rt_thread_delay(500); /* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */3:结果 如果对你又帮助,麻烦点个赞,加个关注
demo地址
demo md5:e376bfff8b277e6dbf6958d0277f3531
学会了MESSAGEQUEUE 那么 MAILBOX 更简单了
却别在于 MESSAGEQUEUE 消息可以变长,不超过最大长度就行
MAILBOX 定长
MESSAGEQUEUE MAILBOX 都支持 mpmc
一般用mpsc就可以了,