2022年CIE SCI2区TOP,NSGA-II+直升机-无人机搜救任务分配,深度解析+性能实测
目录
- 1.摘要
- 2.数学模型
- 3.求解方法
- 4.结果展示
- 5.参考文献
- 6.代码获取
- 7.算法辅导·应用定制·读者交流
1.摘要
无人机任务分配对于保障搜救活动高效有序开展具有重要意义,但现有研究较少考虑无人机作业环境与性能对任务分配的影响。针对低空风场和地形因素对无人机能耗与性能的影响,本研究提出了直升机释放位置选择与任务分配模型。考虑到地形因素会影响无人机探测区域,采用主成分分析法确定各搜救点的搜救等级,并运用聚类分析确定无人机悬停续航能力。结合无人机性能、低空风场等影响电池能耗的因素,构建无人机释放位置选择模型,采用改进二进制蝙蝠算法求解。根据释放位置规划结果,建立以总搜救成本最小、无人机数量最少及多机任务均衡为目标的优化模型,运用NSGA-II进行求解。
2.数学模型
无人机释放位置选择模型
无人机任务分配必须将实际避障能耗纳入考量,本研究基于最坏工况假设,建立以下能量管理机制:满载无人机必须保持2/3能量状态抵达目标点,并预留1/3能量用于返航。
minZ=∑j∈M∑k∈NczjkSjk+∑j∈MFjxjminZ=\sum_{j\in M}\sum_{k\in N}cz_{jk}S_{jk}+\sum_{j\in M}F_jx_j minZ=j∈M∑k∈N∑czjkSjk+j∈M∑Fjxj
无人机搜救任务分配模型
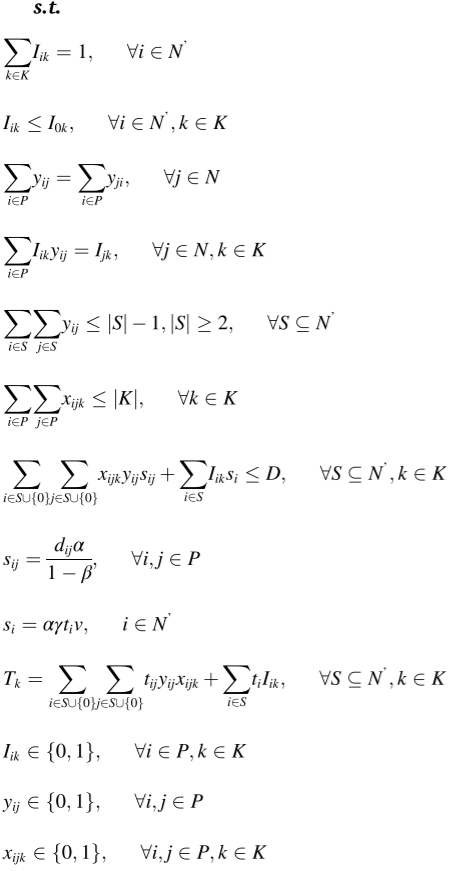
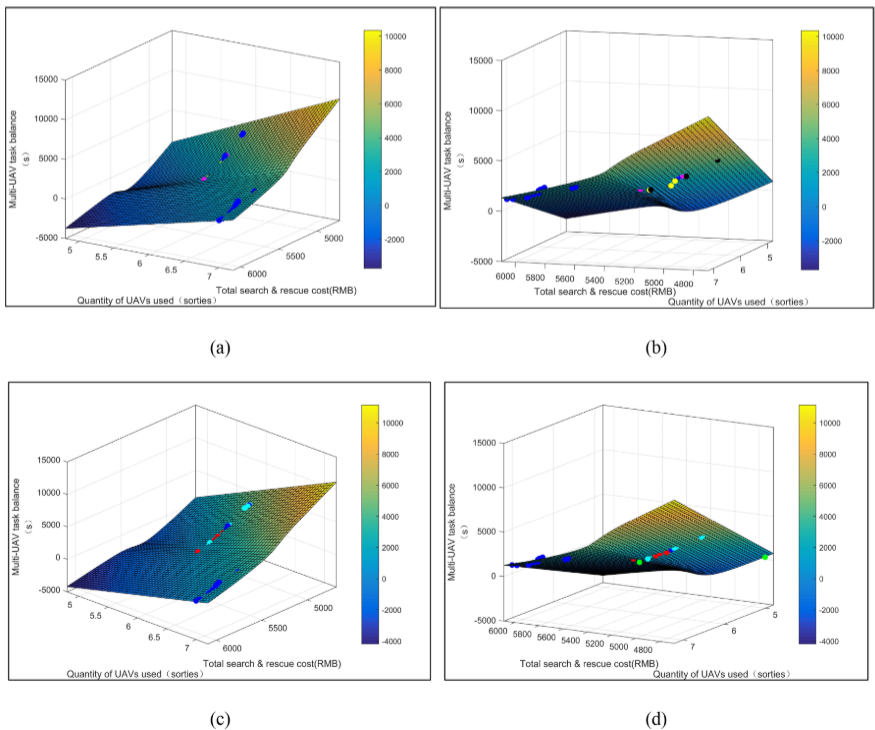
目标函数主要包括三部分,即无人机的搜救成本,以及使用的无人机数量和完成任务所需的总时间。应考虑无人机的任务平衡性和合理性。目标函数要求总成本最小,包括无人机飞行和悬停产生的航程成本,前者与无人机飞行航程能耗成正比,后者与悬停时间成正比。
minZ1=minc(∑k∈K∑i∈P∑j∈Psijyijxijk+∑i∈Nsi)minZ_1=minc\left(\sum_{k\in K}\sum_{i\in P}\sum_{j\in P}s_{ij}y_{ij}x_{ijk}+\sum_{i\in N}s_i\right) minZ1=minck∈K∑i∈P∑j∈P∑sijyijxijk+i∈N∑si
无人机的实际数量在实践中是有限的,因此使用的无人机数量应尽可能低。
minZ2=min∑k∈K∑j∈Px0jkminZ_2=min\sum_{k\in K}\sum_{j\in P}x_{0jk} minZ2=mink∈K∑j∈P∑x0jk
考虑任务平衡性,在考虑成本问题的同时,将不同无人机花费任务的时间最大差异减小到最小。
minZ3=min{Tkmax−Tkmin},Tkmax,Tkmin∈TminZ_3=min\{T_{kmax}-T_{kmin}\},T_{kmax},T_{kmin}\in T minZ3=min{Tkmax−Tkmin},Tkmax,Tkmin∈T
3.求解方法
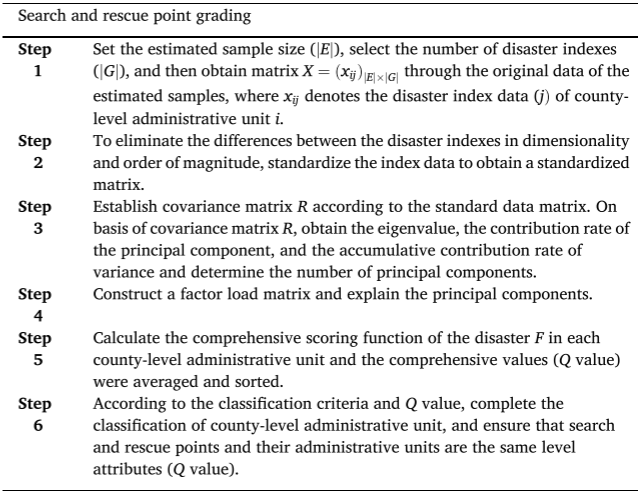
主成分分析法对搜救点进行分级
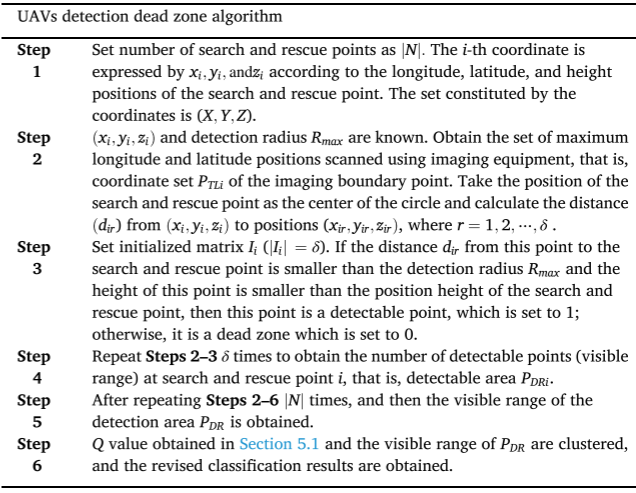
无人机探测盲区算法
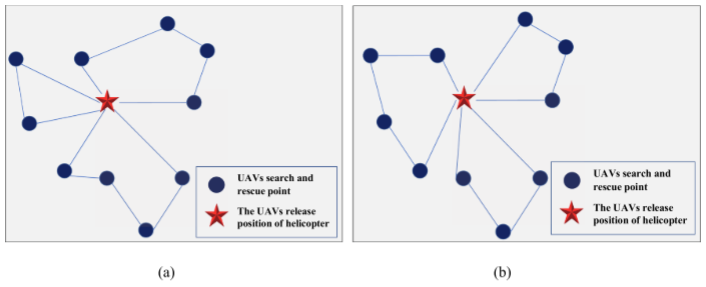
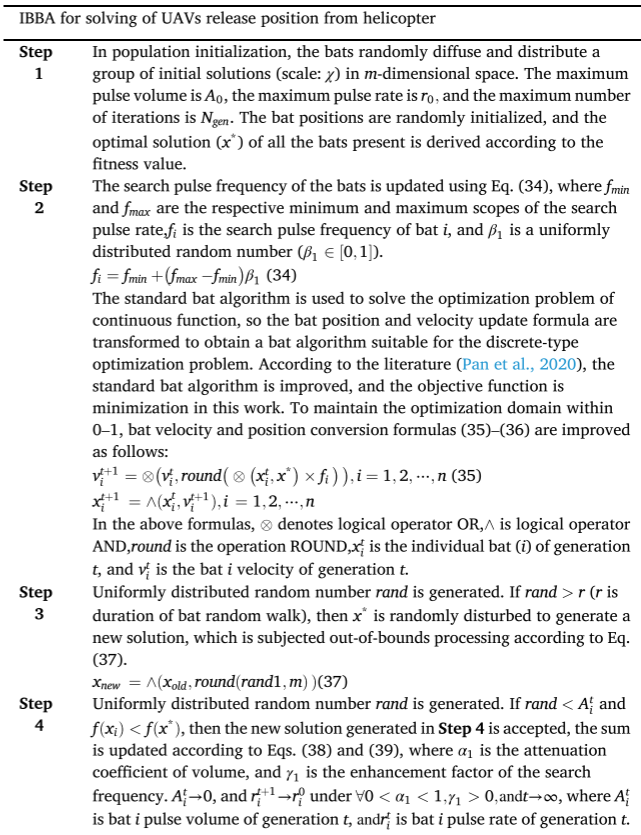
IBBA解决无人机从直升机上的释放位置
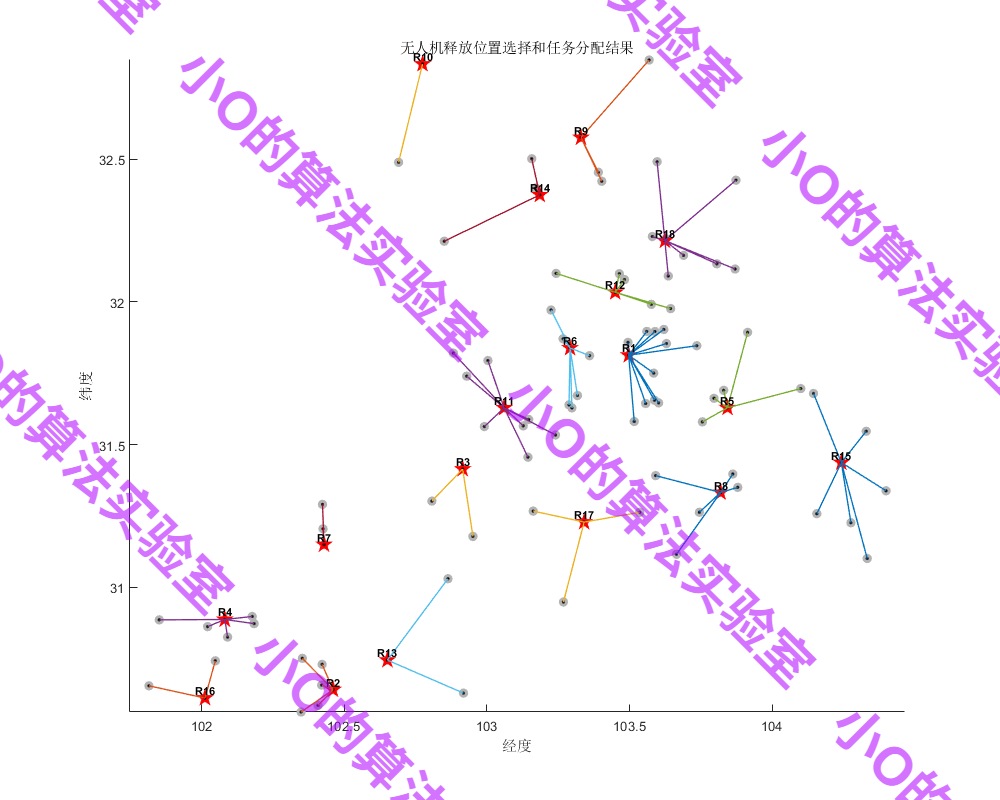
基于NSGA-II的无人机任务分配
考虑到多无人机任务分配问题的局限性,参考文献(Wang et al., 2018),采用双染色体编码方法进行编码,其中染色体I表示目标序列,染色体II表示目标序列在I上的切割位置。I上的每个基因表示每个搜索目标的索引,基因总数为NT。任意一个基因的值不得小于其前一个基因的值,基因号为(NU−1)。

NSGA-II采用快速非支配排序,拥挤度比较算子,个体iii的拥挤距离:
L(i)=∑k=13Zk×(L(i+1)−L(i−1))/(Zkmax−Zkmin)L(i)=\sum_{k=1}^3Z_k\times(L(i+1)-L(i-1))/\left(Z_k^{max}-Z_k^{min}\right) L(i)=k=1∑3Zk×(L(i+1)−L(i−1))/(Zkmax−Zkmin)

4.结果展示

5.参考文献
[1] Zhang M, Li W, Wang M, et al. Helicopter–UAVs search and rescue task allocation considering UAVs operating environment and performance[J]. Computers & Industrial Engineering, 2022, 167: 107994.
6.代码获取
xx