【析精】Landmark-Guided Subgoal Generation in Hierarchical Reinforcement Learning
Landmark-Guided Subgoal Generationin Hierarchical Reinforcement Learning
基于地标指导的层次强化学习中的子目标生成
评价:
面对状态多变任务复杂奖励稀疏的环境,HRL是一个不错的选择。面对上层网络需要为下层网络输出子目标。因为会有了一个V(状态,子目标)的价值函数用于评估子目标的好坏。其次子目标的是如何设定的呢?在本文中根据覆盖度和新颖度设计了一批“地标“,也可以看作是子目标的候选集。通过最短路径的方法,获得最紧急而非距离最近的地标点,记为ltsell_t^{sel}ltsel.它可能距离当前状态过远,直接作为子目标会导致低层策略难以达成。生成伪地标 gtpseudog_t^{pseudo}gtpseudo,将其投影到当前状态的邻域.
策略模型分为高层策略和低层策略。两个模型都是TD3,独立参数不共享。高层策略输入状态sts_tst,输出子目标gtg_tgt,这里的子目标可分为绝对子目标和相对子目标。低层网络输入当前状态+子目标,输出原子动作a_t. 在奖励方面,低层网络获得即使奖励,而高层网络在时间m后获得轨迹奖励。低层是每步更新,高层是mod m=0的时候更新。
摘要
目标条件化的<font =color=blue>分层强化学习(hierarchical reinforcement learning,HRL)在解决复杂和长时程的强化学习任务方面显示出有希望的结果。然而,目标条件化HRL中高级策略的动作空间通常很大,因此导致探索不足,训练效率低下。
在本文中,我们提出了由地标引导的分层强化学习( HIerarchical reinforcement learning Guided by Landmark,HIGL),这是一个新颖的框架,用于通过地标指导减少动作空间的高级策略训练,即探索有前景的状态。HIGL的关键组成部分是两部分:(a) 采样对探索有信息的地标和(b) 鼓励高级策略生成一个子目标以选择的地标为目标。(a)方面,我们考虑两个标准:覆盖整个已访问状态空间(即,状态的分散度)和状态的新颖性(即,状态的预测误差)。对于(b),我们选择一个地标作为图中节点为地标的最短路径中的第一个地标。我们的实验表明,由于由地标引导的高效探索,我们的框架在各种控制任务上优于先前的技术。
一、背景
HRAC(Hierarchical Reinforcement Learning with Adjacency Constraint)是一种基于邻接约束子目标的分层强化学习算法,核心思想是把高层的子目标空间从整个状态空间限制到“当前状态 k 步可达的局部区域”,从而减少高层策略的探索难度,同时给底层策略提供更有效的学习信号
| 模块 | 说明 |
|---|---|
| 邻接约束(Adjacency Constraint) | 高层策略只能输出当前状态 sts_tst 的 k 步可达区域(如曼哈顿距离 k 以内的状态)作为子目标。 |
| 分层结构 | 高层策略 πh\pi_hπh 选择子目标 gt∈Adj(st,k)g_t \in \text{Adj}(s_t, k)gt∈Adj(st,k),底层策略 πl\pi_lπl 执行原始动作达成 gtg_tgt。 |
| 优势 | 高层探索空间由全局 S\mathcal{S}S 缩小到 Adj(st,k)\text{Adj}(s_t, k)Adj(st,k),样本复杂度大幅降低。 |
与其他方法比较
| 方法 | 子目标空间 | 探索效率 | 典型场景 |
|---|---|---|---|
| HIRO | 全局状态空间 | 低(需探索整个空间) | 连续控制 |
| HAC | 全局状态空间 + HER | 中(利用后见经验) | 稀疏奖励任务 |
| HRAC | k 步邻接区域 | 高(局部探索) | 迷宫、导航等离散/连续任务 |
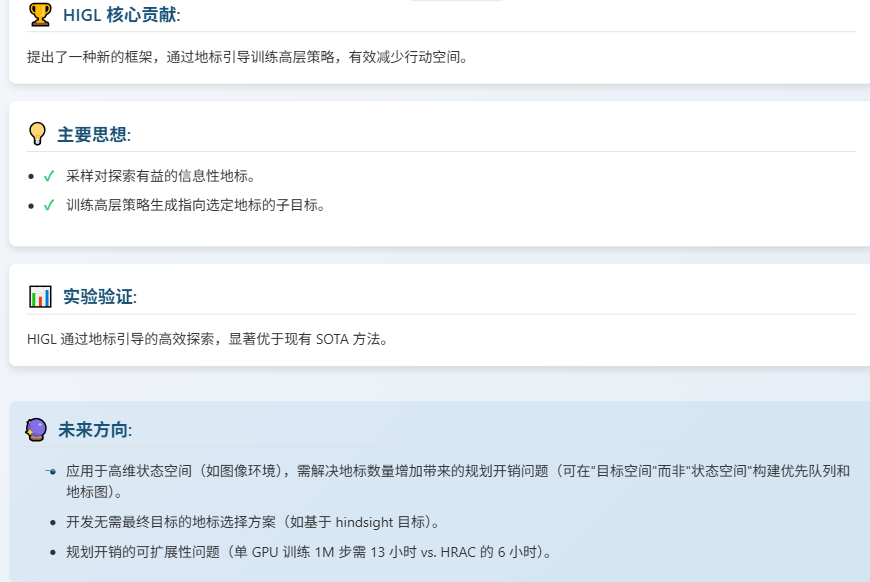
1.1 HIGL核心思想:基于地标的引导
我们的核心想法很简单:与其让高层策略在茫茫状态空间中瞎转悠,不如给它指明几个有希望的路标,也就是我们说的地标。HIGL主要有两块关键内容
🍭第一,怎么采样这些地标?
我们考虑了两个标准:一是覆盖度,确保地标能代表已探索区域的广度;二是新颖性,鼓励探索那些没见过的新奇状态。
🍭第二,有了地标,怎么引导高层策略去生成子目标呢?
我们会构建一个图,把当前状态、目标和所有地标都放进去,然后用最短路径算法找出到达最终目标的第一站,也就是最紧急的那个地标。
接着,我们就训练高层策略,让它努力生成指向这个选定地标的子目标。
1.2 HIGL框架概览
循环:
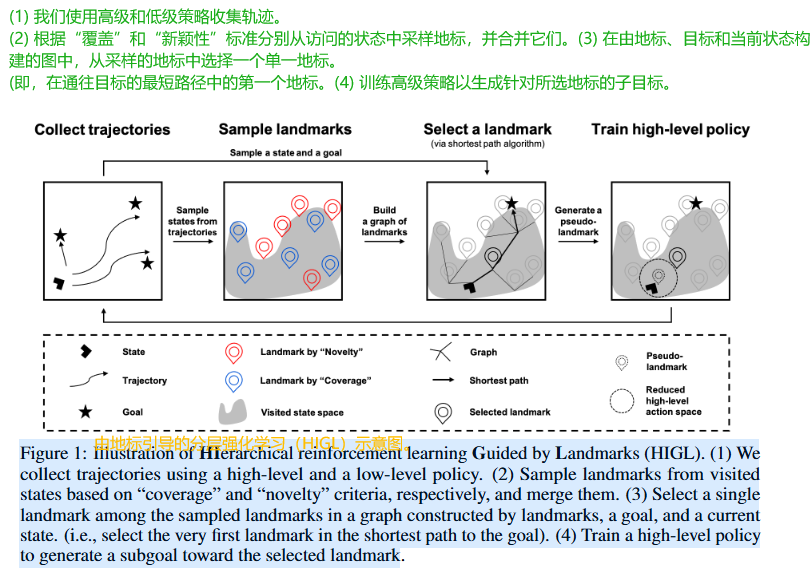
- 轨迹收集: 使用高低层策略交互环境。
智能体通过高阶和低阶策略在环境中跑起来,收集数据轨迹。
- 地标采样: 基于"覆盖度"和"新颖性"标准,从访问过的状态中采样地标并合并。
我们从这些轨迹里,根据前面说的覆盖度和新颖性标准,挑选出一批有代表性的地标,并把它们合并起来。
覆盖度标准:使用 FPS 算法选择在状态空间中尽可能分散的地标,确保覆盖整个探索区域
新颖性标准:基于RND预测误差选择新颖状态作为地标 - 地标选择: 在由地标、目标和当前状态构建的图中,选择最短路径上的第一个地标作为下一个目标。
接着,我们构建一个图,节点包括当前状态、最终目标以及我们选出来的所有地标。
在这个图上,我们用最短路径算法,比如价值选代,来规划从当前状态到最终目标的最佳路径。 - 高层策略训练: 训练高层策略生成指向所选地标的子目标
我们选择这条路径上离当前状态最近的那个地标,作为下一个要引导的子目标。
通过不断地收集、采样、选择和训练,智能体就能越来越高效地完成任务了。
💡 既然有了最短路径算法,为啥还要采用人工智能的方法进行AI训练呢?
- 最短路径算法只能提供静态路径规划
- AI训练使高层策略能够:
(1) 动态适应环境变化
(2) 学习生成可达的子目标(通过伪地标机制)
(3) 结合探索与利用的平衡- 最终效果优于纯规划方法,如实验显示HIGL在Ant Maze任务中成功率65.1%,远高于HRAC的17.6%
二、Preliminaries
我们用有限时间、目标条件化的马尔可夫决策过程(MDP)[47]来表述控制任务,定义为一个元组(S,G,A,p,r,γ,H)(\mathcal{S, G, A}, p, r, γ, H)(S,G,A,p,r,γ,H),其中S是状态空间,G是目标空间,A是动作空间,p (s′|s, a) 是转移动态,r (s, a) 是奖励函数,γ ∈ [0, 1) 是折扣因子,H 是时间范围。
2.1 Goal-conditioned HRL.
目标条件化的HRL。
我们考虑一个由两个层次组成的框架:高级策略π(g∣s;θhigh)π(g|s;θ_{high})π(g∣s;θhigh)和低级策略π(a∣s,g;θlow)π(a|s, g; θ_{low})π(a∣s,g;θlow),其中每个策略分别由神经网络参数化,其参数分别为θhighθ_{high}θhigh和θlowθ_{low}θlow。在每个时间步t,高级策略生成高级动作,即子目标gt∈Gg_t \in \mathcal{G}gt∈G.要么 从其策略gt∼π(g∣st;θhigh)g_t∼π(g|s_t;θ_{high})gt∼π(g∣st;θhigh)中采样(当t≡0(mod k)时)。要么使用预定义的目标转移过程gt=h(gt−1,st−1,st)g_t=h(g_{t−1},s_{t−1},s_t)gt=h(gt−1,st−1,st),即对于相对子目标方案[30,56],h(gt−1,st−1,st)=gt−1+st−1−sth(g_{t−1},s_{t−1},s_t)=g_{t−1}+s_{t−1}−s_th(gt−1,st−1,st)=gt−1+st−1−st;对于绝对子目标方案,h(gt−1,st−1,st)=gt−1h(g_{t−1},s_{t−1},s_t)=g_{t−1}h(gt−1,st−1,st)=gt−1。低级策略观察状态sts_tst和目标gtg_tgt,并执行低级原子动作at∼π(a∣st,gt;θlow)a_t∼π(a|s_t,gt;θ_{low})at∼π(a∣st,gt;θlow)。然后,高级策略的奖励函数如下所示为来自环境的m个外部奖励之和:

 表示大小为m的轨迹段。
表示大小为m的轨迹段。
策略执行频率:
- 高级策略:每m个时间步生成一次子目标(当t ≡ 0 mod m时)
- 低级策略:每个时间步t都生成原子动作
奖励机制流程:
a) 当t ≡ 0 mod m时:
- 高级策略生成子目标g_t
- 低级策略开始执行m步轨迹τt,m=(st,gt,at),...,(st+m−1,gt+m−1,at+m−1)τ_{t,m} = {(s_t,g_t,a_t),...,(s_{t+m-1},g_{t+m-1},a_{t+m-1})}τt,m=(st,gt,at),...,(st+m−1,gt+m−1,at+m−1)
b) 在t+m时刻:
- 计算这m步的环境奖励总和 rhigh(τt,m)=Σi=0m−1r(si,ai)r^{high}(τ_{t,m}) = Σ_{i=0}^{m-1} r(s_i,a_i)rhigh(τt,m)=Σi=0m−1r(si,ai)
- 该奖励作为高级策略在时间t决策的延迟奖励
| 组件 | 输入(Input) | 输出(Output) | 频率 |
|---|---|---|---|
| 高层策略 | 当前状态 sts_tst | 子目标 gtg_tgt (相对/绝对) | 每 m 步 |
| 低层策略 | 当前状态 sts_tst + 子目标 gtg_tgt | 原子动作 | 每步(t) |
在目标条件化分层强化学习(HRL)中, 相对子目标(Relative Subgoals) 和 绝对子目标(Absolute Subgoals) 是两种不同的设计范式,实际应用中通常需要根据任务特性选择其中一种,而非同时使用。以下是两者的对比和选择依据:
特性 相对子目标 绝对子目标 定义 指定相对于当前状态的偏移量(如“向右移动2米”) 指定全局坐标系中的目标(如“到达坐标(5,5)”) 高层策略输出 gt=Δs=st+k−stg_t =\Delta_s=s_{t+k}-s_tgt=Δs=st+k−st gt=st+kg_t=s_{t+k}gt=st+k(目标状态) 低层奖励函数 rlow=−∣∣φ(st+1−st)−gt∣∣r^{low} =-|| \varphi (s_{t+1}-s_t) -g_t ||rlow=−∣∣φ(st+1−st)−gt∣∣ rlow=−∣∣φ(st+1−gt)∣∣r^{low} =- || \varphi(s_{t+1}-g_t)||rlow=−∣∣φ(st+1−gt)∣∣ 适用场景 动态环境、连续控制任务(如机器人运动) 静态环境、离散目标(如导航到固定点) 探索效率 更适应局部变化,适合长轨迹优化 更适合全局目标明确的场景 实现复杂度 需设计合理的偏移量约束 需确保目标在可达空间内
高级策略的目标是通过为低级策略提供与目标空间goal spaceG\mathcal{G}G中的距离成比例的内在奖励,来最大化rhighr^{high}rhigh的期望总和。具体来说,在相对子目标方案[30, 56]中,低级策略的奖励函数定义为:

φ:S→G\varphi :\mathcal{S \to G}φ:S→G :是一个将状态映射到目标的目标映射函数。相反,如果用绝对子目标方案替换,则奖励函数如下所示:

2.2 Random network distillation.
随机网络蒸馏。
探索算法的一行引入了状态的新颖性,这是通过 预测误差(prediction errors)[ 3, 14, 36, 41 ]、访问计数(visit-counts )[ 2, 35, 49]或状态熵估计(state entropy estimate)[ 13, 20, 29, 42]计算的。一个众所周知的方法是随机网络蒸馏(Random network distillation,RND)[ 3],它使用神经网络的预测误差作为新颖性得分。具体来说,设fff是一个具有固定参数θˉ\bar{\theta}θˉ的神经网络,而f^\hat{f}f^是由θ参数化的神经网络。RND通过最小化f的预期均方预测误差 Es∼B‖f^(s;θ)−f(s;θˉ)‖2\mathbb{E}_{s∼\mathcal{B}}‖ \hat{f} (s; θ) − f (s; \bar{θ})‖_2Es∼B‖f^(s;θ)−f(s;θˉ)‖2 来更新θ。然后,将状态s的新颖性得分定义为:

对于与预测网络θ训练时所使用的状态不同的新奇状态,新颖性得分n(s)可能更高。
2.3 Adjacency network.
邻接网络。
设dst(s,s′)d_{st}(s, s′)dst(s,s′)是从状态s到状态s′的最短转移距离,即dst(s,s′)d_{st}(s, s′)dst(s,s′)是最佳代理从s到达s′所需的期望步数。为了估计dstd_{st}dst,张等人引入了一个由参数φ定义的邻接网络ψ,该网络区分两个状态是否为k步相邻。[56] 张等人介绍了一个邻接网络ψ,其参数化为φ,用于区分两个状态是否为k步相邻。该网络通过最小化下面的 对比式损失contrastive-like loss 来 学习从目标空间到邻接空间的映射:

其中δ>0δ>0δ>0是嵌入之间的边缘,εkε_kεk是一个缩放因子,而l∈{0,1}l∈\{0,1\}l∈{0,1}表示从存储探索状态的邻接信息的k步邻接矩阵M中导出的k步邻接性标签。方程(5)对相邻状态嵌入(l=1)(l=1)(l=1)惩罚较大的欧几里得距离,而非相邻状态嵌入(l=0)(l=0)(l=0)则惩罚较小的欧几里得距离。然后可以估计最短转移距离如下:

💡 状态s,s′s,s's,s′的维度不唯一,是仅靠位置分量计算状态之间的距离吗?
在HIGL框架中,邻接网络(Adjacency Network)估计的状态间距离 dst(s,s′)d_{st}(s,s')dst(s,s′) 并非仅基于位置分量计算,而是通过以下方式处理多维状态特征.
(1)邻接网络的核心设计
邻接网络 ψϕ\psi_{\phi}ψϕ 是一个神经网络,其输入是目标空间 G\mathcal{G}G 的嵌入(而非原始状态空间 S\mathcal{S}S),输出是用于距离度量的低维嵌入。具体流程:
- 状态到目标的映射:
通过函数φ:S→G\varphi :\mathcal{S \to G}φ:S→G 将状态 s 映射到目标空间 g=φ(s)g=\varphi(s)g=φ(s)。
例如:在Ant Maze中,φ(s)\varphi(s)φ(s) 可能提取 (x,y)坐标;在机械臂任务中可能提取末端执行器位置。- 目标空间的距离估计:
邻接网络计算两个目标 gi,gjg_i,g_jgi,gj的嵌入距离:
其中 通过对比学习优化(公式5),迫使相邻状态(k-步可达)的嵌入距离趋近于 εk\varepsilon_kεk 。(2)多维状态特征的处理
若状态 s 包含位置以外的特征(如速度、传感器数据等),HIGL通过以下方式解决:
- 特征选择:
映射函数 φ\varphiφ通常手动设计或自动学习,仅提取与任务相关的关键特征。
例如:在Ant Maze中,即使状态包含关节角度、速度,φ\varphiφ 可能仅保留 坐标。
学习方案:若使用自动编码器学习 φ\varphiφ,可通过辅助目标(如重构损失)约束嵌入空间。- 距离的语义性:
邻接网络的距离反映的是控制相关性(如可达性),而非纯几何距离。
两个状态若在动力学上容易相互转移(如相邻位置且速度方向一致),即使几何距离较远,也可能被判定为“邻接”。(3)与低级策略的协同
低级策略的价值函数 V(s,g)V(s,g)V(s,g)进一步修正距离估计:
- 在构建地标图时,边权重为 : V(s1,φ(s2−s1))V(s_1,\varphi(s_2-s_1))V(s1,φ(s2−s1))(相对子目标)或 V(s1,φ(s2))V(s_1,\varphi(s_2))V(s1,φ(s2))(绝对子目标)。

三、HIGL
3.1 地标采样
Coverage-based sampling基于覆盖的采样。
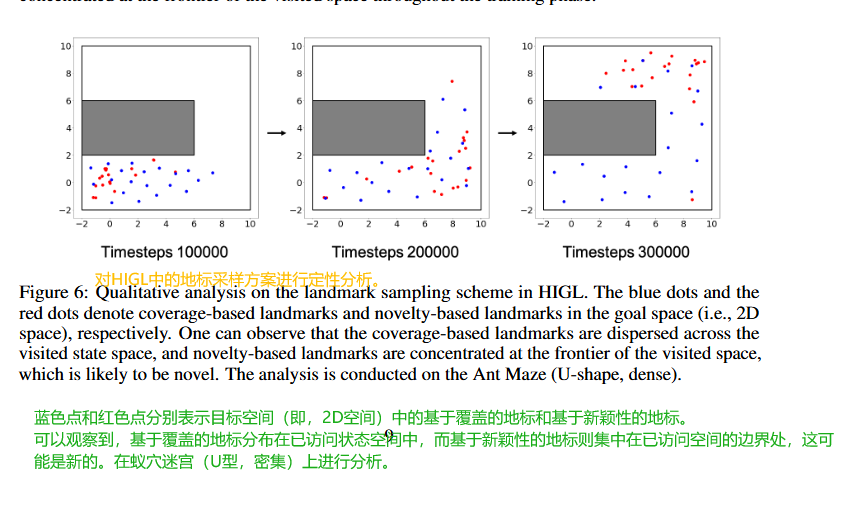
我们提出从重放缓冲区( replay buffer)B\mathcal{B}B中采样覆盖广泛访问状态的地标。为此,我们利用最远点采样(Farthest Point Sampling,FPS)[51],它从B中采样一个状态池,并选择在该池中尽可能远离彼此的状态。具体来说,我们通过应用 FPS 来采样一组基于覆盖的地标Lcov={licov}iMcov=1L^{cov} = \{l^{cov}_i\}^{Mcov}_i=1Lcov={licov}iMcov=1,在目标空间中测量两个状态s和s′之间的距离为∣∣ϕ(s)−ϕ(s′)∣∣2||ϕ(s) − ϕ(s′)||_2∣∣ϕ(s)−ϕ(s′)∣∣2,遵循黄等人。[15]。我们注意到 FPS 隐式地在已访问状态空间的前沿采样状态,这意味着基于覆盖的地标也隐含着值得探索的有希望的状态(参见图6以获得支持的实验结果)。
这里的距离不是直接在状态空间算,而是在一个叫做目标空间的映射空间里计算,用的是欧氏距离。这种方法的好处是,它能自动帮你找到那些位于已探索状态空间边界的点,这些点往往意味着新的可能性,或者说,它们本身就可能是一些不错的探索方向。
Novelty-based sampling.基于新颖性的采样。
为了显式地采样新地标,我们提出在环境交互过程中存储遇到的新状态并将其用作地标。为此,我们引入了一个固定大小为K的优先队列priority queue Q,其中每个元素(状态)的优先级定义为(4)中的状态n(s)的新颖性;队列将状态s以n(s)的优先级存储在Q中。这里的一个重要问题是,随着探索的进行,状态s的新颖性会降低,因此Q中存储的状态的优先级应不断更新。因此,我们提出了一种基于相似度的更新方案,该方案丢弃与新遇到的状态相似的先前存储样本。具体来说,当我们遇到一个状态s时,我们测量s在所有已存储状态s’ ∈ Q之间的相似度,并丢弃相似状态,即{s′∈Q:∣∣ϕ(s)−ϕ(s′)∣∣2<λ}\{s' ∈ Q : ||ϕ(s) − ϕ(s′)||_2 < λ\}{s′∈Q:∣∣ϕ(s)−ϕ(s′)∣∣2<λ},其中λ是相似度阈值。然后我们将一个状态s存储在Q中,并从Q中采样一组新颖性基地标记Lnov={linov}iMnov=1L^{nov} = \{l^{nov}_i \}^{Mnov}_i=1Lnov={linov}iMnov=1。

每个状态进入这个队列Q时,都有一个优先级,这个优先级就是它的新颖性得分n(s),我们用的是 RND 随机网络蒸馏的方法来衡量这个得分。当智能体遇到一个新的状态s时,我们会先检查一下队列里有没有跟它长得太像的家伙,也就是相似度低于某个阈值入的状态。
💡 Why ?在HIGL框架中,新颖性采样只与优先级队列 Q中的状态比较(而非所有历史状态)
- 计算效率的优化,复杂度降低:与所有历史状态比较(可能达数百万次)的复杂度是 O(N)O(N)O(N),而与固定大小 的队列比较复杂度是 O(1)O(1)O(1).
- 避免重复存储相似状态.优先级队列的淘汰机制:队列 Q 是一个最大堆,始终保留当前最新颖的 K个状态。当新状态 s 比队列中最不新颖的状态更独特时,才会替换它。
- 动态适应探索进展
- 新颖性的相对性:
随着训练进行,早期新颖的状态可能变得普通。队列机制通过动态更新,始终反映当前最值得探索的区域。
例子:在迷宫任务中,起点附近的状态在训练后期不再新颖,会被自动移出队列。- RND的配合:
队列中状态的优先级由RND预测误差 决定,误差越大越新颖。队列更新时:
- 移除相似旧状态(基于状态嵌入距离)
- 插入新状态(基于RND误差).这种双重标准确保地标同时满足:
空间分散性(覆盖度)
时间新颖性(预测误差)
3.2 地标选择
构建一个图。
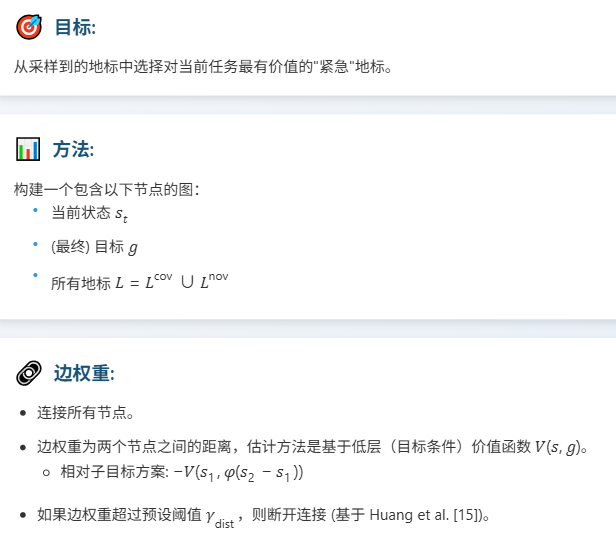
对于地标选择,我们构建一个图,其节点包括当前状态sts_tst、(最终)目标g 和地标L。🐸首先,我们将所有节点连接起来,并为每条边分配一个权重,该权重由两个节点之间的距离估计值函数V(s, g)给出,即对于相对子目标方案中的状态s1、s2s_1、s_2s1、s2,有−V(s1,ϕ(s2−s1))−V(s_1,ϕ(s_2−s_1))−V(s1,ϕ(s2−s1)),遵循先前的工作[9,15,34]。由于通过价值函数的距离估计是局部准确的,但对于远状态来说不可靠,因此我们遵循Huang等人,在相应边的权重大于预设阈值γdistγ_{dist}γdist时断开两个节点。[15].

规划。在构建图之后,我们运行最短路径规划算法以从当前状态sts_tst选择访问的最紧急的状态ltsell^{sel}_tltsel到目标ggg。由于一般价值迭代对于RL问题恰好是图上的最短路径算法,因此我们利用价值迭代作为最短路径规划,遵循黄等人先前的工作。[15].通过选择到达目标的最短路径中的第一个地标,HIGL可以专注于最紧急的地标,忽略可能与从当前状态到达目标无关的地标。
3.3 训练高层策略:伪地标
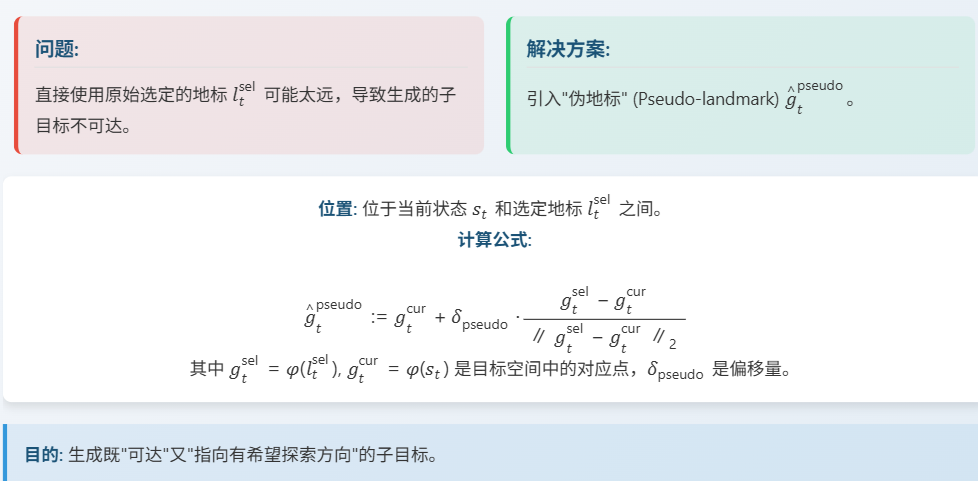
我们选出了最紧急的地标ltsell_t^{sel}ltsel。但是,直接用这个原始的地标去训练高层策略可能会有问题。这个地标可能是离当前状态st很远的,如果高层策略直接生成一个指向那么远地方的子目标,那低层策略可能根本没法一步到位,生成的子目标可能就是不可达的。这会导致低层策略收不到有效的奖励信号,学习就慢了。 为了解决这个问题,我们引入了一个巧妙的概念,叫做伪地标 Pseudo-landmark,记作g^tpseudo\hat{g}_t^{pseudo}g^tpseudo。它的位置不是直接用选定的地标ltsell_t^{sel}ltsel,而是在当前状态sts_tst和选定地标ItselI_t^{sel}Itsel之间找一个中间点。 这样一来,我们生成的伪地标既不会离当前状态太远,保证了可达性,又大致指向了那个有希望探索的原始地标方向。
3.4 训练高层策略:地标损失
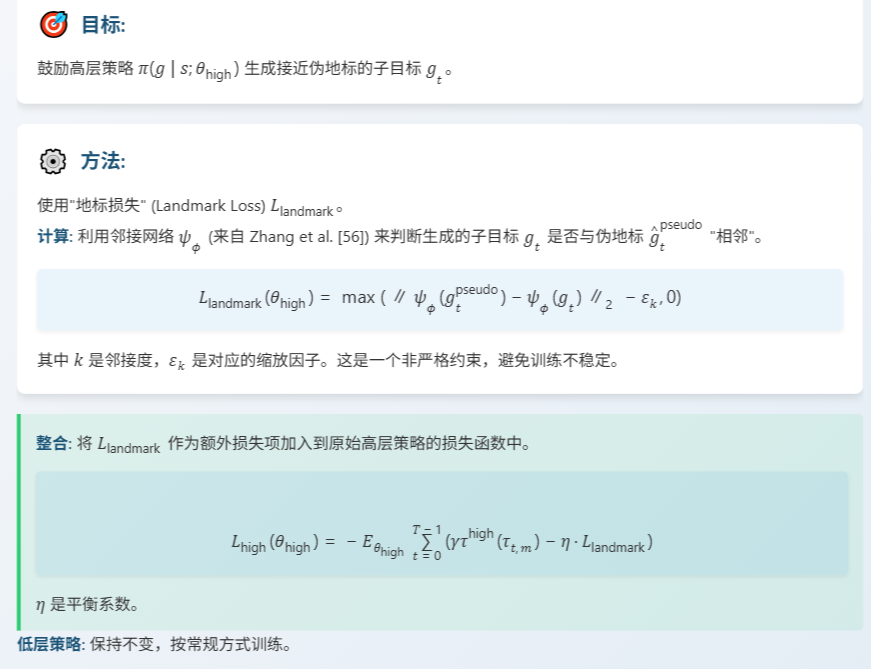
有了伪地标,我们怎么让高层策略去生成接近它的子目标呢?
我们设计了一个叫做地标损失 Landmark Loss 的东西,记作L landmark。这个损失函数的作用就是惩罚那些生成的子目标gtg_tgt离我们的伪地标g^tpseudo\hat{g}_t^{pseudo}g^tpseudo 太远的情况。
具体怎么衡量远不远呢?
我们用到了之前提到的邻接网络ψϕ\psi_{\phi}ψϕ。 这个网络可以判断两个目标在目标空间里是不是相邻的. 我们的地标损失就是计算生成的子目标gtg_tgt和伪地标g^tpseudo\hat{g}_t^{pseudo}g^tpseudo 经过ψϕ\psi_\phiψϕ 映射后的向量距离,如果这个距离 个阈值εk\varepsilon_kεk,就产生损失。注意,这里我们用的是一个非严格的约束,也就是 max(.,0)max(., 0)max(.,0),这样可以避免训练过程过于不稳定。我们把这个地标损失LlandmarkL_{landmark}Llandmark加入到原来高层策略的损失函数里,用一个系数η\etaη 来平衡它和原来的目标奖励。 这样,高层策略在学习的同时,也会受到这个损失的引导,努力生成更靠近伪地标的子目标。至于低层策略,我们保持不变,按原来的方式训练就行。
四、实验
在本节中,我们设计实验以回答以下问题:
- HIGL如何与最先进的HRL方法[56]在各种长时连续控制任务(见图3)上进行比较?
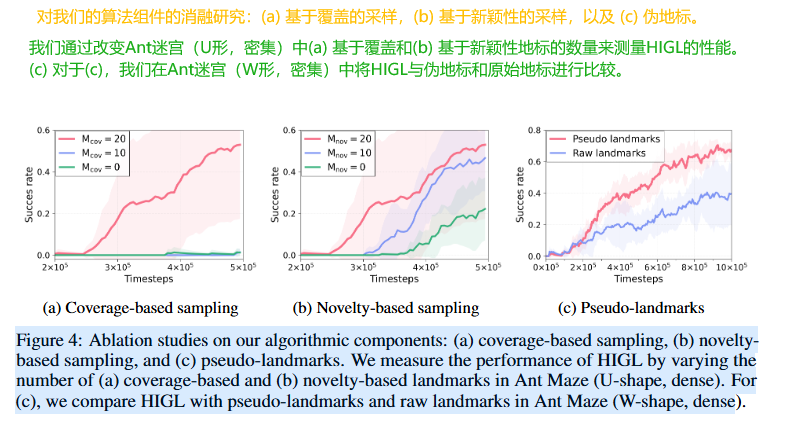
- 标志采样的覆盖范围和新颖性如何分别提高性能(见图4a,4b)?
- 伪地标如何影响性能,而不是使用原始选定的地标(见图4c)?
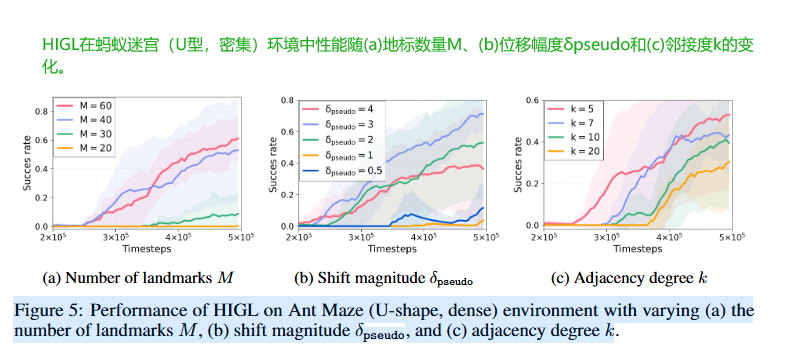
- 如何设置超参数:(1)地标数量M,(2)位移幅度δpseudo和(3)邻接度k如何影响性能(见图5a、5b、5c)?
4.1 实验设置:环境
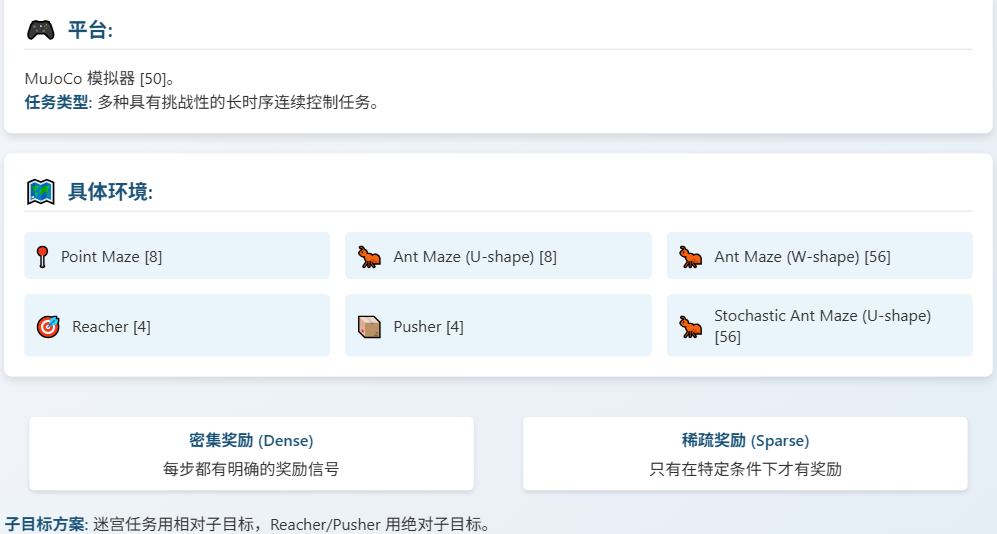
我们测试了 HIGL 在一系列具有挑战性的连续控制任务上的表现,包括经典的 Point Maze和 Ant Maze,有U型的也有 W 型的,还有 Reacher 和 Pusher 这两个机械臂任务。为了增加难度,我们还使用了带有随机噪声的 Stochastic Ant Maze。在奖励设置上,我们考察了密集奖励和稀疏奖励两种情况。密集奖励每一步都有反馈,而稀疏奖励只有在非常接近目标时才有奖励,这对探索能力要求更高。对于子目标方案,迷宫任务我们用了相对子目标,而 Reacher 和 Pusher 这种需要精确控制位置的任务,我们用了绝对子目标。
4.2 实验结果:与 SOTA 方法对比
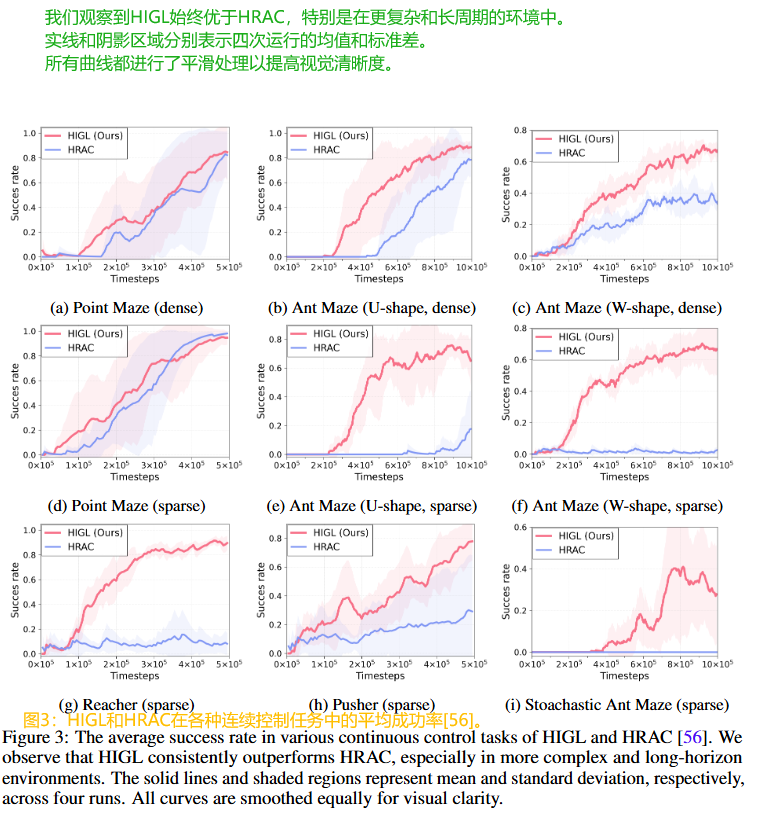
结论:
HIGL 在所有任务中均优于 HRAC,尤其在更复杂和长时序环境中优势明显。
原因分析:
- HIGL 考虑了状态的可达性和新颖性,而 HRAC 对所有邻近状态一视同仁。
- HIGL 通过规划识别出有希望探索的方向,并训练高层策略生成指向该方向的子目标。
显著提升: 例如,在 Ant Maze (U-shape, sparse) 任务中,HIGL 达到 65.1% 成功率,而 HRAC 仅为 17.6%。
鲁棒性: HIGL 在随机环境中也表现更好,且无需修改即可适用。
5.3 消融研究
组件有效性分析
-
覆盖度采样 (图4a):
使用覆盖度地标对性能有积极影响。它们作为通往新状态或本身就是有希望状态的路标。 -
新颖性采样 (图4b):
利用新颖性采样同样提升了性能。例如,仅使用 10 个新颖性地标就显著优于不使用。 -
伪地标 (图4c):
与直接使用原始选定地标相比,使用伪地标能获得更好的性能。因为伪地标同时满足"可达"和"指向有希望探索方向"两个特性。
超参数影响
-
地标数量 M (图5a):
增加地标数量通常能提高性能,因为能包含更多环境信息,且使图规划更可靠。 -
偏移量 δpseudoδ_{pseudo}δpseudo (图5b):
偏移量影响伪地标的位置。太小则高层策略倾向于生成靠近当前状态的子目标;太大则可能导致生成不可达的子目标,性能下降。 -
邻接度 k (图5c):
调整邻接度对超越 HRAC 的性能影响不大。但设置过大不合适,因为允许生成离伪地标很远的子目标,可能位于不可达区域。
4.4 定性分析:地标采样效果
- 覆盖度地标 (蓝点) 分散在已访问状态空间中。
- 新颖性地标 (红点) 集中在已访问空间的边界,这表明它们可能具有新颖性。
- 训练初期,由于智能体从左下角开始,覆盖度地标也集中在左下角。
- 随着训练进行,智能体探索范围扩大,覆盖度地标也更分散。
- 新颖性地标在整个训练阶段都集中在边界。
五、讨论与结论
六、HIGL 算法
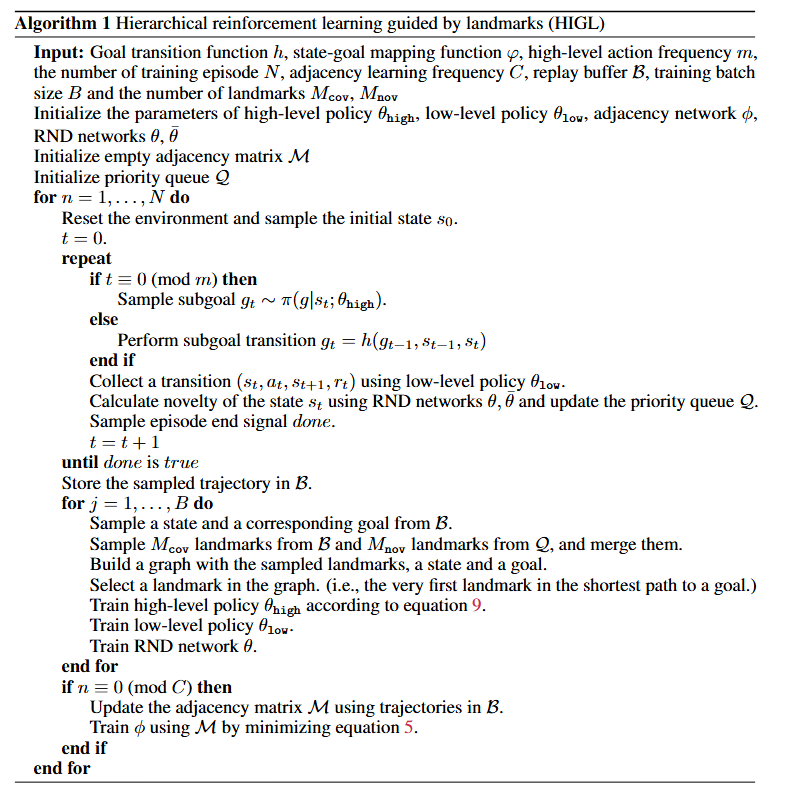
6.1 算法输入与初始化
| 变量 | 输入参数 |
|---|---|
| h | 子目标转换函数(相对/绝对方案) |
| φ | 状态到目标空间的映射函数 |
| m | 高层策略动作频率(每m步生成子目标) |
| N | 总训练步数 |
| C | 邻接网络更新频率 |
| B\mathcal{B}B | 回放缓冲区 |
| B | 训练批次大小 |
| M_cov, M_nov | 覆盖/新颖性地标数量 |
初始化:
- 策略网络:
- 高层策略 π_high:TD3算法,输出子目标 g_t
- 低层策略 π_low:TD3算法,输出原子动作 a_t
- 辅助网络:
- 邻接网络 ψφψ_φψφ:估计状态间可达性
- RND网络 (f,f^)(f, f̂)(f,f^):计算状态新颖性 n(s)=∣∣f^(s)−f(s)∣∣n(s) = ||f̂(s) - f(s)||n(s)=∣∣f^(s)−f(s)∣∣
- 存储结构:
- 回放缓冲区 B\mathcal{B}B:存储轨迹 (st,at,rt,st+1)(s_t, a_t, r_t, s_{t+1})(st,at,rt,st+1)
- 优先级队列 Q:维护高新颖性状态(最大堆,容量 K)
6.2 主训练循环(行3-24)
1. 环境交互阶段(行4-14)
(1) 子目标生成:
- 每 m 步(t % m == 0时):
- 高层策略生成子目标 gt∼πhigh(st)g_t \sim π_{high}(s_t)gt∼πhigh(st)
- 非 m 步时:
- 使用转换函数 gt=h(gt−1,st−1,st)g_t = h(g_{t-1}, s_{t-1}, s_t)gt=h(gt−1,st−1,st) 调整子目标
相对方案:gt=gt−1+(st−1−st)g_t = g_{t-1} + (s_{t-1} - s_t)gt=gt−1+(st−1−st)
绝对方案:gt=gt−1g_t = g_{t-1}gt=gt−1
- 使用转换函数 gt=h(gt−1,st−1,st)g_t = h(g_{t-1}, s_{t-1}, s_t)gt=h(gt−1,st−1,st) 调整子目标
(2) 动作执行与存储:
- 低层策略执行 at∼πlow(st,gt)a_t \sim π_{low}(s_t, g_t)at∼πlow(st,gt)
- 环境返回 (st+1,rt)(s_{t+1}, r_t)(st+1,rt),存入 B\mathcal{B}B
- 计算新颖性 n(s_t) 并更新队列 Q:
若 n(s_t) 高于 Q 中最小值或存在相似状态(∣∣φ(st)−φ(s′)∣∣<λ||φ(s_t) - φ(s')|| < λ∣∣φ(st)−φ(s′)∣∣<λ),替换旧状态
2. 训练阶段(行15-23)
(1)地标采样(行16):
- 覆盖性地标:从 B 中通过FPS算法采样 M_cov 个分散状态
- 新颖性地标:从 Q 中取 M_nov 个高新颖性状态
- 合并地标集 L = Lcov∪LnovL_{cov} ∪ L_{nov}Lcov∪Lnov
(2)地标选择与伪目标生成(行17-18):
- 构建地标图:节点为 st,g,L{s_t, g, L}st,g,L,边权重通过低级价值函数 V(s, g) 计算
最短路径规划选择最紧急地标 ltsell_t^{sel}ltsel,生成伪目标:
g^tpseudo=φ(st)+δpseudo⋅φ(ltsel)−φ(st)∣∣φ(ltsel)−φ(st)∣∣\hat{g}_t^{pseudo} = φ(s_t) + δ_{pseudo} \cdot \frac{φ(l_t^{sel}) - φ(s_t)}{||φ(l_t^{sel}) - φ(s_t)||}g^tpseudo=φ(st)+δpseudo⋅∣∣φ(ltsel)−φ(st)∣∣φ(ltsel)−φ(st)
(3)策略更新(行19-21):
- 高层策略:
优化TD3损失 + 地标损失 Llandmark=max(∣∣ψ(φ(gt))−ψ(φ(g^tpseudo))∣∣−εk,0)L_{landmark} = max(||ψ(φ(g_t)) - ψ(φ(\hat{g}_t^{pseudo}))|| - ε_k, 0)Llandmark=max(∣∣ψ(φ(gt))−ψ(φ(g^tpseudo))∣∣−εk,0)
目标:使生成子目标 g_t 靠近伪目标 - 低层策略:
标准TD3更新,奖励为子目标距离 -||φ(s_{t+1}) - g_t||$
(4)辅助网络更新(行22-23):
- 每 C 步更新邻接网络 ψ_φ:
从 B 采样状态对,用对比损失(公式5)优化 k-步可达性估计 - RND网络 f̂ 持续更新以最小化 ||f̂(s) - f(s)||
3. 关键设计分析
(1)地标机制的协同作用
- 覆盖性采样:确保地标覆盖已探索区域,避免遗漏。
- 新颖性采样:引导探索前沿,突破局部最优。
- 动态平衡:实验显示 M_cov = M_nov = 20 时效果最佳(Ant Maze)。
(2) 伪目标的必要性
- 解决可达性问题:原始地标可能过远(如 ltsell_t^{sel}ltsel在迷宫另一端),伪目标将其投影到当前状态的邻域(δpseudoδ_{pseudo}δpseudo控制步长)。
实验验证:图4c显示使用伪目标比原始地标成功率提升 >20%。
(3) 延迟奖励与分层训练
- 高层奖励延迟:每 m 步获得累计奖励,迫使高层学习长期规划。
- 低层即时反馈:每个时间步基于子目标距离调整,保证局部收敛。
4. 实现细节与超参数
(1)网络架构:
- 策略网络:3层MLP(300-300隐藏单元,ReLU)
- 邻接网络:4层MLP(128-128隐藏单元,输出32维嵌入)
(2)超参数:
- m = 20(Ant Maze),m = 5(Reacher)
- δpseudo=2.0δ_{pseudo} = 2.0δpseudo=2.0(迷宫),1.0(机械臂)
- λ = 0.1(相似性阈值),ε_k = 1.0(邻接尺度)
(3)训练加速:
- 早期阶段(前60k步)禁用伪目标(δpseudo=0δ_{pseudo} = 0δpseudo=0),避免不准确规划干扰。
5. 与其他HRL方法的对比优势
| 模块 | HIGL | 传统HRL(如HRAC) |
|---|---|---|
| 动作空间 | 地标引导的降维空间 | 原始子目标空间或固定邻域 |
| 探索效率 | 覆盖+新颖性双重引导 | 仅依赖随机探索或邻域采样 |
| 奖励设计 | 高层:延迟累计奖励 + 地标损失 | 高层:稀疏环境奖励 |
| 计算开销 | 需维护地标图和RND网络 | 仅需邻接网络 |
6. 局限性
- 规划成本:地标图最短路径搜索增加约50%训练时间(对比HRAC)。
- 状态依赖性:依赖 φ 的设计,若目标空间映射不佳(如高维图像),性能下降。
6.3 高层策略网络的优化
(1)优化目标:
- 主目标:最大化环境奖励的累计和(稀疏、长周期奖励)。
- 辅助目标:通过地标损失(Landmark Loss)引导子目标靠近伪地标(g^tpseudo\hat{g}_t^{pseudo}g^tpseudo )
(2)优化步骤:
-
数据收集:
高层每 m 步生成子目标 ,低层执行 m步轨迹
存储轨迹及累计奖励 rhigh(τt,m)r^{high}(\tau_{t,m})rhigh(τt,m) 到回放缓冲区 B\mathcal{B}B -
奖励计算:
环境奖励:直接使用累计奖励 rhigh(τt,m)r^{high}(\tau_{t,m})rhigh(τt,m) (稀疏信号)。
地标损失:L=max(∣∣ψϕ(φ(gt))−ψϕ(φ(g^tpseudo))∣∣2−εk,0)\mathcal{L} =\max(|| \psi_{\phi}(\varphi(g_t))- \psi_{\phi}(\varphi(\hat{g}_t^{pseudo}))||_2 -\varepsilon_k, 0)L=max(∣∣ψϕ(φ(gt))−ψϕ(φ(g^tpseudo))∣∣2−εk,0)
ψϕ\psi_{\phi}ψϕ:邻接网络,衡量子目标与伪地标的可达性距离 .
εk\varepsilon_kεk:邻接阈值(超参数)
(3)策略更新:
- 使用TD3算法优化高层策略,总损失函数为:L=−E[γrhigh(τt,,−ηLlandmark)]\mathcal{L}=-\mathbb{E}[\gamma r^{high}(\tau_{t,,}-\eta \mathcal{L}_{landmark})]L=−E[γrhigh(τt,,−ηLlandmark)]
η\etaη 平衡系数(默认 =20)。 - 地标损失作为正则项,约束子目标生成方向。
(4) 伪代码对应:
# 高层策略更新
high_loss = -td3_reward + eta * landmark_loss
high_policy.update(high_loss)6.4 低层策略(Low-level Policy, )的优化
(1)优化目标:最小化当前状态与子目标的距离(稠密、即时奖励)。
(2)优化步骤:
- 数据收集:
- 每个时间步 t,低层策略根据当前状态 sts_tst和子目标 gtg_tgt生成动作 ata_tat 。
- 存储转移 (st,gt,at,st+1)(s_t,g_t,a_t,s_{t+1})(st,gt,at,st+1) 到 B\mathcal{B}B。
- 奖励计算:
- 相对子目标:rlowr^{low}rlow
- 绝对子目标:rhighr^{high}rhigh
- 策略更新:
- 使用标准TD3算法优化,最大化 rlowr^{low}rlow 。
- 无辅助损失:低层仅需拟合子目标,无需地标引导。
(3)伪代码对应:
# 低层策略更新
low_loss = -low_level_reward
low_policy.update(low_loss)