如何使用 OpenCV 打开指定摄像头
在计算机视觉应用中,经常需要从特定的摄像头设备获取视频流。例如,在多摄像头环境中,当使用 OpenCV 的 cv::VideoCapture 类打开摄像头时,如果不指定摄像头的 ID,可能会随机打开系统中的某个摄像头,或者按照设备连接的顺序打开第一个可用的摄像头。
比如:
// 打开两个摄像头cv::VideoCapture cap0(0);if (!cap0.isOpened()) {cap0.open(0);}cv::VideoCapture cap1(1);if (!cap0.isOpened() || !cap1.isOpened()) {std::cerr << "Error: Cannot open camera" << std::endl;return;}
在多摄像头环境下,这种方式可能无法满足应用需求。此外,直接使用摄像头 ID 的方式可能不够稳定,因为设备的连接顺序或系统分配的 ID 可能会发生变化。
那如何使用 OpenCV 打开指定的摄像头呢?我们知道,摄像头都会在安装后,操作系统会生成一个设备ID信息,
操作系统就是根据摄像头的 PID(产品 ID)和 VID(供应商 ID)来精确识别并打开某个摄像头的。
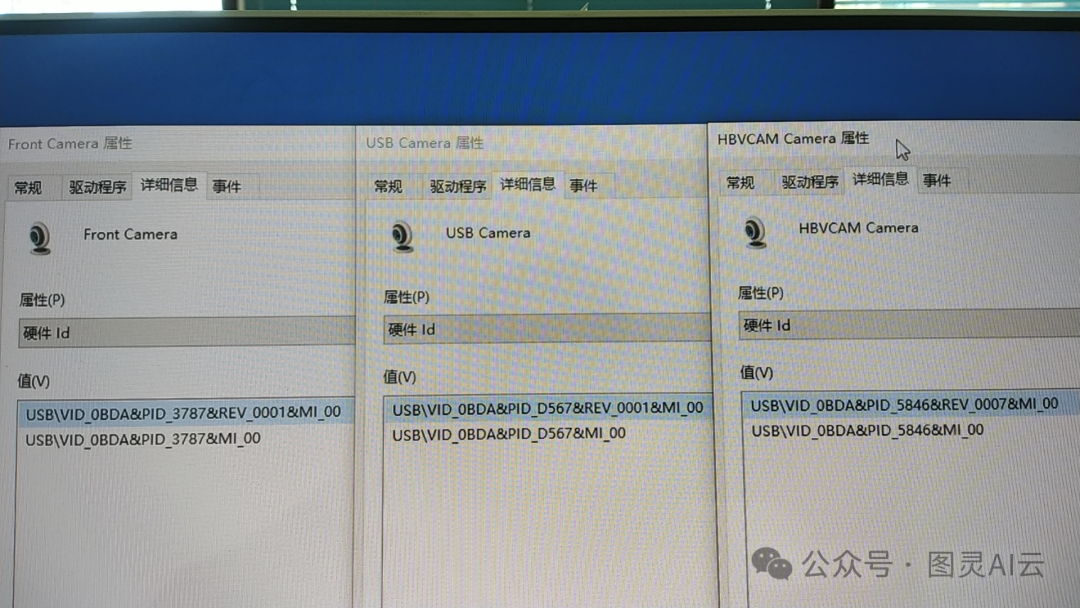
如图所示,对应关系分别如下:
VID_0BDA&PID_3787 (Front Camera)
VID_0BDA&PID_5846 (HBVCAM Camera)
VID_0BDA&PID_D567 (USB Camera)
解决办法
那OpenCV是否支持在打开摄像头时,根据个信息进行指定呢?当然可以。
在 Windows 系统中,摄像头设备通常通过 DirectShow API 进行管理和操作。而 OpenCV 是一个功能强大的开源计算机视觉库,提供了与摄像头交互的接口。结合两者的优势,可以方便地实现对指定摄像头的访问。
通过以下步骤实现对指定摄像头的打开:
1. 使用 DirectShow API 枚举系统中的摄像头设备,并获取每个设备的详细信息,包括设备路径、PID 和 VID 等。
2. 根据用户指定的 PID 和 VID,在设备列表中查找匹配的设备,并获取其对应的设备 ID。
3. 使用 OpenCV 的
cv::VideoCapture类,结合设备 ID 和 DirectShow API,打开指定的摄像头设备。
以下是完整的 C++ 代码,展示了如何使用 OpenCV 和 DirectShow API 打开指定 PID 和 VID 的摄像头:
#include <iostream>
#include <vector>
#include <string>
#include <algorithm>
#include <opencv2/opencv.hpp>
#include <DShow.h>
#include <atlstr.h>
#pragma comment(lib,"Strmiids.lib")// 定义导出函数的宏
#ifdef _WIN32
#define DLL_EXPORT __declspec(dllexport)
#else
#define DLL_EXPORT
#endif// 获取摄像头ID的函数
DLL_EXPORT int getCamIDFromPidVid(const char* pidvid) {std::vector<std::string> devList; // 设备列表int iCameraNum = 0; // 设备个数ICreateDevEnum* pDevEnum = NULL;IEnumMoniker* pEnum = NULL;HRESULT hr = CoInitialize(NULL);if (FAILED(hr)) {std::cerr << "COM 初始化失败,错误码: " << hr << std::endl;return-1;}hr = CoCreateInstance(CLSID_SystemDeviceEnum, NULL, CLSCTX_INPROC_SERVER, IID_ICreateDevEnum, reinterpret_cast<void**>(&pDevEnum));if (FAILED(hr)) {std::cerr << "创建设备枚举器失败,错误码: " << hr << std::endl;CoUninitialize();return-1;}hr = pDevEnum->CreateClassEnumerator(CLSID_VideoInputDeviceCategory, &pEnum, 0);if (hr != S_OK && hr != S_FALSE) {std::cerr << "枚举视频输入设备类别失败,错误码: " << hr << std::endl;pDevEnum->Release();CoUninitialize();return-1;}if (hr == S_FALSE) {std::cerr << "没有找到视频输入设备" << std::endl;pDevEnum->Release();CoUninitialize();return-1;}IMoniker* pMoniker = NULL;ULONG cFetched;while (pEnum->Next(1, &pMoniker, &cFetched) == S_OK) {IPropertyBag* pPropBag;hr = pMoniker->BindToStorage(0, 0, IID_IPropertyBag, reinterpret_cast<void**>(&pPropBag));if (SUCCEEDED(hr)) {VARIANT varName;VariantInit(&varName);varName.vt = VT_BSTR;hr = pPropBag->Read(L"DevicePath", &varName, NULL);if (SUCCEEDED(hr) && varName.vt == VT_BSTR && varName.bstrVal != nullptr) {std::wstring wstrDevicePath(varName.bstrVal);std::string strDevicePath(wstrDevicePath.begin(), wstrDevicePath.end());devList.push_back(strDevicePath);iCameraNum++;} else {std::cerr << "读取设备路径失败,错误码: " << hr << std::endl;}VariantClear(&varName);pPropBag->Release();}pMoniker->Release();}pEnum->Release();pDevEnum->Release();// 将输入的pidvid转换为小写std::string lowerPidvid = pidvid;std::transform(lowerPidvid.begin(), lowerPidvid.end(), lowerPidvid.begin(), ::tolower);int iRet = -1;for (int i = 0; i < devList.size(); i++) {// 将设备路径转换为小写std::string lowerDevicePath = devList[i];std::transform(lowerDevicePath.begin(), lowerDevicePath.end(), lowerDevicePath.begin(), ::tolower);if (lowerDevicePath.find(lowerPidvid) != std::string::npos) {iRet = i;break;}}CoUninitialize();return iRet;
}// 主函数示例
int main() {// 替换为你的摄像头的PID和VID,支持大写和小写std::string targetPidVid = "VID_XXXX&PID_XXXX"; // 例如:"VID_046D&PID_0825"int camId = getCamIDFromPidVid(targetPidVid.c_str());if (camId == -1) {std::cout << "未找到匹配的摄像头" << std::endl;return-1;}std::cout << "摄像头ID: " << camId << std::endl;// 使用OpenCV打开摄像头cv::VideoCapture cap;cap.open(camId, cv::CAP_DSHOW);if (!cap.isOpened()) {std::cerr << "无法打开摄像头,ID: " << camId << std::endl;return-1;}// 尝试读取一帧,验证摄像头是否真的可用cv::Mat frame;if (!cap.read(frame)) {std::cerr << "无法从摄像头读取帧,ID: " << camId << std::endl;cap.release();return-1;}std::cout << "摄像头已成功打开" << std::endl;while (true) {cap >> frame;if (frame.empty()) {std::cerr << "无法读取帧" << std::endl;break;}cv::imshow("Camera", frame);if (cv::waitKey(1) == 27) { // 按ESC键退出break;}}cap.release();cv::destroyAllWindows();return0;
}注意细节
1. 确保安装了 OpenCV 库,并正确配置了开发环境。
2. 根据实际摄像头的 PID 和 VID 修改代码中的
targetPidVid变量值。3. 在编译代码时,链接必要的库文件,如
Strmiids.lib和 OpenCV 相关的库。4. 在选择摄像头时,我们要确保多个摄像头要各不一样(这样即可保证通过VID/PID来区分摄像头),但每一种都要采购统一(保证在不同电脑上VID/PID都一样)。
5. 上述相关思想也可以在 *nix 等系统中使用。
通过上述代码和方法,可以实现根据摄像头的 PID 和 VID 精确打开指定的摄像头设备,适用于多摄像头环境和需要精确设备识别的场景。